







 该文介绍了如何验证ROS安装成功,通过启动小海龟仿真进行测试。接着,详细阐述了如何创建和配置ROS工作空间,包括src、build、devel和install目录。此外,还讲解了创建功能包的步骤,使用catkin_create_pkg命令并进行编译的过程。
该文介绍了如何验证ROS安装成功,通过启动小海龟仿真进行测试。接着,详细阐述了如何创建和配置ROS工作空间,包括src、build、devel和install目录。此外,还讲解了创建功能包的步骤,使用catkin_create_pkg命令并进行编译的过程。
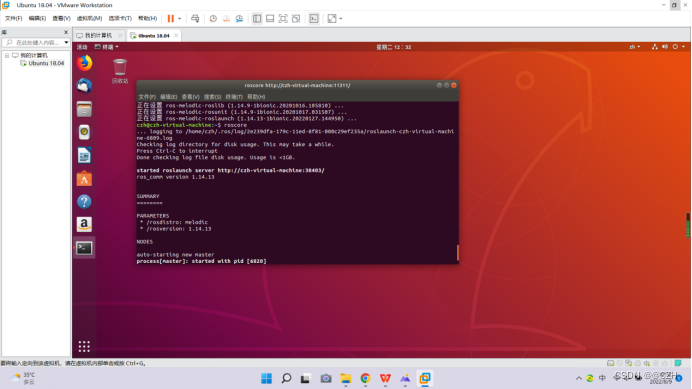
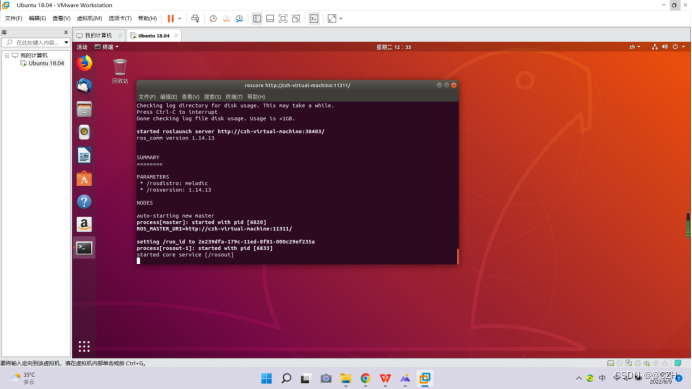
2.1启动第一个ROS例程——小海龟仿真,验证ROS是否安装成功
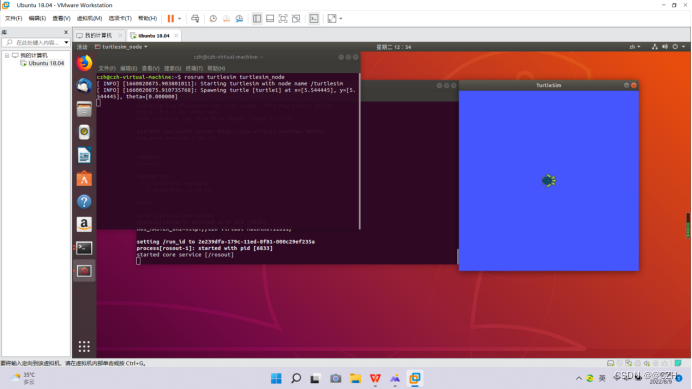
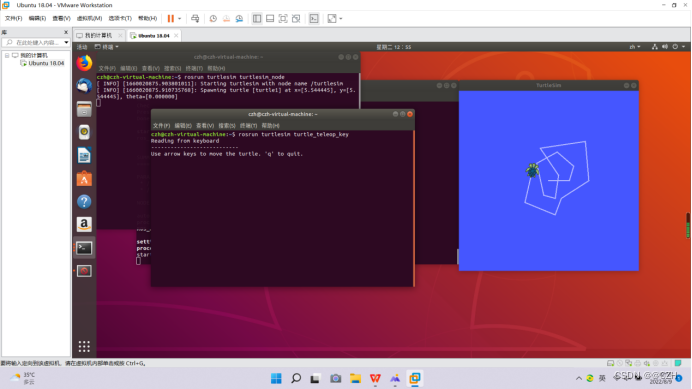
打开终端输入命令“roscore”启动ROS Master节点管理器,如果ROS安装成功,在终端中显示如图所示信息,打开一个新终端,输入命令“rosrun turtlesim turtlesim”启动turtlesim小海龟仿真器,会出现如图小海龟可视化仿真界面,再次打开一个新终端,输入命令“rosrun turtlesim turtle_teleop_key”运行键盘控制节点,此时便可通过键盘方向键控制仿真界面中小海龟的移动 。
2.2 创建工作空间
&n
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2438
2438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









