



一种用于控制智能医疗应用中可穿戴传感器操作的动态互操作通信框架
摘要
在本文稿中,提出了一种用于调控可穿戴医疗设备操作的动态互操作通信框架(DICF)。该框架负责监测、决策以及控制可穿戴传感器(WS)的功能和运行时间,作为智能医疗跟踪应用的一部分。在此框架中,考虑了无线传感设备的特性及其内在特征,以设计出完全可操作且自动化无缝运行的传感设备。传感设备根据感知信息及患者观察到的身体状况,以自主和互联方式运行。其工作频率和时间间隔会根据互联设备通信框架所给出的计划性与随机建议而变化。该框架旨在提高设备的互操作性,使其适应不同跟踪医疗应用的动态特性,从而提升其性能。
引言
可穿戴传感技术是一种新兴医疗范式,融合了智能传感设备、通信技术和临床诊断的优势。该范式以成本效益高的方式提供可靠且稳健的健康监测服务,并减少人为干预。基于临床的健康传感器嵌入人体表面或体内,或集成于衣柜中,用于感知和监测生理变化[1,2]。可穿戴传感技术集成了柔性与可扩展电子芯片及设备、可互操作无线通信标准、传感器以及纳米技术特征,从而推动数字医疗数据分析取得更大进展。电子传感设备的设计特性使其能够适应各种身体表面,提供可靠的监测和信息感知精度。可穿戴设备的支持促进了智能医疗应用的发展,实现快速临床诊断和便捷的疾病预测,有助于满足患者及其他用户的医疗需求[3,4]。
可穿戴传感器(WS)是能够利用内置发射器与其他传感器和网络进行交互的小型计算电子设备。医疗保健传感器有多种类型,如心电图(ECG)、肌电图(EMG)、皮肤计(SG)、皮肤电极(SE)、热敏电阻(TH)心率变异性(HRV)等。这些传感器体积微小,放置于人体之上,专为特定的感知过程而设计。可穿戴传感器测量生理变化并调控人体功能。一个典型的例子是起搏器设备,它是一种用于调控心脏跳动的生物医学植入式传感器[5]。此外,这些设备通过驱动功能实现神经刺激,并监测高血压变化[6,7]。另一种典型的可穿戴传感器是智能手表,其配备有临床传感器,用于监测用户的血压[8]。血压、心率、血糖水平、温度和脉搏监测是生理传感设备测量的一些重要生命体征。通过感知信息,可在临床分析中预测人体的基本活动。用于临床目的的传感器必须符合行业和医疗标准,以提供可靠的信息。一些传感器规格作为示例列于表1中[9,10]。
可穿戴传感器的通信模块有助于将感知信息传输到医疗中心或诊断实验室以进行进一步分析。可穿戴传感器与智能手机或数字助理等智能手持设备进行通信。感知信息由智能设备收集,并转发至医疗中心。感知信息通过无线介质传输利用任何现有的通信技术标准。无线电单元采用短距离或长距离通信标准来传输信息。工作频率和所用带宽随所采用的标准而变化,这有助于提高可穿戴通信的互操作性。医疗传感器采用蓝牙、Zigbee、802.11等标准进行通信[11,12]。可穿戴通信的一个特定限制是由于微型设计导致的硬件和软件限制。智能设备或数据汇聚器在通信时需处理大量被感知的信息,这对于分析人体活动至关重要。因此,选择最优通信标准对于提高功耗和存储优化、实现可靠的数据传输速率十分必要[13,14]。
相关工作
杨等人[15]利用可穿戴传感器在诊断慢性健康疾病中的应用。通过引入基于纳米的优化,解决了设计灵活且可扩展的医疗应用的需求。作者还讨论了可穿戴传感技术的持续存在的挑战和技术现状。
安瓦里等人[16]提出了一种利用惯性测量单元(IMU)传感器对人体步行特性进行优化分析的方法。该方法识别传感器位置及解剖学上的足部位置,以实现传感器放置。通过最佳检测与放置,基于同步特征提取最大化步态分析效果。
埃尔法拉维等人[17]提出了一种由可穿戴贴片传感器辅助的低功耗无线呼吸监测系统。该监测系统旨在记录呼吸频率和咳嗽发生。该系统结合了微机电系统和多轴惯性传感器来记录音频信号。此外,数据处理和融合算法对传感器数值进行处理,以测量呼吸频率和咳嗽发生。
李和李设计了一种智能解释系统[18],以提高感知信息的准确性。通过使用手持式弯曲和压力可穿戴传感器监测手指的运动,实现更优的输入检测。基于支持向量机的传感器融合利用准确识别来提高解释精度。
曼齐等人[19]提出了一种活动识别系统,用于提高自定位机器人在医疗保健中的性能。通过分析异构数据、融合策略、摄像头输入和位置信息来改善人类活动识别。通过解释人手与机器人之间的信息来提高F值。
格雷科等人[20]利用边缘流技术来分析实时可穿戴传感器数据,以优化处理与内存利用。边缘流技术基于大数据范式,提供了架构与技术解决方案。多种技术被整合为单一架构,用于设计医疗物联网(IoMT)。
贾卢勒[21]讨论了用于观察患者步态综合征的可穿戴医疗技术的实现与解决方案。步态障碍通过从被感知信息中提取有用特征来进行分类。作者讨论了将传感器操作与临床分析相关联所面临的挑战。
桑切斯‐佩雷斯等人[22]将可穿戴传感器技术与机器学习相结合,用于分析帕金森病运动功能障碍。提出了一种由运动障碍协会支持的、基于统一帕金森病评定量表(MDS‐UPDRS)的静止震颤检测方法,该方法结合了模糊推理和可穿戴传感器,以提高量化速率。所提取的特征以递归方式用于量化,以满足临床需求。
移动生理传感器系统(MoPSS)由Leu等人提出[23],用于通过智能传感器感知和监控人体物理数据。这些传感器嵌入衣柜中,收集信息并传输到智能手机进行实时处理。智能手机将收集到的信息转发至医疗云,以进行进一步处理和存储。
Choi等人[24]提出了一种成本效益高的简约传感手套设计,以提高数据分析和处理的速度。为传感手套设计的姿态估计算法能够以更低的误差提高分析速率。
Dobkin和Martinez[25]回顾了可穿戴运动传感器在智慧医疗中对临床改善的影响。作者讨论了可穿戴传感技术在活动感知、步态分析、信号监测等方面用于识别行为改变和诊断的软硬件结合。
王和刘提出分层深度长短期记忆网络(H‐LSTM)[26],以提高人体活动检测的精度。传感器数据通过平滑和去离子化进行预处理措施。从处理后的数据中利用时频域提取特征。H‐LSTM对这些特征进行处理,用于分类传感器数据并识别活动。
动态互操作通信框架
DICF的设计重点在于合理化可穿戴传感器的操作和决策能力。通过DICF优化了传感器寿命、异构通信、存储限制、信号累积和决策等方面的问题。DICF的集中式工作特性提升了医疗应用[27]的性能,实现了可靠的结果。
可穿戴传感器网络模型
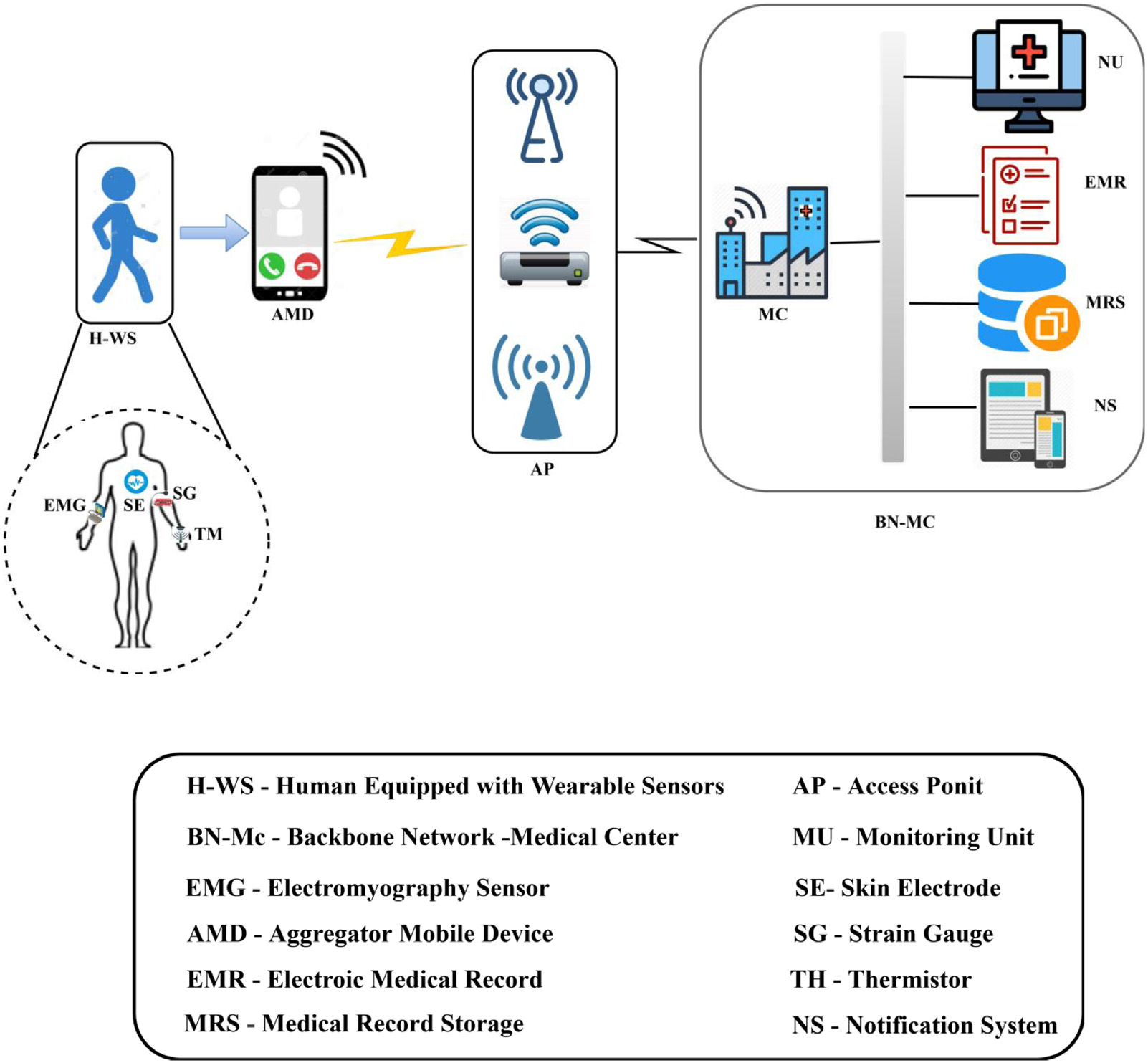
H‐WS与医疗中心(MC)辅助的骨干网络连接的模型表示如图1所示。为了便于理解,图中所示组件的描述和功能在[28]表2中进行了简要说明。
在本文稿中,H‐WS部分被建模为通过在三名受试者表面放置4个生物医学传感器(EMG、SE、SG和TH)进行的实验分析。受试者的年龄分别为24岁、43岁和62岁(男性),用于监测其体温、血压、心电图和肌肉活动。一部手持智能手机作为AMD,与位于患者1.5公里外的BN‐MC进行交互。在实验分析中,BN‐WC被配置为位于受试者住宅1.5公里外的接收站(住宅)。令sub1、sub2和sub3分别代表年龄为24岁、43岁和62岁的受试者。根据所执行的活动,在不同时间间隔观察传感器数值。为了评估,所考虑的活动为步行,

上下楼梯、躺下和站立。在表3中,给出了上述各项活动对于放置的传感器的感知需求(是(Y)/否(N))[29]。
所提出的框架针对表2中提到的活动进行了增强。DICF框架每个部分的所有观测均集中于上述活动。上述传感器操作被三个受试者统一采用。
所提出的框架
DICF在H‐WS和BN‐MC之间实现,作为增强型医疗应用性能优化[30]。该框架旨在改善H‐WS/BN‐MC网络中的监测、决策和传感器操作特性。上述三个过程依赖于传感器节点的功能及其值,如感知与监测过程和传输。
感知与监测过程
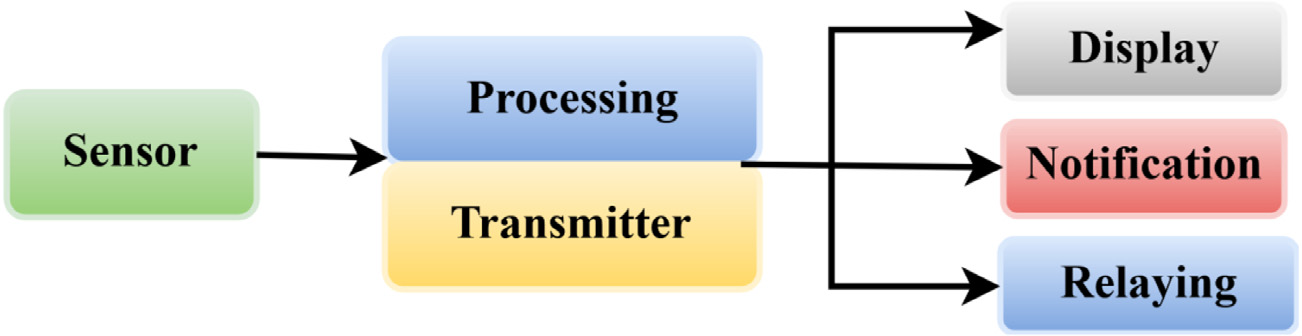
在图2中,表示了监测的操作。
可穿戴传感器配备有无线电发射器,用于与AMD进行交互。它还具有临时存储器,用于处理感知信号[31]。感知信息(I)由四个元组(i1,i2,i3,i4)组成,依次对应EMG、SE、SG和TH传感器的值。I以周期性间隔传输到AND。这些元组的周期性间隔随设备和人体的感知时间而变化。例如,EMG的感知时间最短为30分钟,最长为90分钟,因此一天内的感知会话次数为24×60/30到24×60/90=48至16次。在每次会话完成后,I会被更新并传输至AMD。AMD具备显示、通知和中继能力。该信息通过软硬件功能集成在AMD上弹出显示。会话采用两种感知类型:周期性的(由操作时间确定)和事件检测。周期性的感知与监测过程遵循一种确定模式,如下所述:
设{s1,s2,…,sn}为某个元组的会话,其平均值savg为∑nj=1sj/n。该值根据i1、i2、i3和i4的运行时间独立确定。因此,AMD在24小时天长内接收的总更新次数为max{savg(i)}、i=1、2、3、4。这意味着AMD在所有这些间隔内接收max{savg(i)}次更新,并向BN‐MC发送I。相反,如果传感器传输的是异常值,则si和savg的更新间隔不再成立。显然,如果感知信息超出传感器的正常范围(如表1所示),则表示检测到事件。当可穿戴设备感知到的数值超出或低于正常范围时,表明出现紧急情况。该事件检测间隔(es)通过公式(1)计算得出
$$
e_s = \left\lceil \frac{|s_j - s_{avg}|}{s_{avg}} + 1 \right\rceil \tag{1}
$$
这里,sj < es ≤ sj+1 表示 es 在周期性或相同间隔后发生。如果savg > |sj|,则会估算出需要进行无缝监测和诊断的参考点。因此,AMD已发起紧急通知和优先传输,并通过硬件通知紧急事件

且软件应用使用不同的声音进行模型。在两者中周期性的和事件检测的感知与监测过程,AMD将I传输到BN‐MC,而无需终端用户/患者授权。在es中检测到的事件由本地机器学习算法进行早期诊断和急救建议。该机器学习在事件检测后进入预测状态。对于所考虑的元组,存在44种可能的感知值情况,介于所有I∈正常范围(和)所有I∉正常范围(超出/低于)之间。通过三个受试者观察到的周期性间隔与紧急通知之间的差异总结于表4。
关于间隔4到48的平均值26,三个受试者的偏差如表4所示。所需平均间隔为+与周期性间隔的偏差。这些间隔会根据受试者的活动而发生变化。在
表4 周期性间隔和紧急通知
| 间隔 | Sub1 | Sub2 | Sub3 |
|------|------|------|------|
| 4 | 4 | 4 | 3.59 |
| 8 | 7.6 | 8 | 8 |
| 12 | 10.4 | 11.2 | 12 |
| 16 | 16 | 14.53| 12.44|
| 20 | 20 | 20 | 20 |
| 24 | 22.13| 24 | 23 |
| 28 | 28 | 27.1 | 28 |
| 32 | 32 | 32 | 32 |
| 36 | 35.2 | 36 | 36 |
| 40 | 39.4 | 40 | 40 |
| 44 | 43.4 | 41.36| 42.24|
| 48 | 46.56| 48 | 45.06|
| Mean | 25.391| 25.516| 25.194|
| 偏差 | 0.609| 0.484| 0.806|
这些间隔期间,信息被感知并传输到AMD。在观察的时间间隔内,累积速率各不相同。
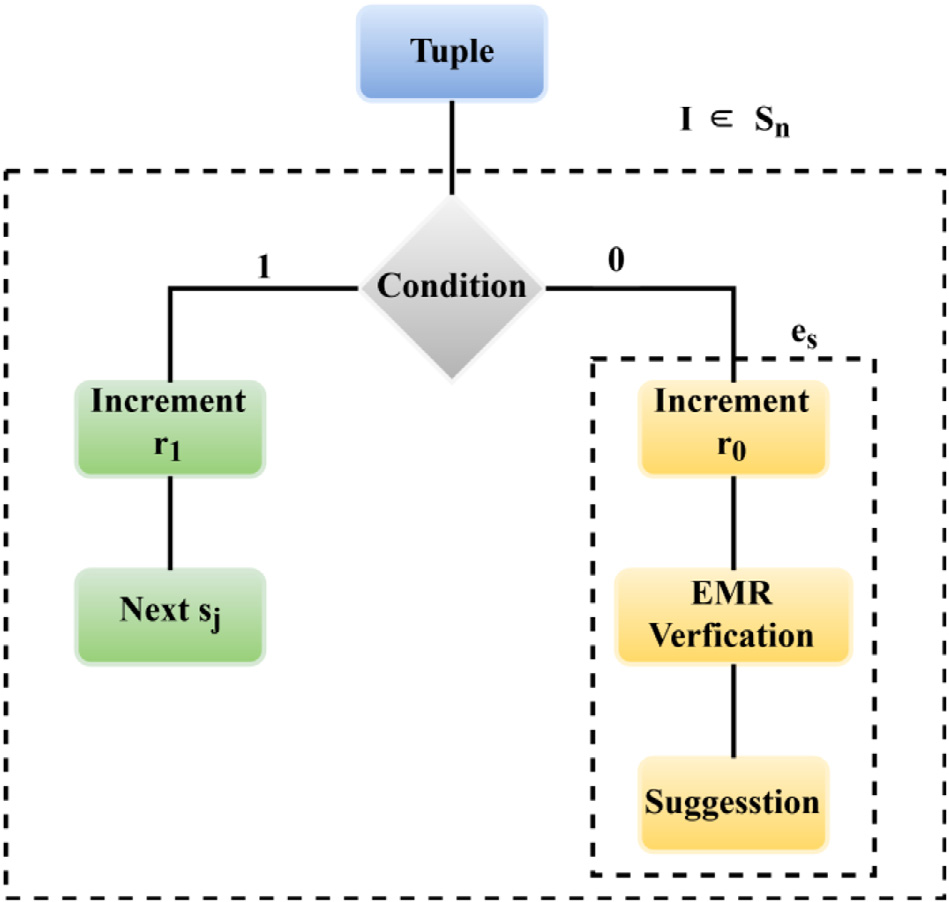
预测学习算法执行分类和回归操作。在分类部分,学习过程识别结果(r)和实例(∅)。结果表示1/a 0,实例表示被分类为1和0的总和。分类后的元组表的样本表示如图3(a)所示。
如果元组值满足条件,则r1=1否则r0=1。考虑到存储和处理能力的限制,该传感器端的回归被卸载到BN‐MC。上述分类记录与MC中的现有EMR进行比较,通过AMD提供建议。由于BN‐MC中的学习回归过程生成了元组条件的所有可能组合并分配了权重,因此不匹配的EMR的可能性非常低。从而充分利用设备的处理能力进行比较验证,同时占用较少存储。为了提高分类的可靠性,∑r1,r0针对所有I∈sn持续递增。图3(b)展示了分类过程。
监测系统中执行的另一种处理是正常条件因子的估计(fn)。该因子使用公式(2)进行估算
$$
f_n = \frac{1}{2} \times \frac{r_1 r_0}{\sum_{i=0}^{s_n} \left| \frac{r_{1i} - r_{0i}}{\sum(r_{1i}, r_{0i})} \right|} \tag{2}
$$
如果fn > r0/r1,则用户处于正常状态,否则被感知的元组值出现异常变化。该条件由监测系统(WS)验证,并在BN‐MC回归中更新。如果fn > r0/r1,则在BN‐MC中的AMD和通知系统(NS)触发通知。实时医疗应用向用户推荐治疗建议,甚至可能导致门诊就诊或住院。该建议依赖于I的值及其可能的组合,以判断疾病的严重程度和用户的异常情况。
如果fn不满足,则es开始持续监测异常传感器数值及用户健康状况。上述验证过程及es估计在此分类过程中进行,同时考虑监测系统(WS)的有限处理能力和存储能力。具体而言,针对“步行”活动,三个受试者的分类表如表5所示。
负值表示检测到紧急事件,而正值表示事件接近周期性间隔。图4显示了事件检测率
 . 分类表)
. 分类表)
 . 分类过程)
. 分类过程)
表5 三个受试者步行活动的分类表
| 间隔 sj | Sub1 | | | Sub2 | | | Sub3 | | |
|--------|-----|—|—|-----|—|—|-----|—|—|
| | r1 | r0| fn| r1 | r0| fn| r1 | r0| fn|
| 4 | 1 | 0 |- | 1 | 0 |- | 0 | 1 |- |
| 8 | 0 | 1 |0 | 0 | 1 |0 | 1 | 0 |0 |
| 12 | 0 | 1 |-0.08| 0 | 1 |0.083| 1 | 0 |0.0083|
| 16 | 1 | 0 |0 | 0 | 1 |0 | 0 | 1 |0 |
| 20 | 1 | 0 |0.0167| 1 | 0 |0.0167| 1 | 0 |0.0167|
| 24 | 0 | 1 |0 | 1 | 0 |0.0208| 0 | 1 |0 |
| 28 | 1 | 0 |0.00595| 0 | 1 |0.00595| 1 | 0 |0.00595|
| 32 | 1 | 0 |0.0083| 1 | 0 |0.0083| 1 | 0 |0.0083|
| 36 | 0 | 1 |0.00278| 1 | 0 |0.00952| 1 | 0 |0.00925|
| 40 | 0 | 1 |0 | 1 | 0 |0.00952| 1 | 0 |0.00952|
| 44 | 0 | 1 |-0.0030| 0 | 1 |0.00487| 0 | 1 |0.00487|
事件检测间隔每4小时划分一次,总共每天12次。事件检测率的增加会提升传感器的数据流。
表6 三个受试者的区间偏差
| Sub间隔 | Sub1 | Sub2 | Sub3 |
|---------|------|------|------|
| 3.58 | | | |
| 7.6 | 0.4 | | |
| 10.4 | | | |
| 11.2 | | -0.0924| |
| 12.44 | | | -0.0813|
| 14.53 | | 0 | |
| 22.13 | -0.0172| | |
| 23 | | | 0 |
| 27.1 | | -0.02| |
| 35.2 | -0.002| | |
| 39.4 | -0.00194| | |
| 41.36 | | -0.0095| |
| 42.24 | | | -0.0092|
| 43.4 | +0.003| | |
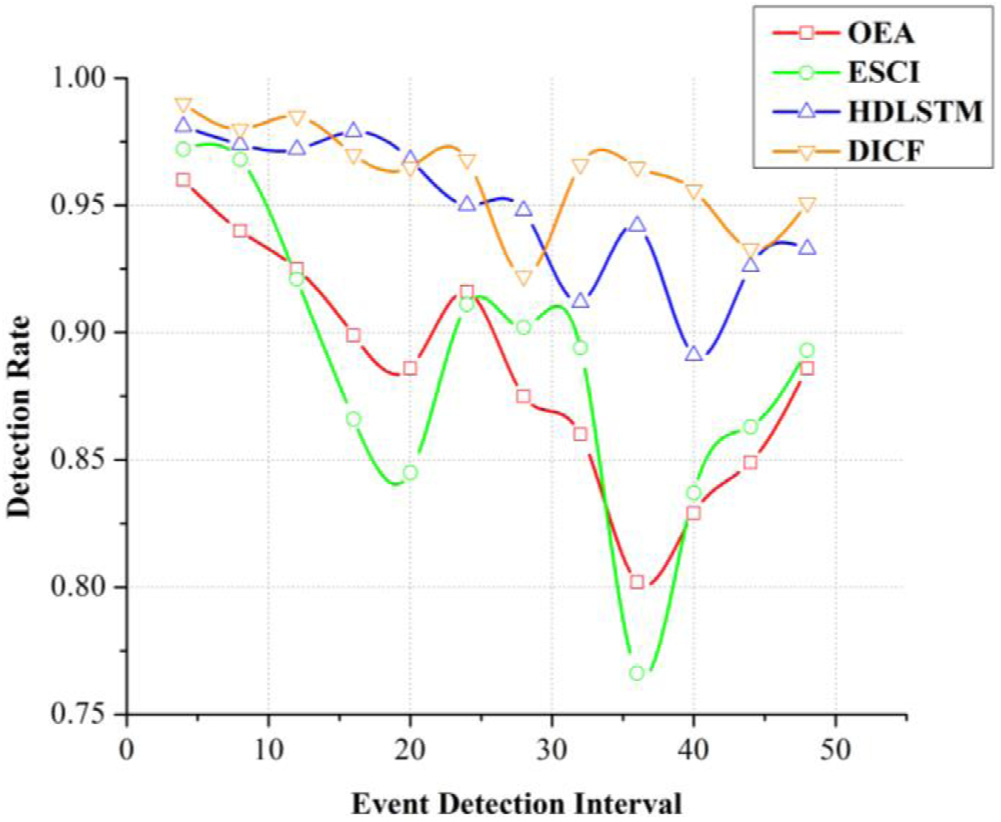
在图4中,考虑了单个受试者所有活动的累积事件检测情况。从相关性来看,可以看出偏差发生在受试者的以下间隔中。此时,信息流速率急剧增加,因此频繁检测被观察到。因此,在所提出的框架中,事件检测率sj较高。
在图5中,比较了现有方法与所提出的框架之间的传感器数据比率累积情况。频繁的es和接近周期性事件间隔的速率增加了传感器信息的流动。AMD通过收集I并将其转发至BN‐MC来执行汇聚/中心操作。分类过程根据条件(满足es和fn)区分r1和r0,从而提升传感器信息的优先级。AMD执行两种操作:周期性间隔的数据积累和es数据收集。这两个过程均提高了AMD的数据处理能力。如果AMD的处理能力增加,将提升数据收集和处理的速率。因此,AMD在周期性和es间隔内获取的累积数据量较高。
一种用于控制智能医疗应用中可穿戴传感器操作的动态互操作通信框架
信息I决策过程
在BN‐MC中重新审视了复杂的决策制定,以提高智能医疗应用的利润。分类元组被独立存储在电子病历(EMR)中。这些构成了EMR的基本元素,并在此基础上进行进一步的决策。EMR在MC内部与监控单元(MU)、医疗记录存储(MRS)和通知系统(NS)相连。完整的患者信息以电子格式存储在MRS中。MRS保留带有日期和时间的信息I。为了便于数据提取和存储,决策过程针对常规感知和es感知进行了区分。在基于es的记录分类中,I的权重(w)被添加到存储字段中。异常事件(es)和常规记录均与临床诊断和医疗建议相关联。决策通过分类和回归机器学习来辅助。机器学习的预测部分通过重复分析I进行优化。回归过程依赖于es或sj以及I的值,以改进预测方案。预测结果存储在电子病历中,并作为后续分析的参考依据。以下章节将解释用于诊断建议和疾病预测的回归辅助决策。
所需的一个因素是辅助决策的元组增益(Gi)和熵(ê)。这两个因素显著决定了接收到的信息I的可靠性(R(I))。式(3)–(5)分别给出了Gi、ê和R(I)的计算方法。
$$
G_i = \frac{1}{r_1 - r_0} \log_2\left(\frac{r_0}{r_1}\right) \tag{3}
$$
$$
\hat{e} = \sum_{j=1}^{s_n} \frac{r_{0j} + r_{1j}}{\sum(r_0, r_1)} \times G_i \tag{4}
$$
$$
R(I) = G_i - \hat{e} \tag{5}
$$
估计指标有助于确定I的可靠性,从而得出最优预测。针对所有满足 $ \frac{r_0}{r_1} < f_n > \frac{r_0}{r_1} $ 条件的I,对R(I)进行估计。以下将说明在两种情况下对I的分析。
分析I:普通用户信息决策
设t为用于监测用户健康信息的时间段。在常规传感器读数中,$ t = \sum s_i $ 因此t被划分为t/si个更新间隔。为所有i估计元组索引ı,以根据先前存储的值来估算所接收I的w。元组索引通过公式(6)计算为
$$
ı = 1 - \left[\left(\frac{r_1}{2}\right)^2 - \left(\frac{r_0}{2}\right)^2\right] \tag{6}
$$
平均值权重wavg然后通过公式(7)计算得出
$$
w_{avg} = \frac{\sum_{i=1}^4 w_i}{4}, \quad \text{where} \quad w_i = \frac{R(I)}{\sum(r_1, r_0)} \times ı, \quad i = 1, 2, 3, 4 \tag{7}
$$
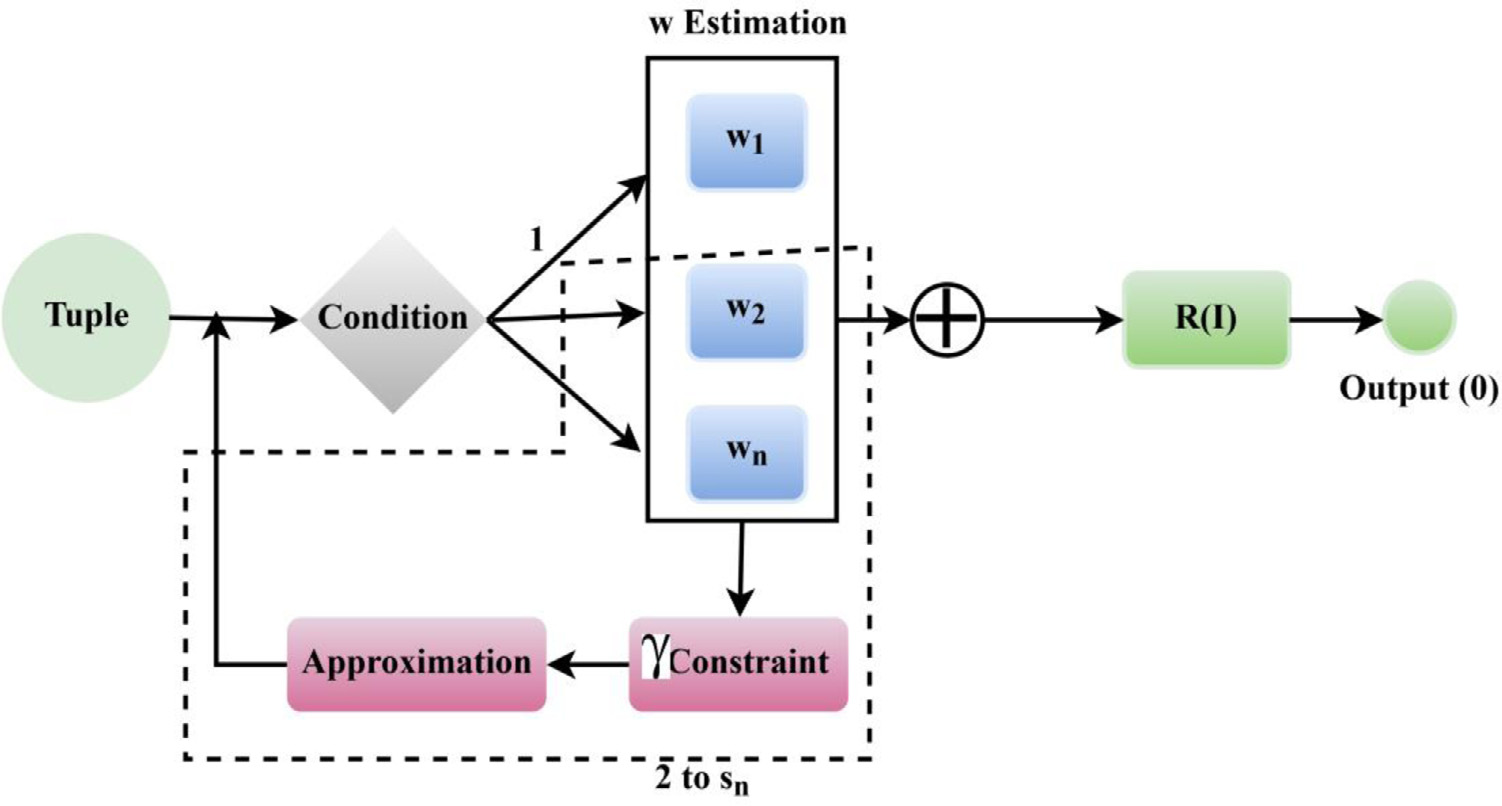
对于正常用户I,fn = 1因此,$ w_i = \frac{R(I)}{\sum(r_1, r_0)} $。该值不是常数,因为t/si在所有元组中均不同。因此,在估计时,变化量γ被增加到wi。因子γ被视为wavg的误差/近似因子。决策过程依赖于元组I的回归学习,如图6(a)所示。
输出(0)o是来自先前wavg − γ观察到的一个显著近似值sn。近似变化因子由公式(8)估算
$$
\gamma_1 = w_0 \times f_{n0} + \hat{e}
0 \
\gamma_2 = (w_1 - w_0) \times f
{n1} + \hat{e}
1 \
\vdots \
\gamma_n = (w
{n-1} - w_{n-2}) \times f_{n(n-1)} + \hat{e}_{n-1} \
\text{and} \quad \gamma = \frac{\gamma_1 + \gamma_2 + \cdots + \gamma_n}{n} \tag{8}
$$
近似值wavg通过R(I)进行验证,使得两者之间的差异可忽略。MRS保留变化以更新所有i=1的wavg至sn监测与更新间隔。如果差异[R(I), wavg]较高/可接受,则导致该差异的i通过公式(6)识别,以生成包含医生建议的存储推荐。该建议再次作为通知在AMD中发送。评估中的此信息不会传输至WS,以防止对本地决策造成干扰。相反,本地决策结果与诱导方差的i相关联,以保留R(I)。
分析‐II:异常用户信息决策
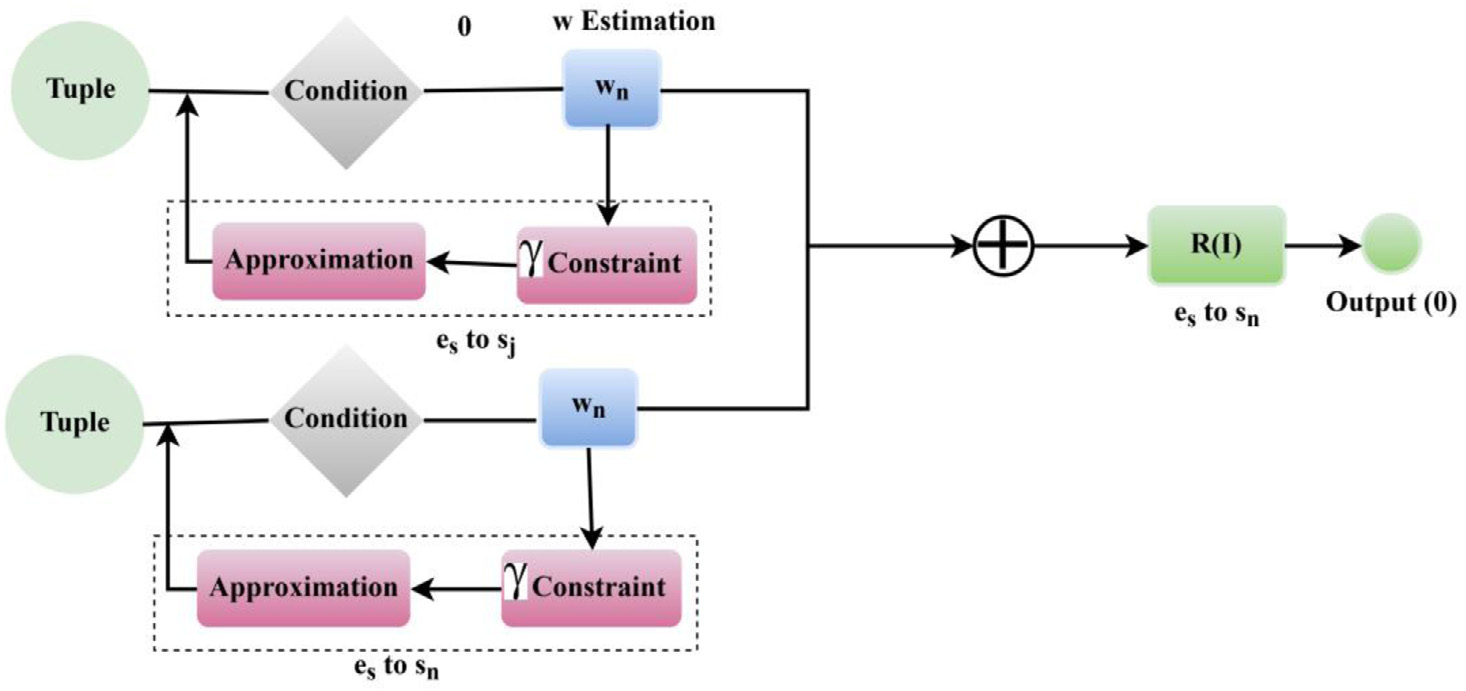
与分析–I中提出的过程不同,这里采用机器学习进行决策,用于关键特征分析。当t/si被es中断时,该分析即被触发,其中,$ f_n < \frac{r_0}{r_1} $。利用学习过程对0的精度预期较高,以接近真实的电子病历值。因此,通过识别异常,诊断和建议是可靠的。为了增强此功能,回归过程与t/si在es中的干扰相关联。因此,回归在两个区间(即)(es to sj)和(es to sn), sj < sn内进行。图6(b)展示了在两个不同时间间隔内对I的回归学习。
此处的γ在两个不同的时间间隔内进行估算,即
$$
\gamma(es, sj) = \frac{\gamma_1 + \gamma_2 + \cdots + \gamma_{sj}}{m}, \quad m = es \text{ to } sj \
\text{and} \quad \gamma(es, sn) = \frac{\gamma_1 + \gamma_2 + \cdots + \gamma_n}{(n - m)} \tag{9}
$$
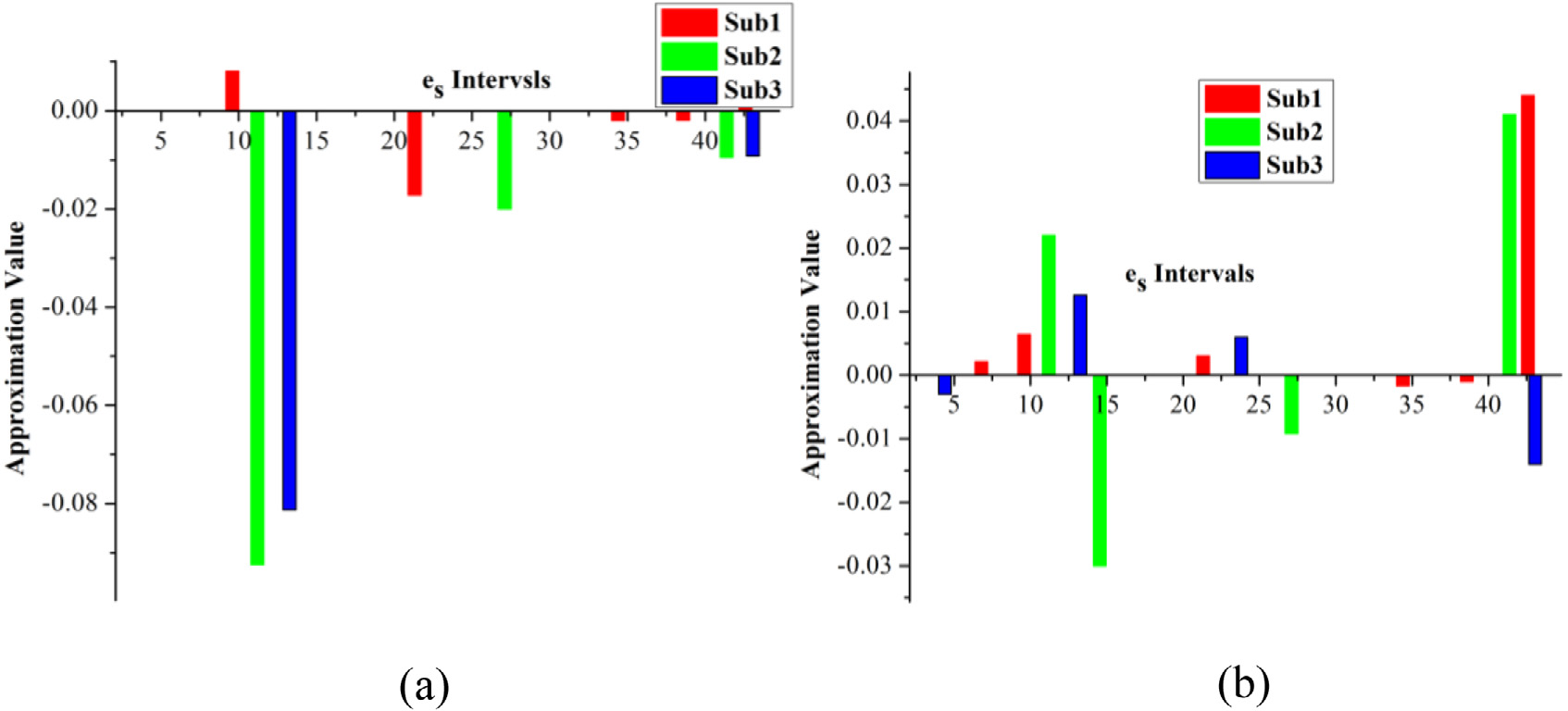
两个γ与R(I)在es到sn的时间间隔内进行异或运算。R(I)在es到sn的值与分析中讨论的不同I。生成的0提供了更好的I分析速率,使结果与存储的电子病历相匹配。电子病历以回归方式存储了针对44条件(针对4个元组)的信息处理。元组的索引ı结果值较小,其中R(I) > wavg,因此不可忽略。如果监控单元检测到R(I) > wavg的差异,则根据在es中的观测结果更新电子病历。通知系统生成警报,并从医疗记录存储中获取用户的既往病史。此外,向AMD发送高级警报通知,用于进一步的诊断和健康监测。如果感知到es异常事件(es),则无论t/si时间间隔如何,医疗记录存储都将被顺序更新,直到回归决策系统遇到可忽略的情况为止。这种差异化决策过程降低了计算复杂度以及AMD的本地自我建议,从而优化医疗应用。在表6中,对图6(b)所示过程观察到的近似值进行了制表。该表格列出了3名受试者在4到48的时间间隔内所有活动的数值。
表7 不同区间的近似值
| 间隔 | es to sj | | | es to sn | | |
|------|---------|—|—|---------|—|—|
| | Sub1 | Sub2| Sub3| Sub1 | Sub2| Sub3|
| 3.58 | | | | 0 | | -0.003|
| 7.6 | 0 | | | 0.0021 | | |
| 10.4 | +0.00813| | | +0.00644| | |
| 11.2 | | -0.0924| | | +0.022| |
| 12.44| | | -0.0813| | | +0.0126|
| 14.53| | 0 | | | -0.03| |
| 22.13| -0.0172 | | | +0.003 | | |
| 23 | | | 0 | | | +0.006|
| 27.1 | | -0.02| | | -0.0092| |
| 35.2 | -0.002 | | | -0.0017 | | |
| 39.4 | -0.00194| | | -0.001 | | |
| 41.36| | -0.0095| | | +0.041| |
| 42.24| | | -0.0092| | | -0.014|
| 43.4 | +0.003 | | | +0.044 | | |
负值表示相对于fn在表7中观察到的偏差的归一化。近似值被划分为两个区间(es to sj)和(es to sn),分别如图7(a)和7(b)所示。近似值根据活动和传感器信息的变化而随es和fn的改变而变化。
框架的通信过程
信息传输和接收是该框架中通信的两个主要方面。通信包括作为信号实体的聚合与传输,以及作为另一实体的通知接收。在该框架中,聚合的I(Ia)通过公式(10)计算得出
$$
I_a = \sum_{i=1}^{s_n} \left( \sum_{i=1}^4 i_i \right), \quad \text{for normal } I \
I_a = \sum_{i=1}^{e_s} \left( \sum_{i=1}^4 i_i \right) + \sum_{i=e_s}^{s_j} \left( \sum_{i=1}^4 i_i \right), \quad \text{for abnormal } I \tag{10}
$$
Ia在正常I情况下,元组以t max{savg}生成;而针对异常I,元组则在tes间隔内生成。如果AMD从t max{savg}切换到tes间隔,感知信息的流量速率会导致聚合设备拥塞。这导致I信息丢失,因此R(I)不稳定。更新时间间隔的差异导致诊断预测不准确,从而降低应用效果。因此,必须在了解异常传感器值的情况下组织I传输。为了实现快速可靠的I传输,设计了有序信息转发作为互操作通信的一部分。有序信息转发方法依赖于无线链路容量(cl)和链路延迟(dl)。I中的元组传输顺序取决于传感器值的fn。这些元组的fn按降序重新排列,使得fn值最小的元组占据AMD的最后一个存储空间。最先存储的元组将首先传输至BN‐MC。还存在其他情况,即两到四个元组具有相同的fn,这意味着用户需要立即进行诊断,因此能迅速收到确认通知。因此,需减少传输延迟,并将精确的更新间隔更新至BN‐MC。令ni表示紧急元组的数量,max{ni}=4和max{ni}=0。然后计算有序传输时隙的数量为
$$
t_s = \frac{(1 - \frac{1}{n_i})}{n_i - 1} \tag{11}
$$
时隙中的元组ts通过有序地进行存储和传输成功传输,其成功交付的概率(ρd)由公式(12)给出
$$
\rho_d = \sum_{i=1}^{e_s} t_s (1 - t_s)^i + \sum_{i=e_s}^{s_j} t_s (1 - t_s)^i \tag{12}
$$
同样,此场景中的链路容量被考虑用于接受ts以实现高ρd使得clmin ≥ (ts × is)并且is是元组大小。如果全部四个元组都在感知异常值,则clmax ≥ (4ts × is);最小和最大cl满足最大{ρd}。现在,在es之后的更新间隔基于ts建模。各种时隙的更新I和t因此由公式(13)给出
$$
s_{avg} = t \prod_{i=1}^4 t_s^{k_i}, \quad \forall k = es \text{ to } sj \tag{13}
$$
根据式(13)计算,动态调整clmin和clmax以适应savg。固定的cl随接口技术(如Wi‐Fi、WLAN或Zigbee)以及H‐WS与BN‐MC之间的距离而变化。在所采用的任何技术中,针对EMG、SE、SG和TH这4个元组,为处理i或Ia(异常事件(es),见公式(10))所需的最小和最大链路容量被分配,以确保高ρd。同样,传递I的延迟tlat由以下给出:
$$
t_{lat} =
\begin{cases}
\frac{t_{savg}}{} + d_l, & \text{for normal } I \
\frac{t_{savg} - t_{es} + c_l}{t_s}, & \text{for abnormal } I
\end{cases} \tag{14}
$$
根据公式(14)估算的延迟适用于从WS到AMD再到BM‐MC的通信操作。通知由AMD接收,因此产生响应时间(tres) < tlat。对i ∈ I的排序基于ts和Ia,并使用savg(公式(13))的更新间隔,以实现更高的ρd。如果ρd较高,则R(I)得到改善,有助于提高更好的诊断可靠性。该通信过程的
 . 正常I的回归学习)
. 正常I的回归学习)
 . 在两个不同时间间隔内对异常I的回归学习)
. 在两个不同时间间隔内对异常I的回归学习)
 es to sj间隔的近似值)
es to sj间隔的近似值)
 es to sn间隔)
es to sn间隔)
DICF使用端到端延迟和传感器数据丢失指标与现有方法进行比较评估,如图4和5所示。
来自AMD的Ia在sj间隔内以tsavg + dl的延迟进行传输,并在es中检测到事件时以(tsavg − tes + cl/ts)进行传输。所需传输时间通过估算sj中的savg或es在(es to sj)和(es to sn)递归间隔中的值预先确定。因此,无论数据流如何,r1 ≠ 0或r0 ≠ 0中的分类的数据包都在ts时隙中传输,以确保tres < tlat。为实现此条件,来自AMD的Ia在ts处传输,而不受cl的影响。因此,为了保持tres内的时限,为每个ts ∈ sj分配了传输时间。此处,最大时间t用于计算最多接收4个传感器数据的情况,该情况在两种情形下被分类为tlat(见公式(14))。然而,该时间相对较短,因为现有方法并未独立对es进行分类(参见图8)。
图9解释了现有方法与所提出方法之间关于传感器数据丢失的比较分析。在DICF中,通过估算成功概率ρd来确保成功传感器数据传输ts。通过估算传感器数据流和链路容量来分配时隙,以确保最大数据包传输。满足以下条件的元组
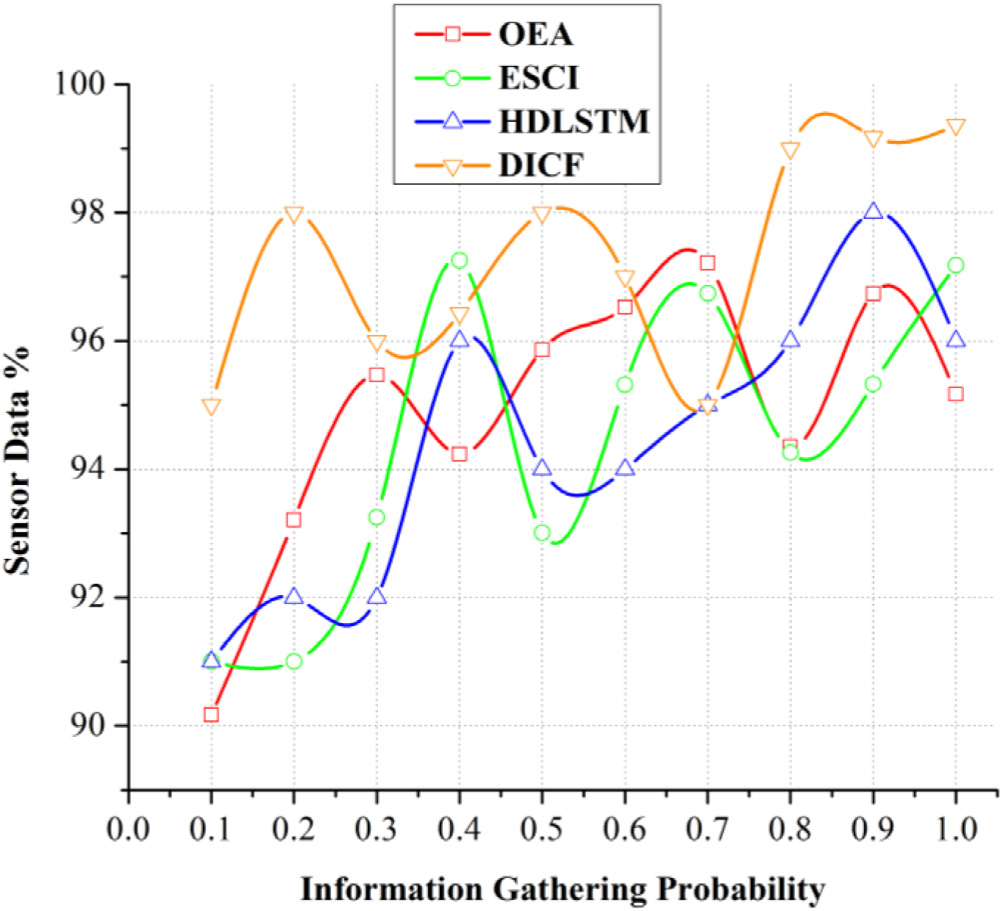
表8 OEA、ESCI、HDLSTM和DICF的比较分析
| 指标 | OEA | ESCI | HDLSTM | DICF |
|------|-----|------|--------|------|
| 检测率 | 0.886 | 0.893 | 0.933 | 0.951 |
| 传感器数据百分比 | 95.17 | 97.18 | 96 | 99.37 |
| 端到端延迟(毫秒) | 63.79 | 53.58 | 47.41 | 41.43 |
| 传感器数据丢失 | 268 | 184 | 115 | 74 |
clmin ≥ (ts × is)和clmax ≥ (4ts × is)根据可用的链路容量使用不同的时隙进行传输。成功的ρd被更新savg以确保Ia被送达BN‐HS。因此,在正常和异常事件检测间隔中,Ia均被分配适当的ts以确保最大数量的数据包(在es和sj)能够成功送达目的地。比较分析的实验结果总结于表8。
结论
在本文稿中,提出了一种用于基于可穿戴传感器的医疗保健系统的动态互操作通信框架。该框架继承了传感器和通信技术的优势,以提升医疗保健系统的通信能力和数据处理速率。基于分类与回归的决策机制有助于事件检测和紧急间隔识别,从而改善可穿戴传感器操作的性能。DICF协调监测系统中的数据收集、事件检测与分析、通信特征以及决策系统,以增强依赖传感器的个人医疗系统的效益。未来,计划将该框架应用于智慧城市应用中的智能废物管理和智能电子废物系统。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









