 ORB_SLAM2编译与优化:问题解决与改进
ORB_SLAM2编译与优化:问题解决与改进




一.编译算法.
安装过程全部来自于官方开源代码,具体安装过程不再阐述:
 https://github.com/raulmur/ORB_SLAM2
https://github.com/raulmur/ORB_SLAM2二.编译时遇到的问题
1.compile error:usleep was not declared in this scope
这是缺少头文件导致的。有10几个文件都缺,通过报错信息找到这些文件,添加头文件。
#include <unistd.h>2.Pangolin could not be found because dependency Eigen3 could not be found.
Pangolin版本的问题,不需要重新安装Pangolin及Eigen,修改CMakeLists.txt如下:在find_package(Eigen3 REQUIRED)后加NO_MUDULE
find_package(Eigen3 REQUIRED NO_MODULE)总的来说没有遇见太多问题。
三.
运行orb-slam2算法需要标定相机参数。我按照一位博主的方法进行标定,然后修改参数文件。参考:
ORB-SLAM2调用OAK-D双目摄像头进行点云建图_A. hyh的博客-优快云博客
用oak-D双目相机实现ORB-SLAM2双目实例-优快云博客
以下是我的运行参数:
%YAML:1.0 #-------------------------------------------------------------------------------------------- # Camera Parameters. Adjust them! #-------------------------------------------------------------------------------------------- # Camera calibration and distortion parameters (OpenCV) Camera.fx: 804.9215698242188 Camera.fy: 804.9215698242188 Camera.cx: 640.6663818359375 Camera.cy: 362.4100036621094 Camera.k1: 0 Camera.k2: 0 Camera.p1: 0 Camera.p2: 0 Camera.width: 1280 Camera.height: 720 # Camera frames per second Camera.fps: 20.0 # stereo baseline times fx Camera.bf: 60.438729354619866 # Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale) Camera.RGB: 1 # Close/Far threshold. Baseline times. ThDepth: 35 #-------------------------------------------------------------------------------------------- # Stereo Rectification. Only if you need to pre-rectify the images. # Camera.fx, .fy, etc must be the same as in LEFT.P #-------------------------------------------------------------------------------------------- LEFT.height: 720 LEFT.width: 1280 LEFT.D: !!opencv-matrix rows: 1 cols: 5 dt: d data: [-9.900439262390137, 96.50916290283203, 0.0009822448482736945, -0.00023291604884434491] LEFT.K: !!opencv-matrix rows: 3 cols: 3 dt: d data: [804.9215698242188, 0.0, 640.6663818359375, 0.0, 804.9215698242188, 362.4100036621094, 0.0, 0.0, 1.0] LEFT.R: !!opencv-matrix rows: 3 cols: 3 dt: d data: [0.9999611377716064, -0.006486319005489349, -0.005967340432107449, 0.006491821724921465, 0.9999785423278809, 0.0009032952948473394, 0.005961353424936533, -0.0009419990819878876, 0.9999817609786987] LEFT.P: !!opencv-matrix rows: 3 cols: 4 dt: d data: [804.9215698242188, 0.0, 640.6663818359375, 60.438729354619866, 0.0, 804.9215698242188, 362.4100036621094, 0.0, 0.0, 0.0, 1.0, 0.0] RIGHT.height: 720 RIGHT.width: 1280 RIGHT.D: !!opencv-matrix rows: 1 cols: 5 dt: d data: [-9.900439262390137, 96.50916290283203, 0.0009822448482736945, -0.00023291604884434491] RIGHT.K: !!opencv-matrix rows: 3 cols: 3 dt: d data: [806.0142211914062, 0.0, 664.4835205078125, 0.0, 806.0142211914062, 370.78265380859375, 0.0, 0.0, 1.0] RIGHT.R: !!opencv-matrix rows: 3 cols: 3 dt: d data: [0.9999005794525146, -0.005074762273579836, 0.013157090172171593, 0.005086900200694799, 0.9999866485595703, -0.0008892129990272224, -0.013152401894330978, 0.0009560533799231052, 0.9999130368232727] RIGHT.P: !!opencv-matrix rows: 3 cols: 4 dt: d data: [806.0142211914062, 0.0, 664.4835205078125, 60.438729354619866, 0.0, 806.0142211914062, 370.78265380859375, 0.0, 0.0, 0.0, 1.0, 0.0] #-------------------------------------------------------------------------------------------- # ORB Parameters #-------------------------------------------------------------------------------------------- # ORB Extractor: Number of features per image ORBextractor.nFeatures: 1200 # ORB Extractor: Scale factor between levels in the scale pyramid ORBextractor.scaleFactor: 1.2 # ORB Extractor: Number of levels in the scale pyramid ORBextractor.nLevels: 8 # ORB Extractor: Fast threshold # Image is divided in a grid. At each cell FAST are extracted imposing a minimum response. # Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST # You can lower these values if your images have low contrast ORBextractor.iniThFAST: 20 ORBextractor.minThFAST: 7 #-------------------------------------------------------------------------------------------- # Viewer Parameters #-------------------------------------------------------------------------------------------- Viewer.KeyFrameSize: 0.05 Viewer.KeyFrameLineWidth: 1 Viewer.GraphLineWidth: 0.9 Viewer.PointSize: 2 Viewer.CameraSize: 0.08 Viewer.CameraLineWidth: 3 Viewer.ViewpointX: 0 Viewer.ViewpointY: -0.7 Viewer.ViewpointZ: -1.8 Viewer.ViewpointF: 500
四. 运行
1.运行相机,使用depthai-ros。具体教程也参考OAK中国的官方。
cd your_ws
source devel/setup.bash
roslaunch depthai_examples stereo_node.launch2.运行orb-slam2算法,这里我先运行双目建图模式。
3.运行效果
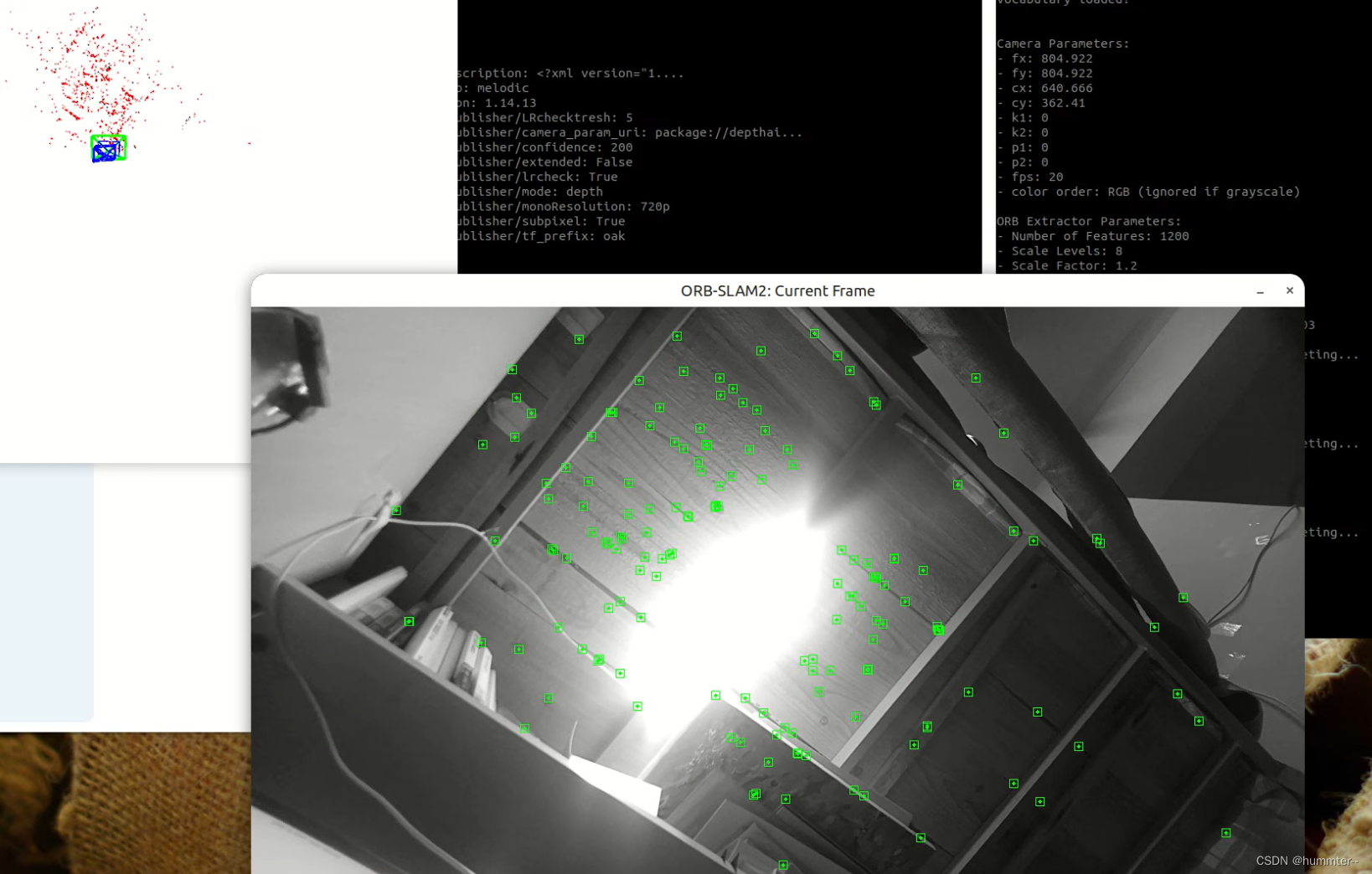
总结:
运行效果一般,还是存在特征点容易丢失的问题。感觉还是标定有问题,标定应该有待改进。
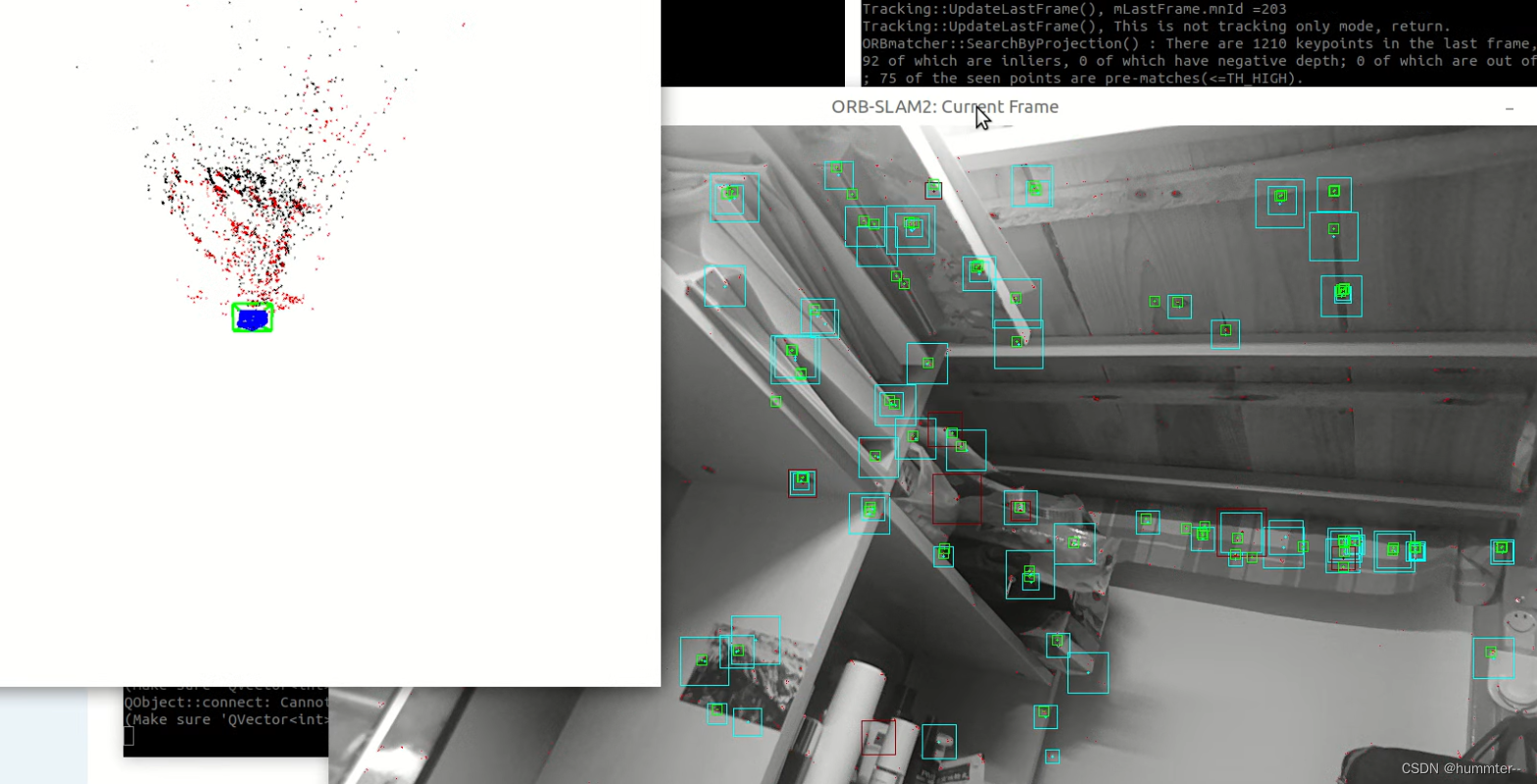
五.另外一个改进后的orb-slam2算法
这位的算法效果要好一些,并且不容易丢失,带有保存地图的功能。安装过程和运行过程和官方都是一样的。
运行效果
六.稠密建图
使用高翔博士的算法,具体安装过程参考这位
高翔ORB-SLAM2稠密建图编译(添加实时彩色点云地图+保存点云地图)_高翔orb_slam2稠密建图编译-优快云博客
安装算法后跑数据集没有问题,运行效果如下:

但是使用oak相机跑rgb模式,没有点云,还在解决中.......


















 555
555

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









