







标定系列——基于OpenCV4.5.3的lidar与cam外参标定算法(十九)
说明
基于OpenCV4.5.3的lidar与cam外参标定算法,注意OpenCV的版本
记录
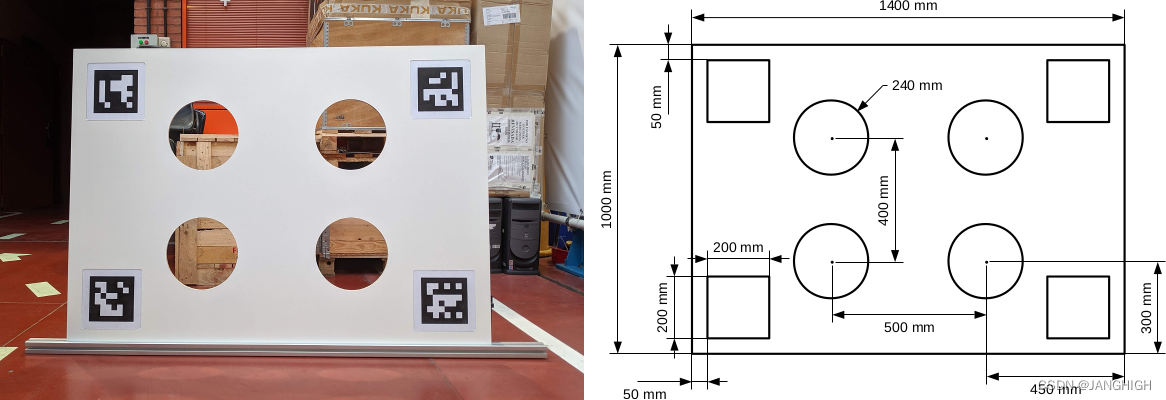
标定板尺寸
CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(velo2cam_calibration)
SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14 -w ")
## Find catkin macros and libraries
find_package(catkin REQUIRED COMPONENTS
cv_bridge
image_geometry
image_transport
message_filters
roscpp
pcl_ros
sensor_msgs
std_msgs
stereo_msgs
tf
tf_conversions
dynamic_reconfigure
cmake_modules
)
set(OpenCV_DIR /home/aaa/software/opencv-4.5.3/build)
find_package(TinyXML REQUIRED)
find_package(OpenCV 4.5.3 REQUIRED)
generate_dynamic_reconfigure_options(
cfg/Lidar.cfg
cfg/Stereo.cfg
cfg/Monocular.cfg
cfg/Plane.cfg
)
################################################
## Declare ROS messages, services and actions ##
################################################
## Generate messages in the 'msg' folder
add_message_files(
FILES
ClusterCentroids.msg
)
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
sensor_msgs
)
###################################
## catkin specific configuration ##
###################################
catkin_package(
INCLUDE_DIRS include
DEPENDS TinyXML
)
###########
## Build ##
###########
include_directories(
include
${catkin_INCLUDE_DIRS}
${OpenCV_LIBRARIES}
${TinyXML_INCLUDE_DIRS}
)
#link_directories()
#add_definitions()
## Declare cpp executables
add_executable(lidar_pattern src/lidar_pattern.cpp)
add_executable(stereo_pattern src/stereo_pattern.cpp)
add_executable(mono_qr_pattern src/mono_qr_pattern.cpp)
add_executable(velo2cam_calibration src/velo2cam_calibration.cpp)
add_executable(v2c_plane_segmentation src/plane.cpp)
add_executable(v2c_disp_masker src/disp_masker.cpp)
## Add cmake target dependencies of the executable/library
## as an example, message headers may need to be generated before nodes
add_dependencies(lidar_pattern
${catkin_EXPORTED_TARGETS}
velo2cam_calibration_generate_messages_cpp
${PROJECT_NAME}_gencfg
)
add_dependencies(stereo_pattern
${catkin_EXPORTED_TARGETS}
velo2cam_calibration_generate_messages_cpp
${PROJECT_NAME}_gencfg
)
add_dependencies(mono_qr_pattern
${catkin_EXPORTED_TARGETS}
velo2cam_calibration_generate_messages_cpp
${PROJECT_NAME}_gencfg
)
add_dependencies(
velo2cam_calibration
${catkin_EXPORTED_TARGETS}
velo2cam_calibration_generate_messages_cpp
${PROJECT_NAME}_gencfg
)
add_dependencies(v2c_plane_segmentation ${PROJECT_NAME}_gencfg)
## Specify libraries to link a library or executable target against
target_link_libraries(stereo_pattern
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)
target_link_libraries(lidar_pattern
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)
target_link_libraries(mono_qr_pattern
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)
target_link_libraries(velo2cam_calibration
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
${TinyXML_LIBRARIES}
)
target_link_libraries(v2c_plane_segmentation
${catkin_LIBRARIES}
)
target_link_libraries(v2c_disp_masker
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)
遇到的问题
1.在执行catkin_make后出现OpenCV的报错,错误内容类似如下:
error: ‘struct cv::aruco::DetectorParameters’ has no member named ‘cornerRefinementMethod’; did you mean ‘cornerRefinementWinSize’?
detectorParams->cornerRefinementMethod = aruco::CORNER_REFINE_SUBPIX;
^~~~~~~~~~~~~~~~~~~~~~
cornerRefinementWinSize
2.解决方法
对OpenCV进行源码编译,这里编译了opencv-4.5.3.zip和opencv_contrib-4.5.3.zip两个源码,并修改相应的CMakeLists.txt文件,问题解决。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









