






 本文介绍了一种简单的点云数据处理方法——直通滤波。通过设定坐标轴上的特定范围来过滤点云数据,可以有效地去除不需要的部分。文中详细展示了如何使用PCL库实现该滤波过程。
本文介绍了一种简单的点云数据处理方法——直通滤波。通过设定坐标轴上的特定范围来过滤点云数据,可以有效地去除不需要的部分。文中详细展示了如何使用PCL库实现该滤波过程。
直通滤波器非常简单实用,如果你不想要点云中的某一块儿,想把它砍掉,就直接设定某坐标轴上某范围,将范围以内或者以外的删除。
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
// 创建滤波器对象
pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud (cloud);//这个参数得是指针,类对象不行
pass.setFilterFieldName ("x");//设置想在哪个坐标轴上操作
pass.setFilterLimits (0.0, 1.0);//将x轴的0到1范围内
pass.setFilterLimitsNegative (false);//保留(true就是删除,false就是保留而删除此区间外的)
pass.filter (*cloud_filtered);//输出到结果指针
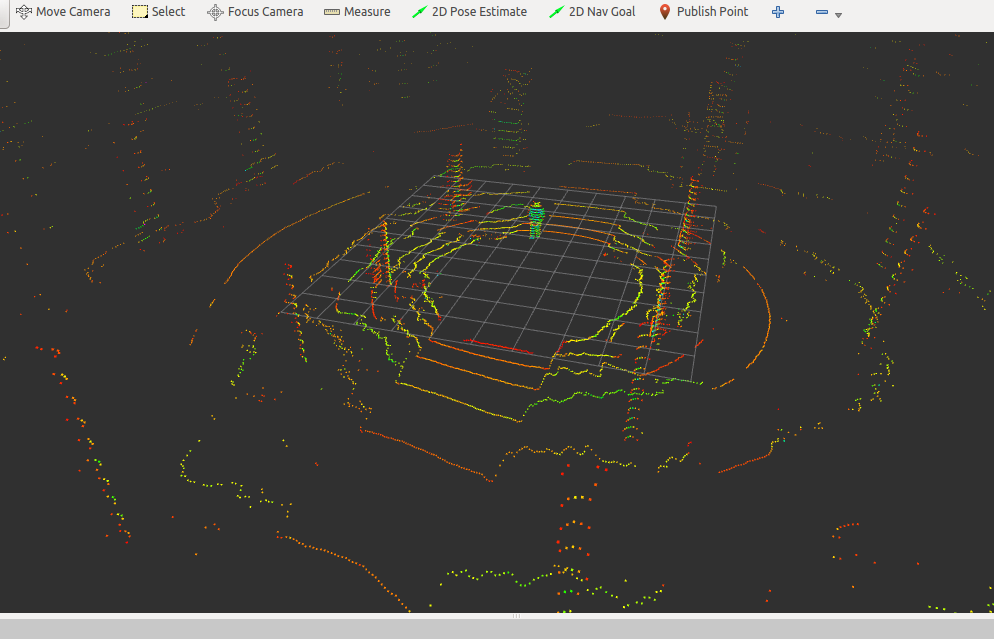
截取前:
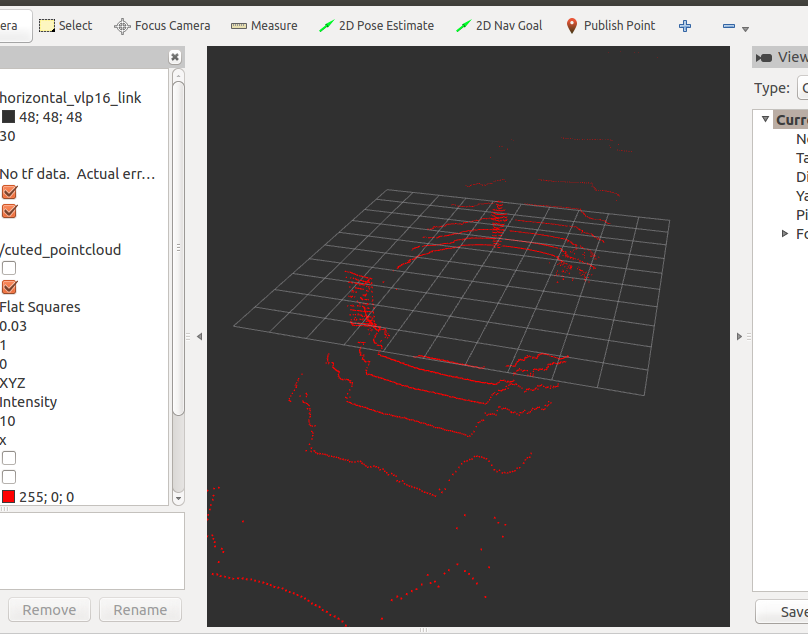
截取后:

















 381
381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









