






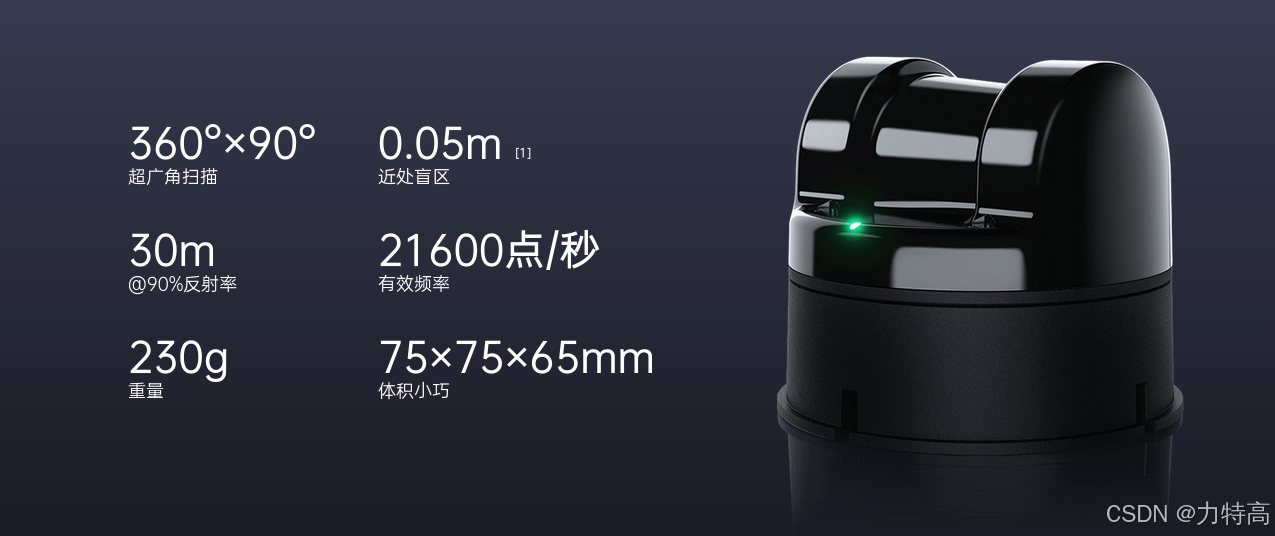
因为工作中低成本三维空间扫描的需求,在同事偶尔推荐下知道了宇树L1这款激光雷达,不得不说小巧的设计,0.05m的最小测距距离,360°*90°的FOV,以及最最最重要的1600多的价格无一不打动我。于是行动起来联系厂家,首先是想试用(白嫖)一下,然鹅被告知“雷达已经发布很久了,淘宝上就有销售,不提供试用服务”。确实有道理,咱又不缺(这点)钱,于是提了采购申请。。。
发货速度很快,采购下单当天,卖家就发货了,杭州到上海发的顺丰,次日达。中间有点小插曲是买来的第一台雷达坏了,中转板上电后都不亮灯,联系商家,商家给了技术人员的企业微信号,联系上之后视频了一下,看了一下判定是坏了,发了一条消息给我让我截图给商家退货,后续就比较顺利了,给换了新雷达。
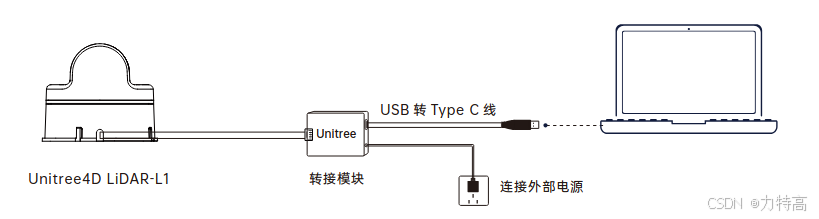
新雷达到货后简单连接上,毫无疑问亮灯了,改动编译了一下ROS2的驱动包,测了一下,拿到了点云数据,比较重要的参数就是'cloud_scan_num': 3000,这个参数的含义是用多少个scan拼接一帧点云,计算下来scan的频率是180hz,诸位看官可以根据自己的需要进行拼接。
雷达接口默认是/dev/ttyUSB0,需要给执行权限。如果ttyUSB0被占用了就会连接不上(如果你的电脑上有两个以上的ttyUSB设备,你一定会遇到这情况),且每次要给这个接口赋权限也挺烦···于是给宇树的设备指定了一个独有的别名,我这边用的是DRIVERS这个关键词作为宇树L1的唯一标识符(如果在您还有其他KERNEL==\"ttyUSB*\",SUBSYSTEM==\"tty\",DRIVERS==\"cp210x\的设备可以换一下唯一标识符),用sudo权限跑一下这个脚本就将宇树L1的接口绑定到 ‘/dev/unitreeL1’,且赋权777(可读可写可执行),将launch文件里修改 {'port': '/dev/unitreeL1'},
# please run the script with sudo
echo "-----------------------------------------------------"
echo "Begin to config unitree L1 lidar"
cd /etc/udev/rules.d
rm -rf 69-unitreeL1.rules
touch 69-unitreeL1.rules
echo "KERNEL==\"ttyUSB*\",SUBSYSTEM==\"tty\",DRIVERS==\"cp210x\", MODE:=\"0777\",GROUP:=\"dialout\", SYMLINK+=\"unitreeL1\"" >> 69-unitreeL1.rules
echo "Finish config the unitree L1, please reboot the computer"
echo "~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~"
需要注意一下数据不是实时的,每一帧数据都是过去一段时间的scan的拼接。
有点可惜的是这款雷达可能难以满足我们的使用要求,说一下存在的问题:
1.SDK开放的接口太少,除了拿数据的必要接口就只有一个跑马灯了;
2.设备可控性不强,可以将设备的状态从normal和standby之间切换,但是standby切换normal要10s左右且不稳定;
3.SDK说明不明确,例如指令下发要sleep一些时间,但是在SDK说明手册里是没有的,遇到了这个问题后我看了例程才知道需要睡眠,咨询技术支持也没有得到很好的解答,只说跟着例程走
4.不能触发式获取点云数据(起码技术支持是这样跟我说的),normal工作模式下就会持续尝试拼接点云数据,这个主要是在我们的使用要求下难以使用(3000scan为一帧),是不是一个缺点看应用场景吧;
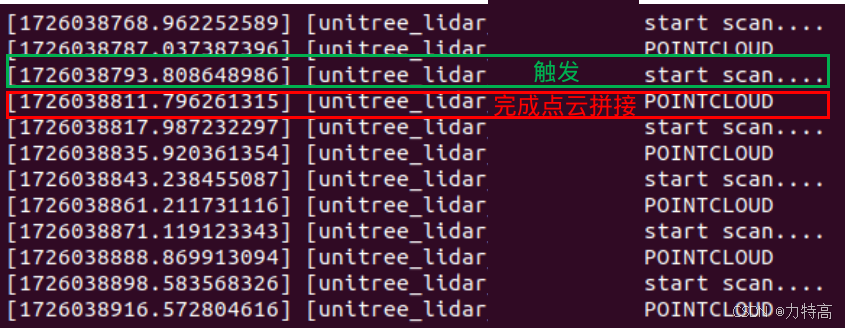
这里更新一下信息,从实际表现而言,在runParse的时候才会尝试拼接点云,我是用3000scan拼接一帧,雷达是182scan/s,则一帧的拼接时间为16.5s,我中途操作了一次LED等需要睡眠1s,那么一次采集的时间大约为17.5s,log打印与这个时间能够匹配得上。
5.最最最大的问题是雷达启动后要十几分钟的热机时间,在这期间随着开机时间变长,激光雷达的测距距离会持续变短,开机十几分钟后雷达数据会稳定这个说法我没有进行验证,但是开机20分钟后和刚开机时相比,激光雷达的测距变小了50mm@3300mm,当然这个问题也没有在产品说明手册里进行声明,是我的应用场景要测试天花板的高度,非常明显地能够看到这个趋势。by the way,刚开机的数据更接近实际值 -_-!
| 记录时间 | 测量值(mm) |
| 15:01 | 3280 |
| 15:03 | 3273 |
| 15:05 | 3267 |
| 15:07 | 3262 |
| 15:10 | 3250 |
| 15:15 | 3237 |
| 15:20 | 3231 |
如果要用到项目上,工程实现方面可能还要考虑的更多,如物理接口形式,震动抑制,防水防尘处理等。
期待二代能够解决一些问题吧,毕竟这价格实在太香了,保持关注····

















 1306
1306

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









