







自动生成关键点参数:
在处理大量点云的时候,人为手动设置参数![]() 势必会严重影响处理速度。
势必会严重影响处理速度。
因此,分析点云,自动判断哪些点相对更有独特性,然后基于此计算出关键点的参数。用下面的公式对点云的点进行排序

其中![]() 是临近点集的点数,
是临近点集的点数,![]() 由式(13~15)分别计算得到。参考文章Coarse Alignment for Model Fitting of Point Clouds Using a Curvature-Based Descriptor解读四选择特征点ethod。因为
由式(13~15)分别计算得到。参考文章Coarse Alignment for Model Fitting of Point Clouds Using a Curvature-Based Descriptor解读四选择特征点ethod。因为![]() 所以如果
所以如果![]() 或者
或者![]() 则F=0,代表一个非常特殊的点。F=1/3,意味着
则F=0,代表一个非常特殊的点。F=1/3,意味着![]() ,意味着这是F的最大值。不是唯一点。
,意味着这是F的最大值。不是唯一点。
通过对点云中的每个点按照公式![]() 的值从低到高进行排序。我们可以选择k个最低值的点,作为关键点。即:
的值从低到高进行排序。我们可以选择k个最低值的点,作为关键点。即:
![]()
其中k是自定义的值。为了从Y点云采集到与点云X相同类型的关键点,的到与![]() 相同的结果:
相同的结果:
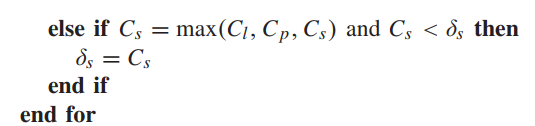
为此,执行以下算法:
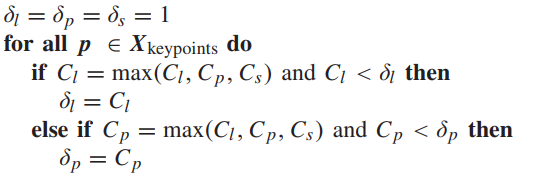
其中![]() 是点云X中最低s中的k个点上述伪代码中的算法快速的将关键点分为三组,是
是点云X中最低s中的k个点上述伪代码中的算法快速的将关键点分为三组,是![]() 分别为最大时的点集,这个算法对每一组的
分别为最大时的点集,这个算法对每一组的![]() 进行检测,如果
进行检测,如果![]() 值较小,则赋值给对应的
值较小,则赋值给对应的![]() 。
。
这样就可以对![]() 进行设置。可以替代手动设置参数。可以用在观测点云Y中选取关键点。但是
进行设置。可以替代手动设置参数。可以用在观测点云Y中选取关键点。但是![]() 不能从
不能从![]() 得到,依然依赖点云Y的点密度。然而,除非X跟Y的点云密度有显著差异,否则就可以设置X跟Y一样的
得到,依然依赖点云Y的点密度。然而,除非X跟Y的点云密度有显著差异,否则就可以设置X跟Y一样的![]() 。
。
下一篇,解读关键点新的描述的产生。是本文的重点创新



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









