




前面通过对极约束估计了相机的 R,t,这一节通过三角测量可以恢复深度值,得到特征点的空间位置(估计值)
利用opencv进行三角测量的步骤:
1、定义旋转矩阵和平移向量组成的增广矩阵
2、计算特征点在两个坐标系下的归一化坐标(取前两维)
3、调用triangulatePoints,得到空间点的齐次坐标
4、归一化处理,取前三维作为空间点的非齐次坐标
需要注意的是:三角测量是由平移得到的,纯旋转是无法使用三角测量的,因为对极约束将永远满足。在平移存在的情况下,还要关心三角测量的不确定性,这会引出一个三角测量的矛盾
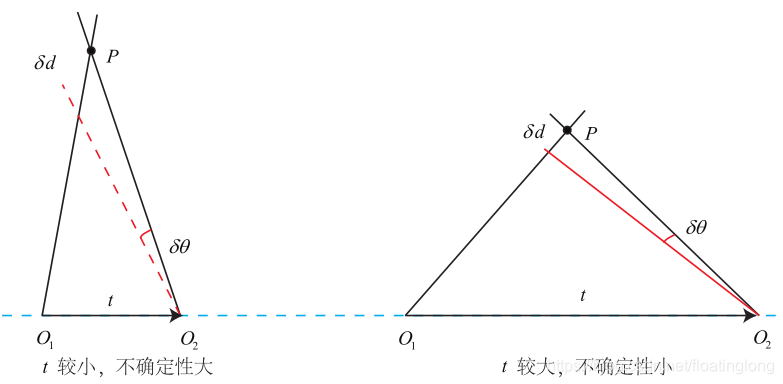
如果特征点运动一个像素 δx,使得视线角变化了一个角度 δθ,那么测量到深度值将有 δd 的变化。从几何关系可以看到,当 t 较大时,δd 将明显变小,这说明平移较大时,在同样的相机分辨率下,三角化测量将更精确
要增加三角化的精度,其一是提高特征点的提取精度,也就是提高图像分辨率——但这会导致图像变大,提高计算成本
另一方式是使平移量增大。但是,平移量增大会导致图像的外观发生明显的变化,比如箱子原先被挡住的侧面显示出来,比如反射光发生变化等等。外观变化会使得特征提取与匹配变得困难
因此出现了三角化的矛盾:平移增大,可能导致匹配失效;平移减小,三角化精度不够
#include <iostream>
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/opencv.hpp>
using namespace cv;
void OrbFeaturesMatch(const Mat &img1, const Mat &img2,
vector<KeyPoint> &kp1, vector<KeyPoint> &kp2,
vector<DMatch> &matches)
{
Mat desc1, desc2;
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> desc = ORB::create();
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce- 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









