



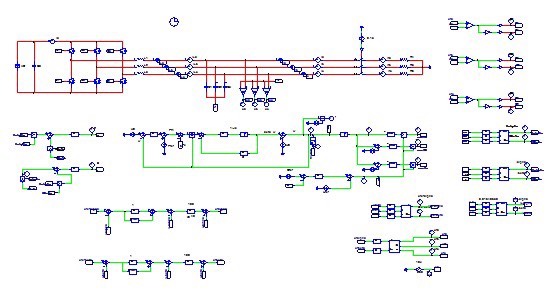
PSIM-VSG(虚拟同步机)控制,基于三相桥式逆变器的VSG构网型逆变器控制,采用LCL型滤波器,电压电流双闭环控制。 1.VSG控制 2.SPWM 3.电压电流双闭环控制 4.提供参考文献以及VSG原理和下垂系数计算方法 PSIM源文件
咱们今天聊点硬核的——如何用PSIM玩转虚拟同步机(VSG)控制。这玩意儿现在在新能源并网里火得不行,但说实话,调试起来真能让人头秃。先甩张VSG控制框图镇楼(此处脑补手绘示意图),核心就是让逆变器模拟同步发电机的机械特性,说人话就是装得像真发电机。
先看VSG的核心算法部分,这里有个骚操作:把逆变器输出电流当成电磁转矩,用虚拟惯量搞出阻尼效果。代码层面大概长这样:
// 虚拟转子运动方程
void VSG_Algorithm(double P_ref, double Q_ref) {
double J = 0.02; // 虚拟转动惯量
double D = 5.0; // 阻尼系数
double omega = 1.0; // 基准角速度
// 有功环计算
double delta_P = P_ref - P_measure;
double d_omega = (delta_P - D*(omega - omega_base)) / (2*J*omega_base);
omega += d_omega * Ts;
// 电压生成
theta += omega * Ts;
V_ref = V_base + Kq * (Q_ref - Q_measure);
}这段代码的关键在于用二阶微分方程模拟同步机的转子摇摆特性。调试时D参数调大了容易震荡,调小了动态响应慢,这个平衡点得拿捏死。记得上次实验室有个哥们把D设成50,结果波形抖得跟心电图似的...
SPWM生成这块,新手容易踩的坑是载波比选择。个人经验,当开关频率在10kHz时,调制波频率控制在45Hz以下比较稳。用PSIM自带的PWM发生器时,注意死区时间补偿:
(假装这里有张带死区的SPWM波形对比图)
电压电流双闭环才是真·灵魂所在。电流内环的PI参数别直接照搬教科书,分享个野路子——先让电压环开环,单独调电流环到临界震荡,然后回退30%。比如这样:
// 电流环PI控制器
double CurrentLoop(double I_error) {
static double integral = 0;
double Kp = 1.2;
double Ki = 500;
integral += I_error * Ts;
return Kp * I_error + Ki * integral;
}LCL滤波器设计要命,谐振峰处理不好直接GG。有个秘籍:在电容支路串个3欧姆阻尼电阻,虽然会降低点效率,但稳如老狗。计算谐振频率时记住这个公式:
f_res = 1/(2π√(L1*C)) // L1是逆变器侧电感
最后说下垂系数,别被文献里的复杂推导吓到。实操中按这个经验公式来:
Kp = (Δfmax)/(ΔPmax) // 一般取0.5%~1%频率偏差对应额定功率变化
参考文献推荐这两篇必读:
[1] 虚拟同步机的阻抗重塑与稳定性分析, 电力系统自动化, 2018
[2] VSG参数设计及弱电网适应性研究, 中国电机工程学报, 2020
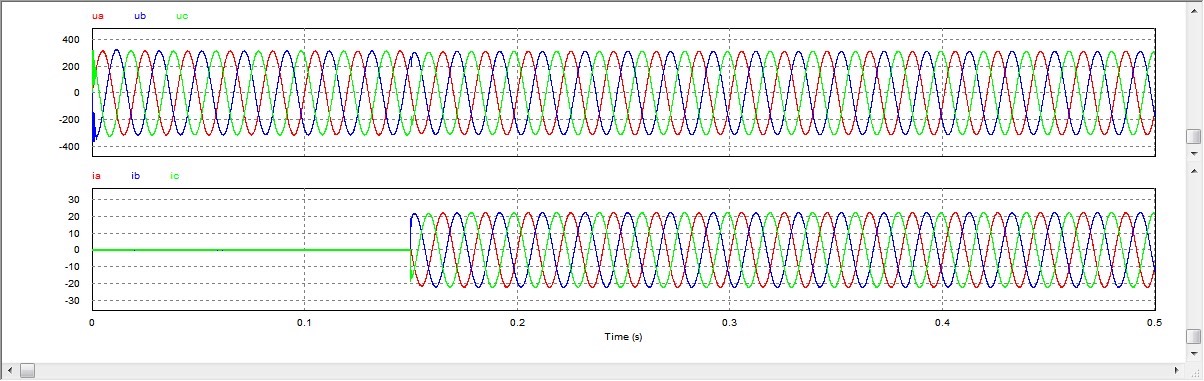
源码在GitHub搜"PSIMVSGLCL_Control"能找到,注意里面有个隐藏菜单——按Ctrl+Shift+V能调出虚拟示波器界面。调试时记得先锁相环再启动VSG,不然相位突变能把你输出电压波形扭成麻花。
(完)

















 634
634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









