



comsol周期性结构多极子展开 包含透射谱计算,多极子分解(可导出数据用其他软件绘制也可comsol直接出图)
在光子晶体和超表面设计里,周期性结构的多极子分析简直像开透视挂——直接看到电磁场怎么在结构里蹦迪。COMSOL里搞这个其实不难,今天咱们边撸代码边唠嗑,手把手整明白透射谱和多极子分解的骚操作。
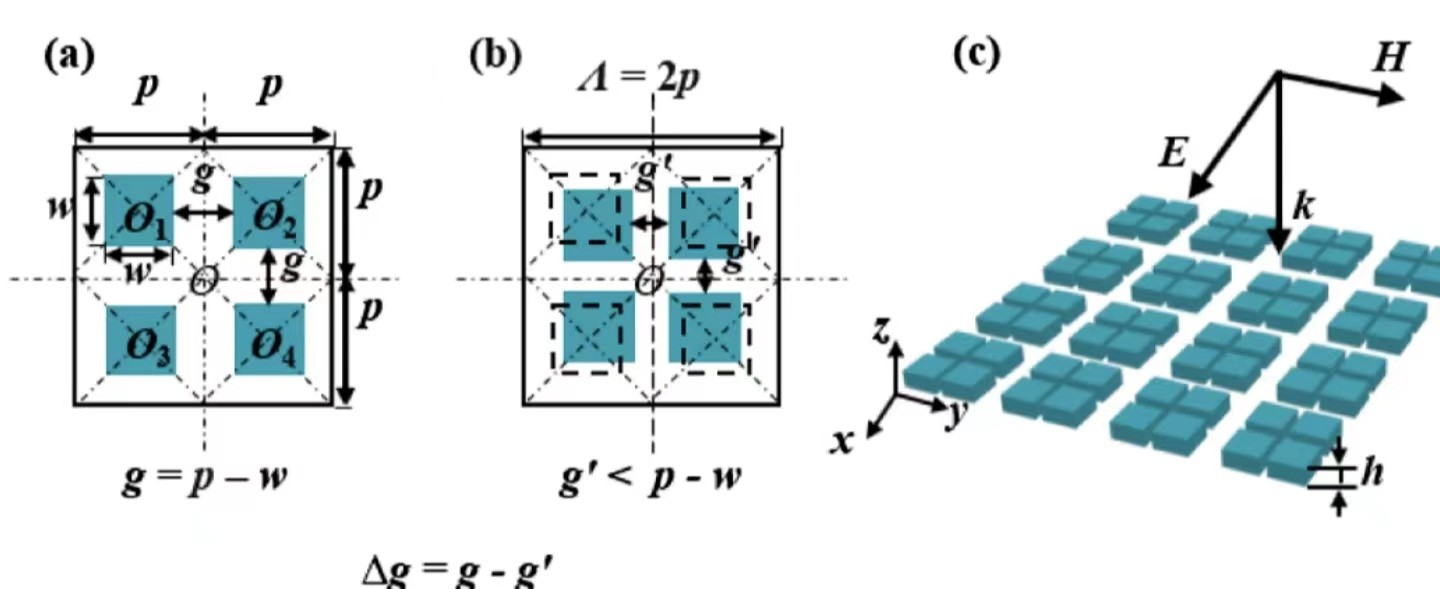
先整活基础模型:建个二维光子晶体板,六边形晶格开洞那种经典结构。材料参数别用默认值,记得把硅的相对介电常数改成12.11(别问为啥是这个数,问就是实测数据)。端口边界设置有个坑——上下面记得勾选"Floquet周期性条件",不然算出来的透射谱能歪到姥姥家。
透射谱计算直接上参数扫描:
for (double lambda = 400e-9; lambda <= 800e-9; lambda += 10e-9) {
model.param.set("lambda", lambda+"[m]");
model.study("std1").run();
double T = model.result().table().getReal("t1");
exportData("Transmission.txt", lambda, T);
}这段脚本实现自动扫波长,每次计算完把透射率塞进txt。注意别在循环里直接操作图形界面,COMSOL的GUI对象特别娇气,容易崩。
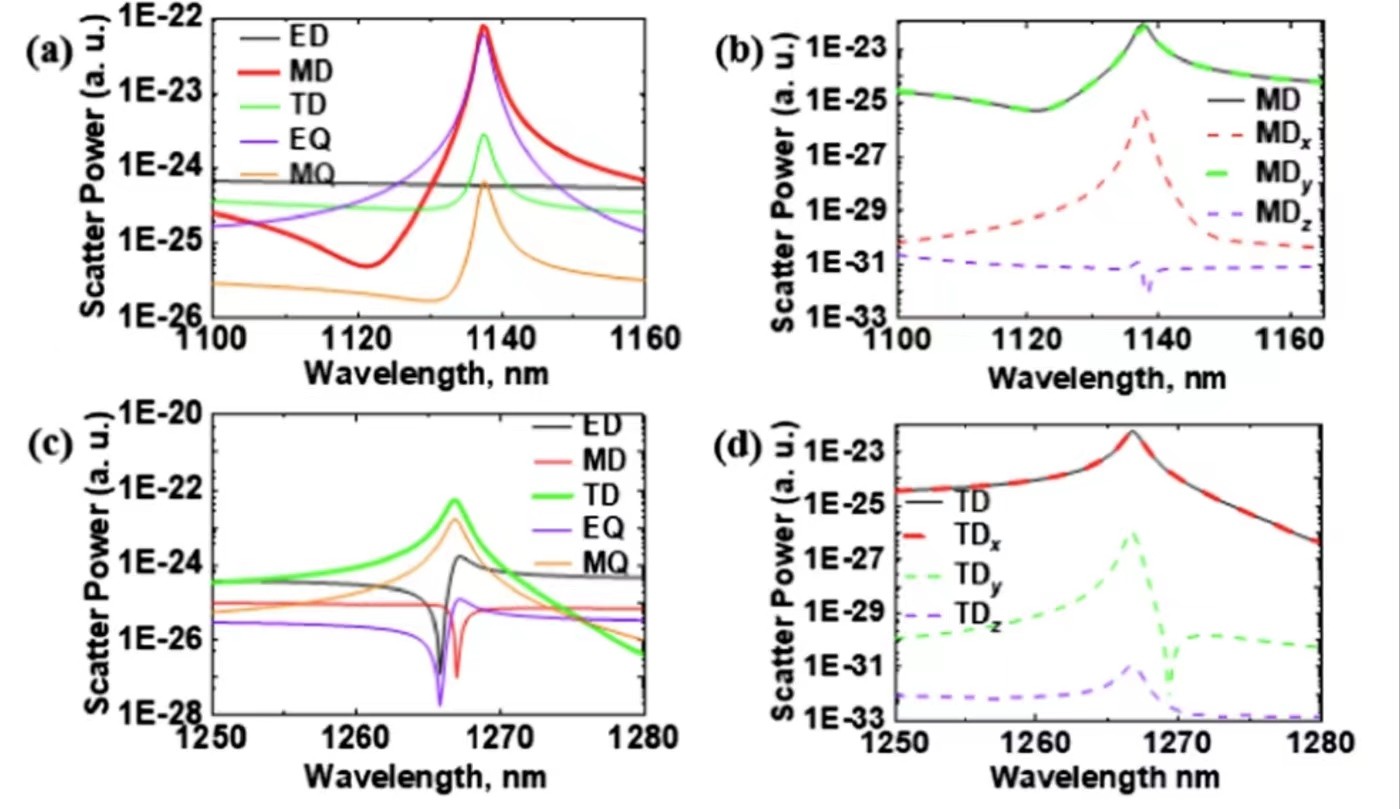
多极子分解才是重头戏。在电磁波频域接口里找到"多极子展开",设置观测面距离结构表面至少半个波长。核心代码在这儿:
model.component("comp1").physics("emw").feature().create("mpe1", "MultipoleExpansion", 3);
model.component("comp1").physics("emw").feature("mpe1").set("relDist", 0.5);
model.component("comp1").physics("emw").feature("mpe1").set("numPoles", 6);这波操作直接提取到六极子分量。注意relDist参数别设太小,否则数值误差能让你怀疑人生。计算结果别急着导出,先在COMSOL里用极坐标图预览,看到偶极子辐射方向图像八爪鱼就对了。
数据导出有讲究,用这个脚本把多极子分量打包成矩阵:
String[] poles = {"Dipole","Quadrupole","Octupole"};
double[][] data = new double[3][freq.length];
for (int i=0; i<freq.length; i++) {
for (int j=0; j<3; j++) {
data[j][i] = model.result().table().getReal("mpe_"+poles[j]+"_"+i);
}
}
exportMatrix("pole_data.csv", data);导出的csv用Python处理比COMSOL原生绘图更灵活,上seaborn画个堆叠面积图,瞬间逼格拉满。要是赶时间就直接用COMSOL的结果模板,把多极子贡献叠成彩虹色系,发文章够用了。
最后提醒:算大型结构时记得开分布式计算,本地机器跑崩了别怪我没说。多极子分解的内存消耗是O(n²),网格划太细的话,16G内存撑不过三分钟。

















 1220
1220

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









