 webots与rviz中雷达角度校正及定位问题解决方案
webots与rviz中雷达角度校正及定位问题解决方案





 博客讲述了在使用webots搭建雷达模型并配合rviz进行定位时,出现雷达朝向与实际不符的问题。作者发现是由于雷达在webots中的角度设置错误,通过将雷达角度逆时针旋转90度,成功解决了rviz中的pose偏差。如果遇到rviz定位频繁失败,建议检查雷达安装角度是否需要沿x轴旋转180度。
博客讲述了在使用webots搭建雷达模型并配合rviz进行定位时,出现雷达朝向与实际不符的问题。作者发现是由于雷达在webots中的角度设置错误,通过将雷达角度逆时针旋转90度,成功解决了rviz中的pose偏差。如果遇到rviz定位频繁失败,建议检查雷达安装角度是否需要沿x轴旋转180度。
一、问题点:
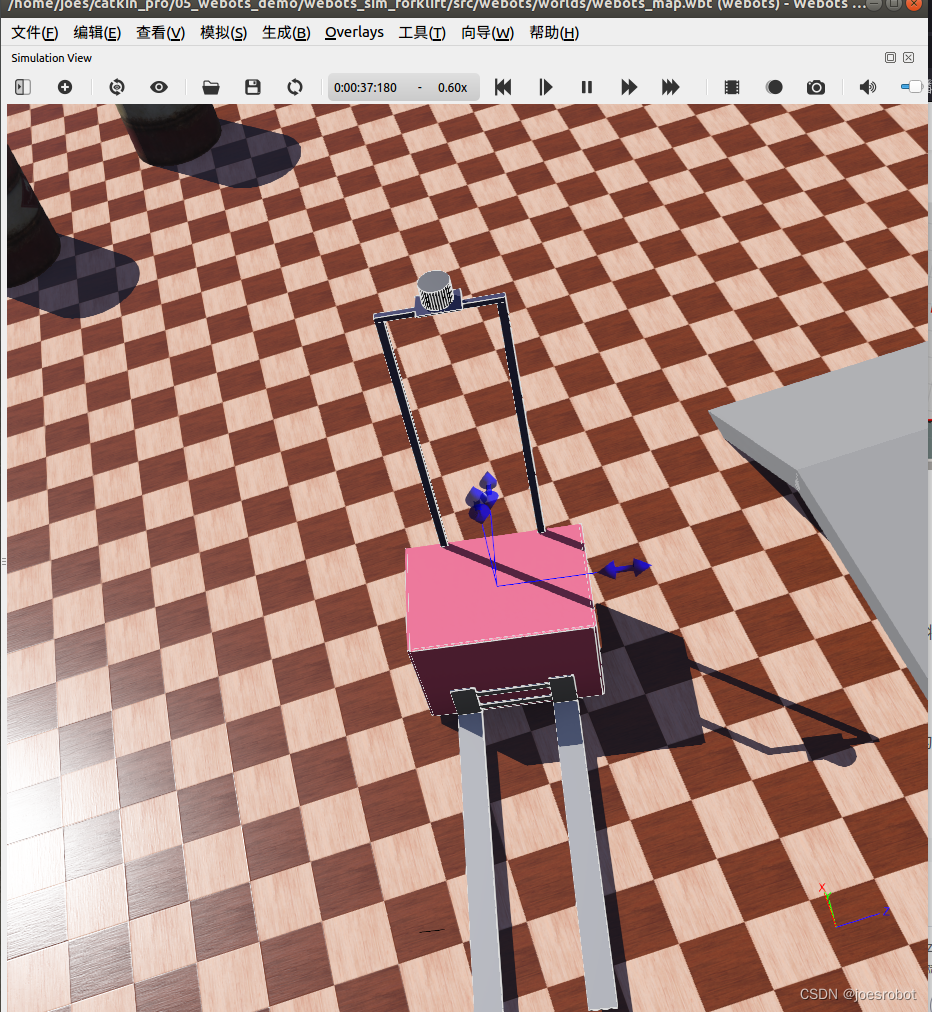
webots搭建好的雷达,但是rviz中加载打出的激光点与实际有角度或位移偏差,无法定位。在webots中的小车朝向正对某个障碍物,但是在rviz中显示的pose朝向与webots朝向偏差90度。
二、解决:
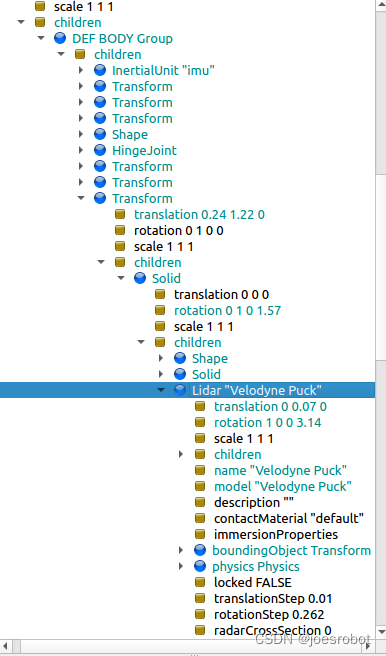
检查发现为雷达在webots中的搭建角度有问题,重新将角度逆时针旋转90度后,rviz中的pose朝向与webots的朝向可以匹配ok。
校正后rviz中pose朝向:
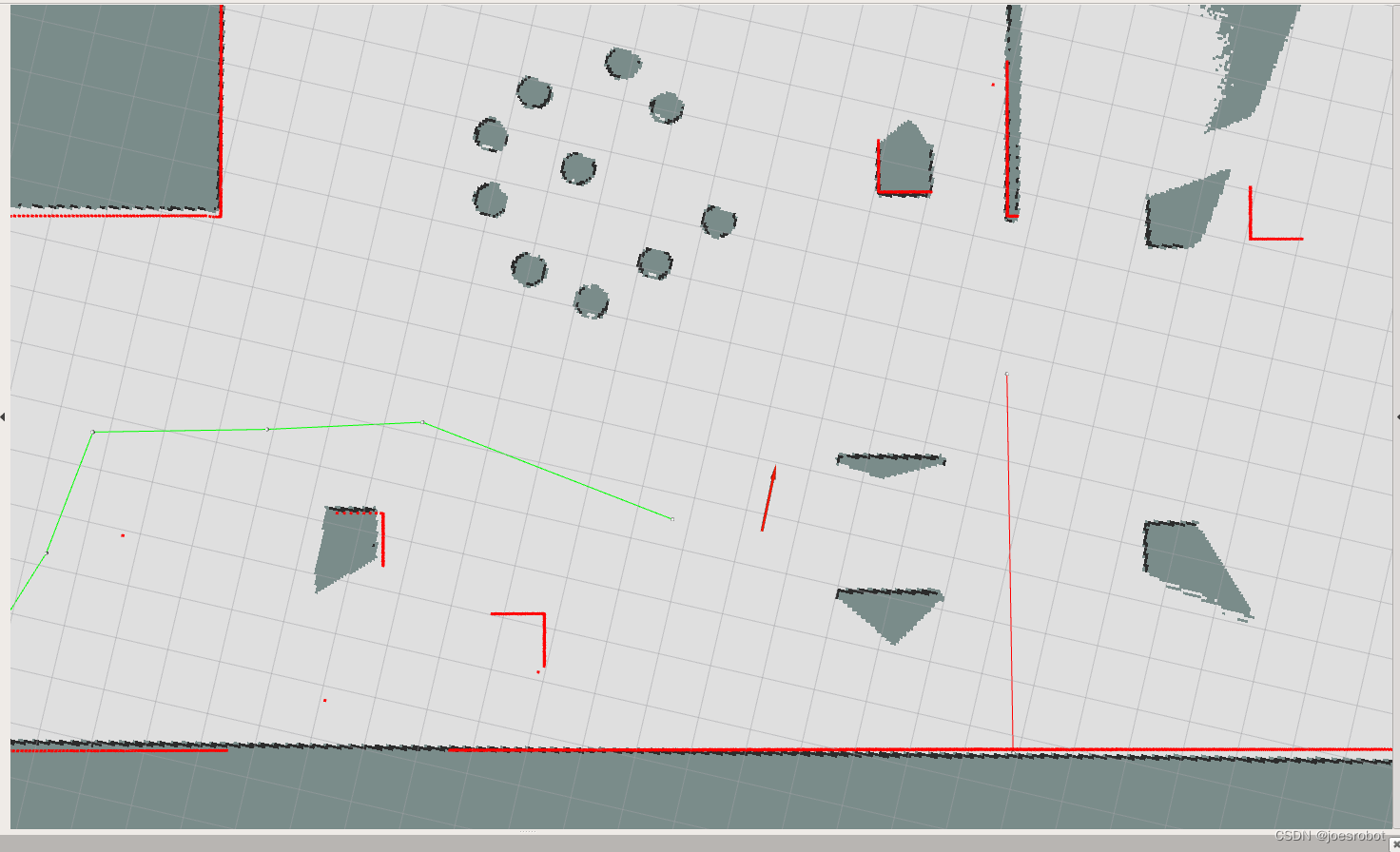
webots的x朝向
备注:
若是在rviz中定位经常失败,偏差特别大,检查雷达的安装角度是不是没有rao红轴x旋转180度导致的。贴图麻烦,就不贴了,学习问题,仅供参考。

















 3512
3512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









