



智能电机模块系统
摘要
我们开发了智能电机模块系统,可应用于服务机器人、家庭自动化、移动设备或各种原型和产品。该系统由多个电机模块及框架等若干组件构成。电机模块集成了电机、微控制器、射频(RF)模块、电池和旋转编码器。电机模块通过蓝牙低功耗等短距离无线通信技术相互连接或连接到其他计算机,并实现同步的智能运动控制。由于它们也可通过其他设备或直接连接到互联网,因此可作为物联网设备进行远程控制和感知。我们已利用该系统开发了一款远程临场机器人作为示例,能够通过互联网实时操作。
关键词 —电机;机器人;无线;
一、引言
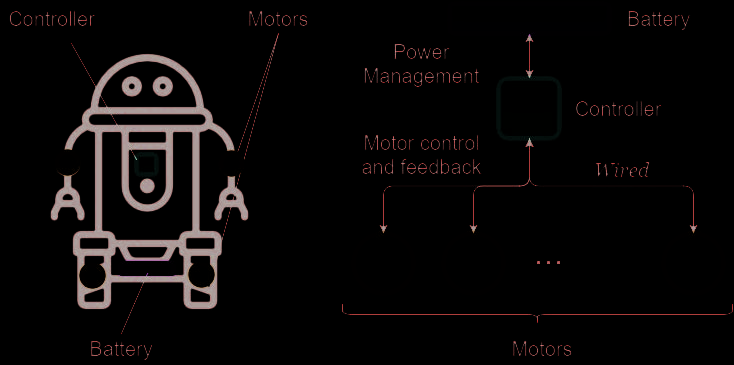
电机是机器人等自动化产品的关键组件,但由于电机设计需要电子学、机电一体化和控制工程等多方面的知识,开发电机控制系统耗费大量时间和成本。图1展示了传统电机控制系统,在机器人开发中,每次都需要重新设计该系统以满足所需规格。
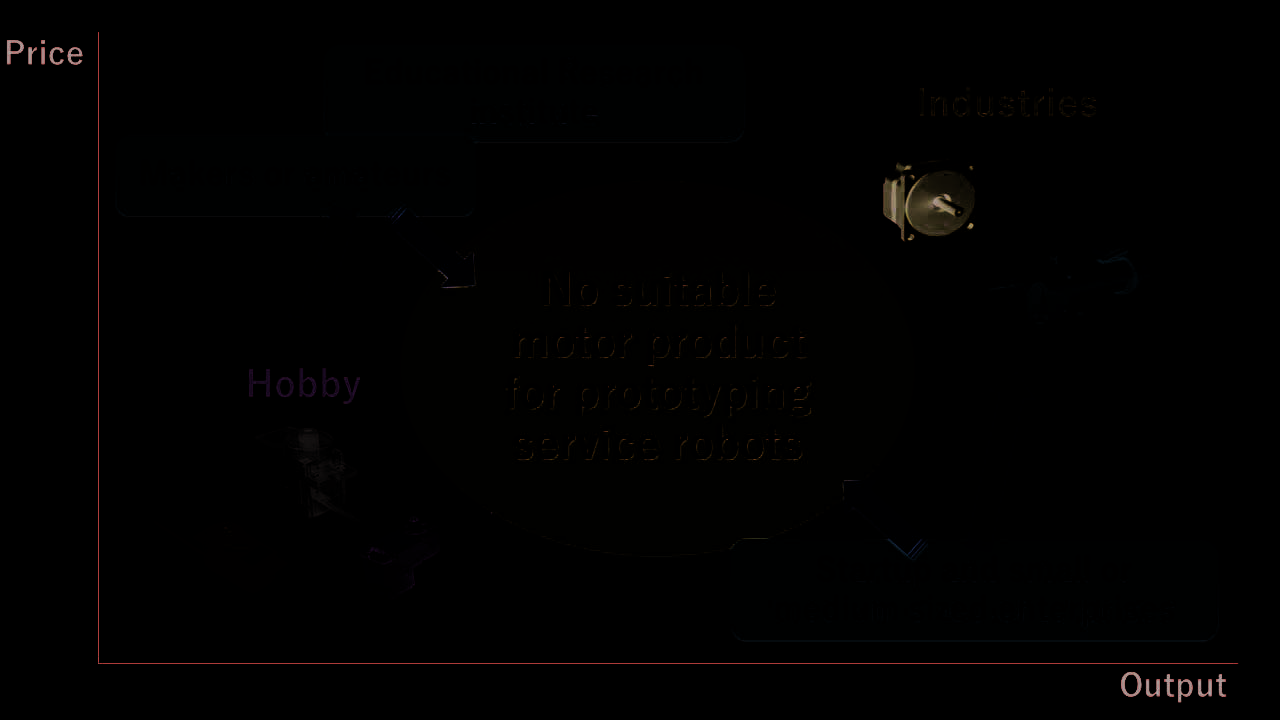
另一方面,由于数字建模、制造技术进步以及通过社交网络服务共享的开源技术,创客文化逐年发展。然而,目前市场上尚缺乏易于使用且适用于原型开发(尤其是服务机器人)的电机产品,尽管Arduino或树莓派等微控制器板已广泛普及。在图2中,我们展示了业余爱好者、教育研究机构和初创企业等创客群体在电机获取方面的实际情况。
在当前研究中,我们提出了一种新的原型设计方法,利用电机模块快速、简便地制造机器人或自动化产品。
II. 方法
图3显示了电机模块,该模块是一种集成执行器,包括电机、微控制器、射频模块、电池、旋转编码器,以及可选的齿轮减速器。
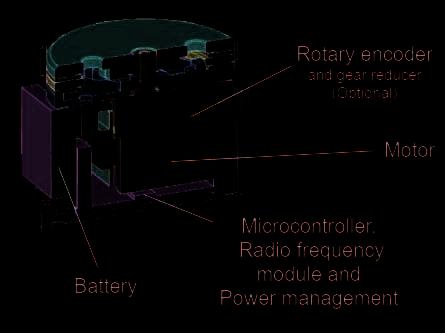
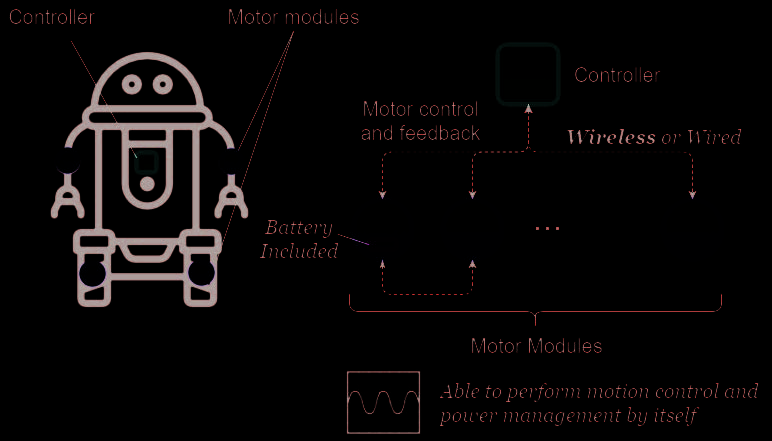
图4展示了采用智能电机模块实现的新型电机控制系统。电机模块集成了带有蓝牙低功耗模块的片上系统,可通过智能手机或其他微控制器进行无线或有线控制。由于电机模块自身具备智能运动控制逻辑和基本运动控制逻辑,类似于伺服电机,因此易于控制。根据原型设计规范,您只需直接使用图形用户界面应用程序或应用程序编程接口即可设置电机模块的功能。

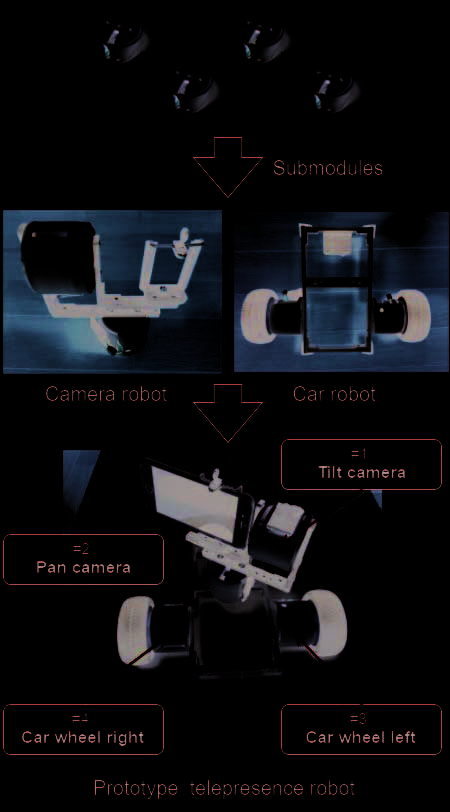
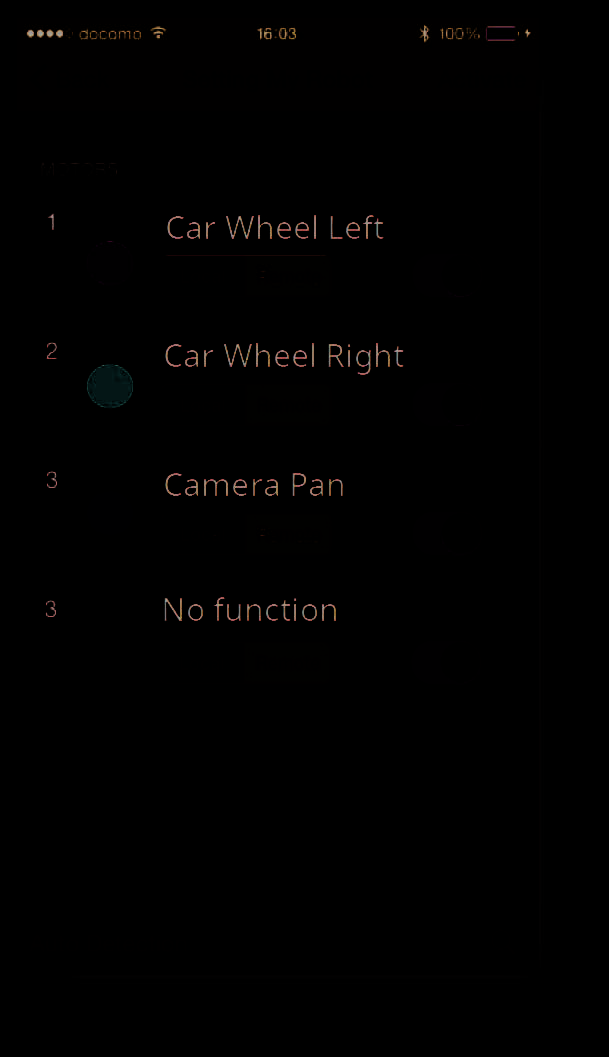
图5展示了使用电机模块构建远程临场机器人的快速原型设计方法。该机器人配备了4个电机模块,其中2个电机模块被分配用于云台摄像功能,另外2个被分配用于车轮功能。图6展示了具有图形用户界面的简易智能手机应用程序,可用于为多个电机分配不同功能。
多电机控制不仅可以通过智能手机应用程序进行编程,还可以通过软件开发工具包(SDK)实现。我们计划将SDK作为开源代码提供,以支持智能手机应用程序开发以及Arduino或树莓派等单板计算机的编程。
III. 结果
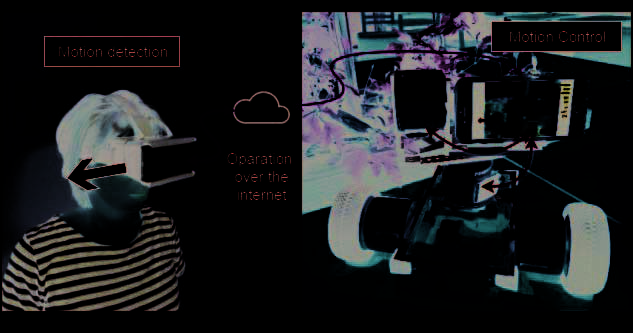
我们开发了一款简易智能手机应用程序,可用于控制电机模块构成的汽车或摄像机器人。这些功能可以通过智能手机应用程序轻松安装,无论是在组装前还是组装后都无需编程。此外,该应用程序还具有基于网页实时通信(WebRTC)的点对点实时通信功能。图7展示了通过互联网对远程临场机器人进行远程操作的情况。
此应用程序只是电机模块系统的一个示例。
IV. 未来的挑战
我们项目的目标是让没有技术知识的人也能比以往更快地进行专业的快速原型制作。为了实现这一目标,我们提出了以下三个未来问题。
首先,我们必须考虑一个重要问题,即多电机控制需要时间同步或协同控制,尤其是在高速移动或多轴机械手等工业或精密控制应用中。传统电机控制系统相对容易实现多电机同步控制,因为单个中央控制器通过有线方式计算并发送所有信号至多个电机,并与之通信。智能电机模块系统不仅使用有线通信,还采用蓝牙低功耗等通用无线遥控协议。在数值目标方面,我们的目标是即使在无线通信条件下,当多个电机(超过4个)进行协同运动时,最大响应时间也能控制在5毫秒以内。
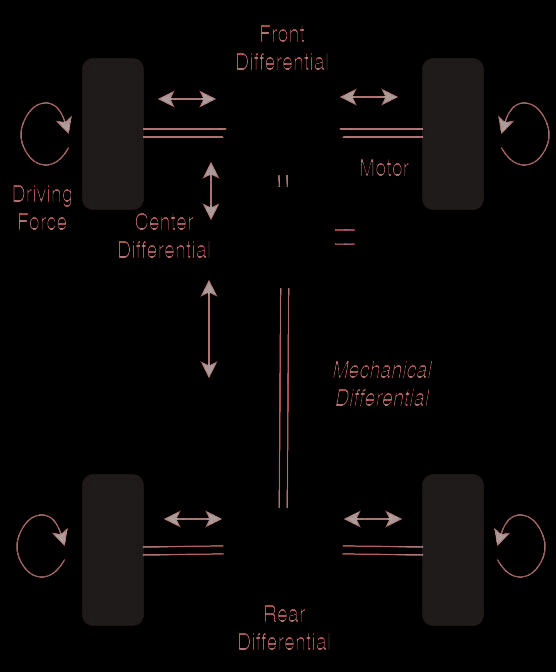
其次,如果每个电机都能检测其扭矩或反作用力,系统便可以单独控制驱动力的分配。图8显示了传统的汽车差速器,它可以通过机械方式经由各轴和齿轮分配驱动力。但这种机械差速器只能根据预定的机械条件(如齿轮比)来分配驱动力。
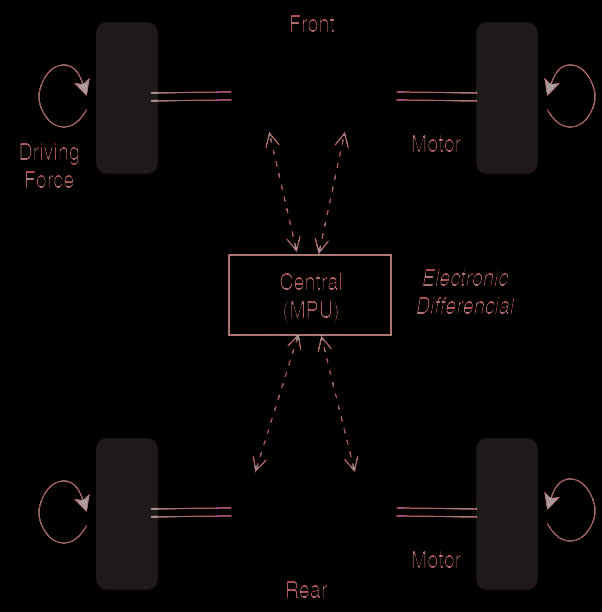
图9展示了由智能电机模块系统实现的电差速器。电子差速器可以通过检测输出轴的反作用力来动态控制驱动力。因此,我们可以根据路面状况优化每个驱动力。精确扭矩检测方法是与此相关的另一个问题。
第三,需要更直观的图形用户界面(GUI)来实现电子差速器,以设置灵敏度或参数,并可视化多个电机的功能。我们计划通过个人计算机或智能手机应用程序开发该图形用户界面(GUI)。
V. 结论
当前研究展示了使用智能电机模块的新原型设计方法。由于具有以下优势,该方法加快了服务机器人开发中的原型制作过程。
- 集成的电机控制系统
- 体积紧凑,如同伺服电机
- 由于采用无线通信,组装时无空间限制
- 机器人的功能和形态在组装后仍可重新配置
我们计划明年春天(2017年)将智能电机模块系统作为商业产品发布,如图10所示。我们将其命名为“凯根电机”。
此外,我们还将开发一个完整的开源硬件框架,以便快速、简便地制造和组装机器人结构。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









