




 本文提出一种基于超像素的视差细化方法,通过两层优化处理遮挡并提升立体匹配精度。首先,利用马尔可夫随机域优化估计超像素平均视差,构建三维邻域系统。其次,结合贝叶斯推理与预测,实现二阶平滑约束下的局部优化,有效处理高度倾斜表面。该方法在Middlebury和KITTI数据集上表现优秀。
本文提出一种基于超像素的视差细化方法,通过两层优化处理遮挡并提升立体匹配精度。首先,利用马尔可夫随机域优化估计超像素平均视差,构建三维邻域系统。其次,结合贝叶斯推理与预测,实现二阶平滑约束下的局部优化,有效处理高度倾斜表面。该方法在Middlebury和KITTI数据集上表现优秀。
摘要
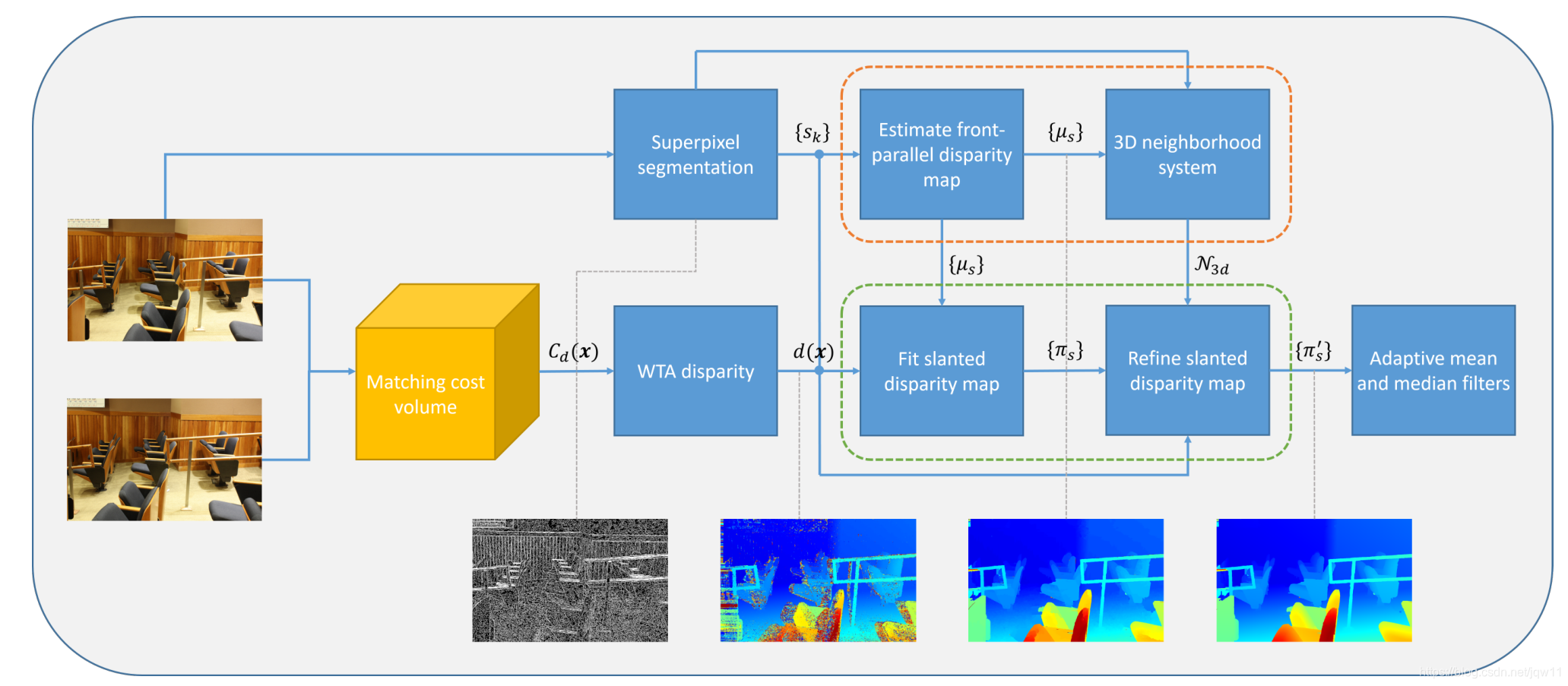
摘要:本文提出了一种视差细化方法,通过对视差统计意义的探讨,直接细化赢者通吃视差图。根据基于分割的立体匹配的主要步骤,将参考图像过度分割为超像素,并通过改进的随机样本对每个超像素进行视差面拟合共识(RANSAC)。我们设计了一个两层优化来细化视差平面。在全局优化中,利用马尔可夫随机域(MRF)推理估计超像素点的平均视差,然后根据平均视差推导出遮挡处理的三维邻域系统。在局部优化中,采用贝叶斯推理和贝叶斯预测相结合的概率模型,隐式地实现了三维邻居间的二阶平滑。两层优化是一种纯视差细化方法,因为在细化过程中不需要立体图像对之间的相关信息。在Middlebury和KITTI数据集上的实验结果表明,该方法能够快速准确地进行立体匹配,有效地处理遮挡。由此可见,“匹配成本计算+视差细化”框架是在较低的计算成本下生成精确视差图的一种可能的解决方案。
1.相关工作
1.1MRF Stereo Methods
马尔可夫随机场(MRF)立体视觉方法将匹配问题形式化为标签问题,其目标是优化测量标签质量的全局能量函数。传统的MRF立体方法[18]、[19]给每个像素分配一个一维离散视差标签。利用图割[20]、[21]、信念传播[22]、[23]、TRW[24]等优化方法,实现能量函数的最小化。基于图切割的扩展移动和交换移动[18]显示出良好的性能。这些移动可以同时更新所有像素的标签,因此优化很难被局部极小值捕获。一维标签立体声方法的缺点是建模高度倾斜的表面。三维标签立体方法[25][27]的提出,以建立更准确的模型。这些方法不仅可以对高度倾斜曲面进行建模,而且可以实现二阶平滑约束[25]、[28]、[29]。因此,它们通常比1D标签方法有更好的准确性。然而,像素级的全局优化使计算变得复杂。
我们的方法在超像素层上执行一维标签MRF推理
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 75
75




 到【灌水乐园】发言
到【灌水乐园】发言







