









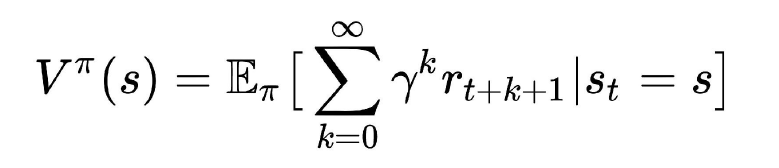
价值函数定义为

带入 R 的定义:
角标
π
\pi
π 说明,所有状态的价值依赖于 agent 采取的策略。这是显然的,如果agent 永远不动,那么所有状态的价值都是 0,假设环境不会自己变化。
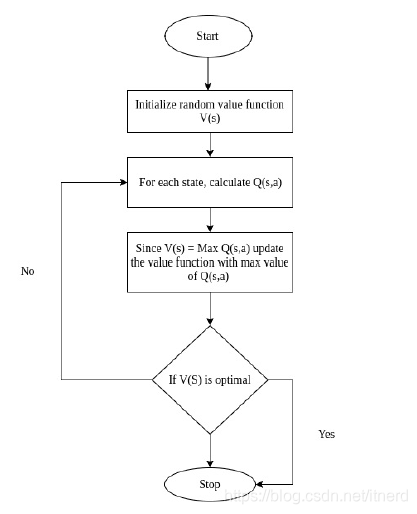
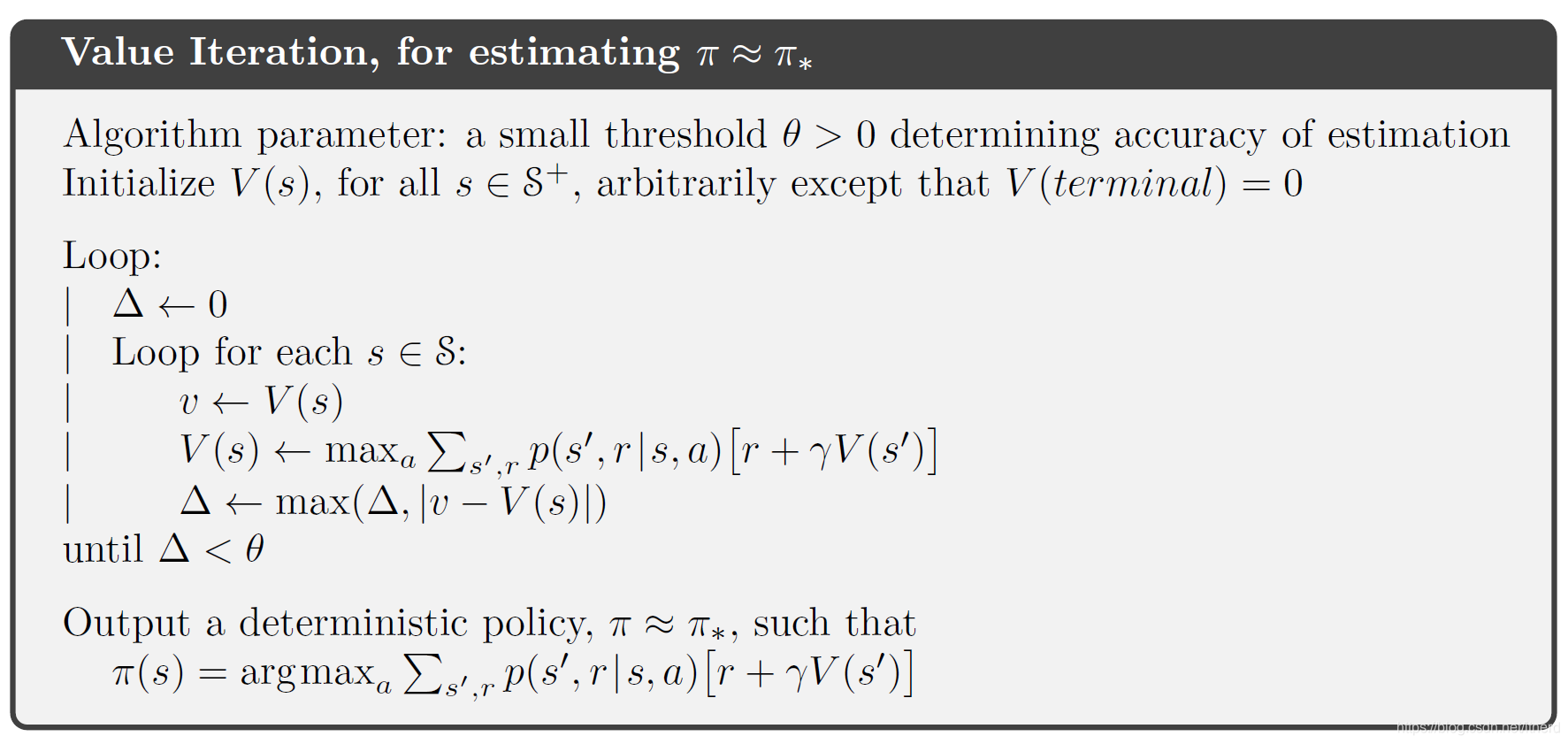
要求到最优的策略,先找最优的价值评估。
借助于价值函数的贝尔曼方程:

用迭代的方式求解出任意 策略
π
\pi
π 对应的价值函数。
最优的策略,就是每一步都选择价值最大的下一个状态。
import gym
import numpy as np
env = gym.make('FrozenLake-v0')
def value_iteration(env, gamma = 1.0):
value_table = np.zeros(env.observation_space.n) #随机初始化
no_of_iterations = 10000 #最大迭代次数
threshold = 1e-7 # 允许误差上限
for i in range(no_of_iterations):
updated_value_table = np.copy(value_table) #上一次迭代的价值函数
for state in range(env.observation_space.n): #对每一个状态
Q_value = [] # 记录每一个动作对应的 Q(s,a),因为 V = max_a Q(s,a)
for action in range(env.action_space.n):
next_states_rewards = []
for next_sr in env.P[state][action]: # 由于环境是随机的
trans_prob, next_state, reward_prob, _ = next_sr
next_states_rewards.append((trans_prob * (reward_prob + gamma *
updated_value_table[next_state])))
Q_value.append(np.sum(next_states_rewards)) # 所有可能下一状态的价值的加权和
value_table[state] = max(Q_value) # V = max_a Q(s,a)
if (np.sum(np.fabs(updated_value_table - value_table)) <= threshold):
print('Value-iteration converged at iteration# %d.' % (i + 1))
break
return value_table
def extract_policy(value_table, gamma = 1.0):
policy = np.zeros(env.observation_space.n)
for state in range(env.observation_space.n): # 对每一个状态
Q_table = np.zeros(env.action_space.n)
for action in range(env.action_space.n): # 对每一个动作
for next_sr in env.P[state][action]:
trans_prob, next_state, reward_prob, _ = next_sr
Q_table[action] += (trans_prob * (reward_prob + gamma *
value_table[next_state]))
policy[state] = np.argmax(Q_table)
return policy
optimal_value_function = value_iteration(env=env,gamma=1.0)
optimal_policy = extract_policy(optimal_value_function, gamma=1.0)
print(optimal_policy)


















 1223
1223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











