






#include <iostream>
#include <math.h>
#include <Eigen/Core>
#include <Eigen/Geometry>
using namespace std;
#define PI 3.1415926535897932346f
int main(int argc, char** argv)
{
//3D旋转矩阵 定义为单位阵
Eigen::Matrix3d rotation_matrix = Eigen::Matrix3d::Identity();
//定义旋转向量 沿着z轴旋转45度
Eigen::AngleAxisd rotation_vector(PI / 4, Eigen::Vector3d(0, 0, 1));
// 隐含了 一个变换 angleaxisd
/*
* 旋转向量 --> 旋转矩阵
* 旋转向量 --> 旋转矩阵 ---> 欧拉角
* 旋转向量 --> 四元数
*/
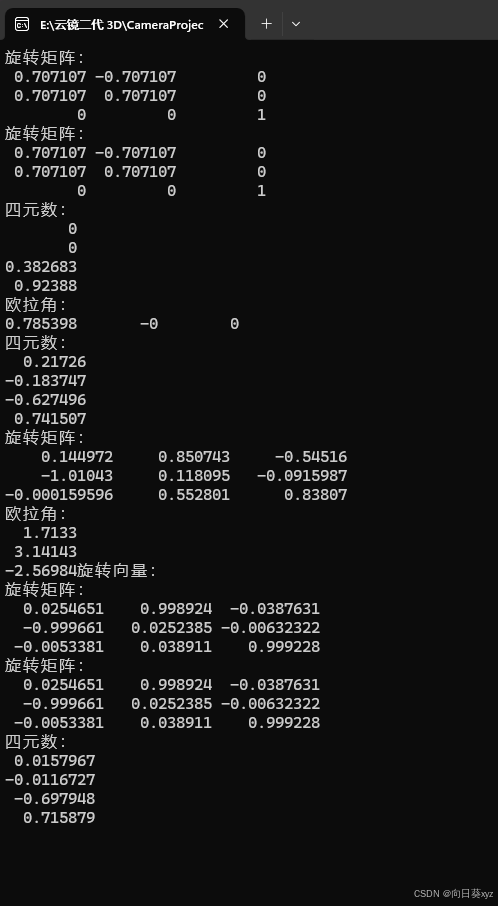
cout << "旋转矩阵:" << endl;
cout << rotation_vector.matrix() << endl; //..............................rotation_vector to rotation_matrix(1)
//旋转向量--->旋转矩阵
rotation_matrix = rotation_vector.toRotationMatrix();
cout << "旋转矩阵:" << endl;
cout << rotation_matrix << endl; //...............................rotation_vector to rotation_matrix(2)
//旋转向量--->旋转矩阵
Eigen::Quaterniond q = Eigen::Quaterniond(rotation_vector); //....................rotation_vector to Quaterniond
cout << "四元数:" << endl;
cout << q.coeffs() << endl; // (x,y,z,w)
//旋转向量--->四元数
/*
* 旋转矩阵 --> 旋转向量
* 旋转矩阵 ---> 欧拉角
* 旋转矩阵 ---> 四元数
*/
rotation_vector = rotation_matrix; // ..................................rotation_matrix to rotation_vector
//旋转矩阵--->旋转向量
Eigen::Vector3d euler_angles = rotation_matrix.eulerAngles(2, 1, 0); //.......rotation_matrix to euler_angles .........attention: ypr
cout << "欧拉角:" << endl;
cout << euler_angles.transpose() << endl; // ypr
//旋转矩阵--->欧拉角
// Eigen::Matrix3d rotation_matrix123 = Eigen::Matrix3d::Identity();
/* rotation_matrix << 0.22544, -0.929073, -0.2932,
0.969474, 0.243721, -0.02682,
0.096397, -0.27824, 0.95565;*/
rotation_matrix << 0.194132, 0.97217, -0.131,
-0.889, 0.1179, -0.442,
0.414, 0.2024, 0.8873;
q = Eigen::Quaterniond(rotation_matrix); // .......................................rotation_matrix to Quaterniond
cout << "四元数:" << endl;
cout << q.coeffs() << endl; // (x,y,z,w)
//旋转矩阵--->四元数
/*
* 四元数--->旋转矩阵
* 四元数--->旋转矩阵 --->欧拉角
* 四元数--->旋转向量
*/
cout << "旋转矩阵:" << endl;
cout << q.toRotationMatrix() << endl; // .............................................Quaterniond to rotatin_matrix
//四元数--->旋转矩阵
cout << "欧拉角:" << endl;
cout << q.toRotationMatrix().eulerAngles(2, 1, 0); //......................................Quaterniond to rotatin_matrix to euler_angles ....attention: ypr
//四元数--->旋转矩阵--->欧拉角
cout << "旋转向量:" << endl;
rotation_vector = q; // ..................................Quaterniond to rotation_vector
//四元数--->旋转向量
/*
* 都是因为定义的不同,存在隐式转换,
* Eigen::Matrix3d rotation_matrix, Eigen::AngleAxisd rotation_vector,Eigen::Quaterniond q
* 欧拉角 ---> 旋转向量
* 欧拉角 ---> 旋转矩阵
* 欧拉角 ---> 四元数
*
* 按照rpy旋转
* tran.rotate(Eigen::AngleAxisf(FLAGS_roll / 180.0 * M_PI, Eigen::Vector3f::UnitX()) *
Eigen::AngleAxisf(FLAGS_pitch / 180.0 * M_PI, Eigen::Vector3f::UnitY()) *
Eigen::AngleAxisf(FLAGS_yaw / 180.0 * M_PI, Eigen::Vector3f::UnitZ()));
*/
// Eigen::AngleAxisd rollAngle(Eigen::AngleAxisd(euler_angles(2),Eigen::Vector3d::UnitX()));
// Eigen::AngleAxisd pitchAngle(Eigen::AngleAxisd(euler_angles(1),Eigen::Vector3d::UnitY()));
// Eigen::AngleAxisd yawAngle(Eigen::AngleAxisd(euler_angles(0),Eigen::Vector3d::UnitZ()));
Eigen::AngleAxisd rollAngle(Eigen::AngleAxisd(0.362569 / 180.0 * PI, Eigen::Vector3d::UnitX()));
Eigen::AngleAxisd pitchAngle(Eigen::AngleAxisd(-2.22152 / 180.0 * PI, Eigen::Vector3d::UnitY()));
Eigen::AngleAxisd yawAngle(Eigen::AngleAxisd(-88.5397 / 180.0 * PI, Eigen::Vector3d::UnitZ()));
rotation_matrix = rollAngle * pitchAngle * yawAngle;//................euler_angles to rotation_matrix
cout << "旋转矩阵:" << endl;
cout << rotation_matrix << endl;
rotation_vector = rollAngle * pitchAngle * yawAngle;//................euler_angles to rotation_vector
cout << "旋转矩阵:" << endl;
cout << rotation_vector.matrix() << endl;
q = rollAngle * pitchAngle * yawAngle;//................euler_angles to Quaterniond
cout << "四元数:" << endl;
cout << q.coeffs() << endl;
}


















 934
934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











