




 本文详细介绍ROS功能包(package)的概念,包括其基本组成如CMakeLists.txt和package.xml的作用,自定义通信内容的方法,以及launch和config文件的使用。同时,文章提供了创建和管理ROS包的实用指令和实践步骤。
本文详细介绍ROS功能包(package)的概念,包括其基本组成如CMakeLists.txt和package.xml的作用,自定义通信内容的方法,以及launch和config文件的使用。同时,文章提供了创建和管理ROS包的实用指令和实践步骤。
什么是package
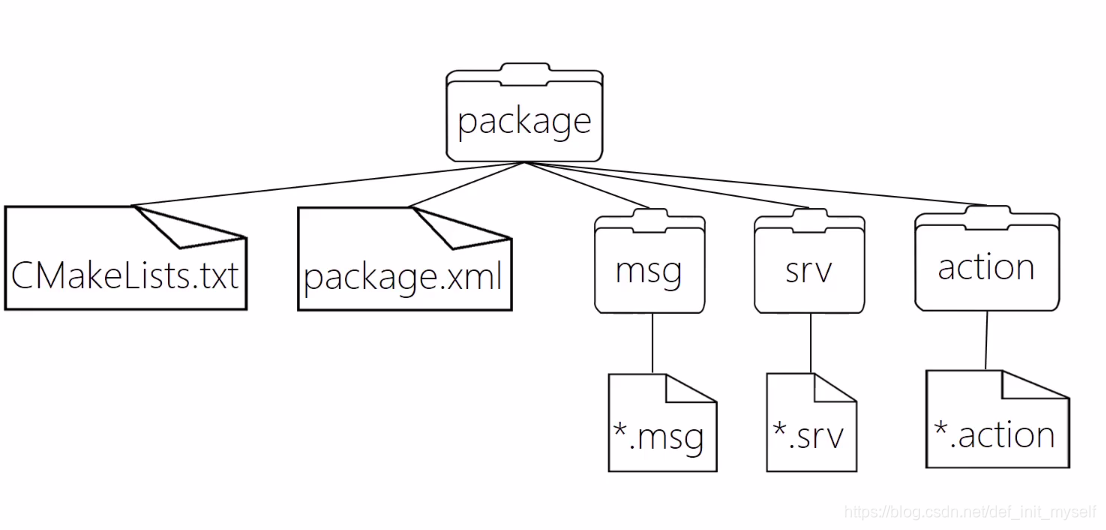
package:功能包,是ros软件的基本组成形式,是catkin编译的基本单元。一个package可以包含多个可执行文件。
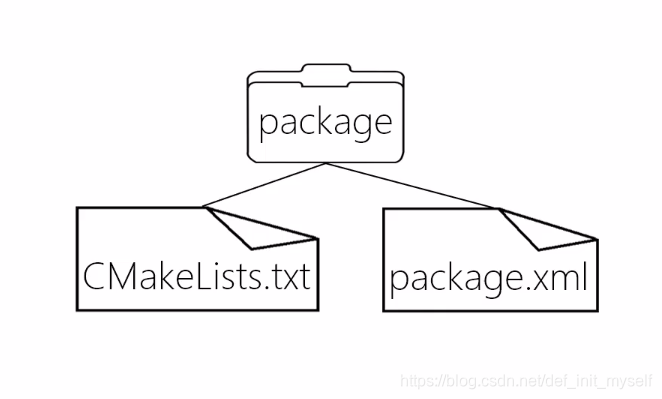
package只有有这两个文件,才能被编译系统认为是package。
CmakeList.txt
CmakeList.txt规定编译规则。源文件,依赖,目标文件等。。。
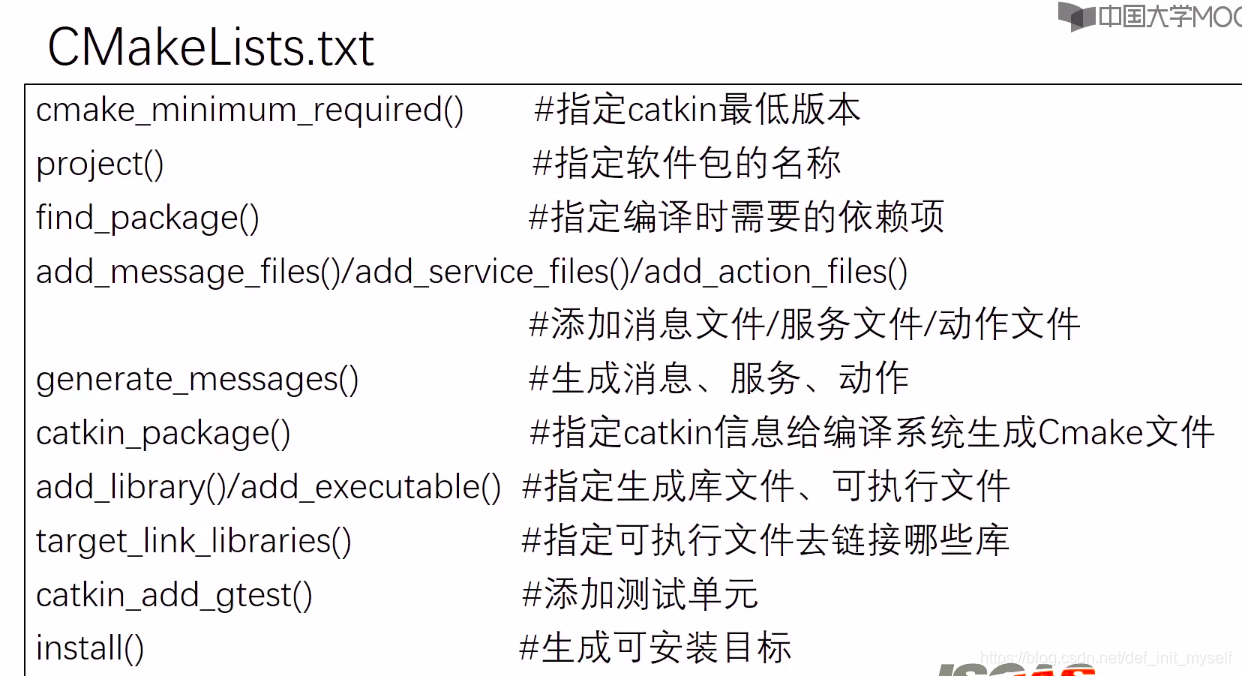
在创建package时候,会生成模板,然后来改就好。
package.xml
package.xml文件定义package的属性信息,作者,维护者等。只需要改划横线的地方就好。
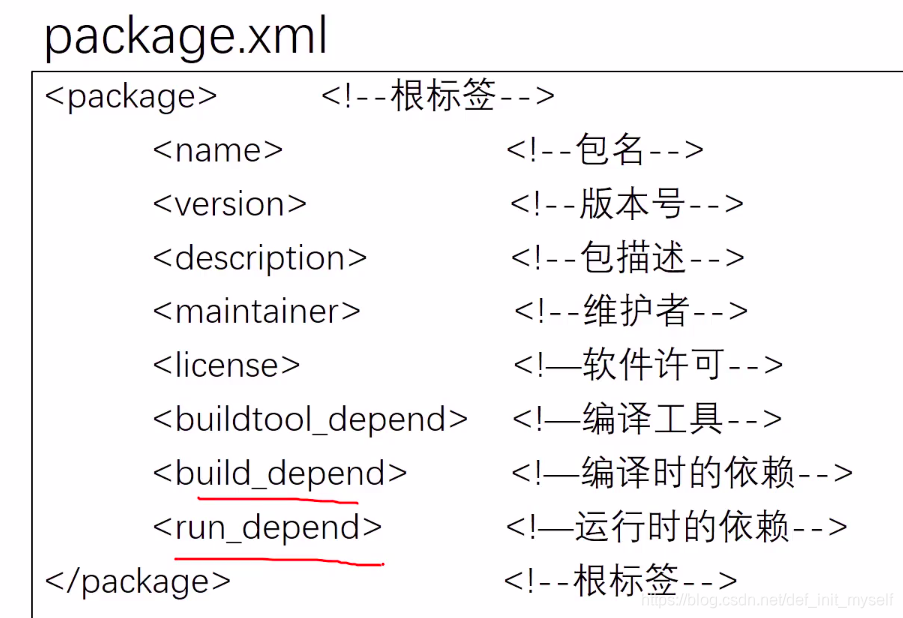
老版本叫manifest.xml
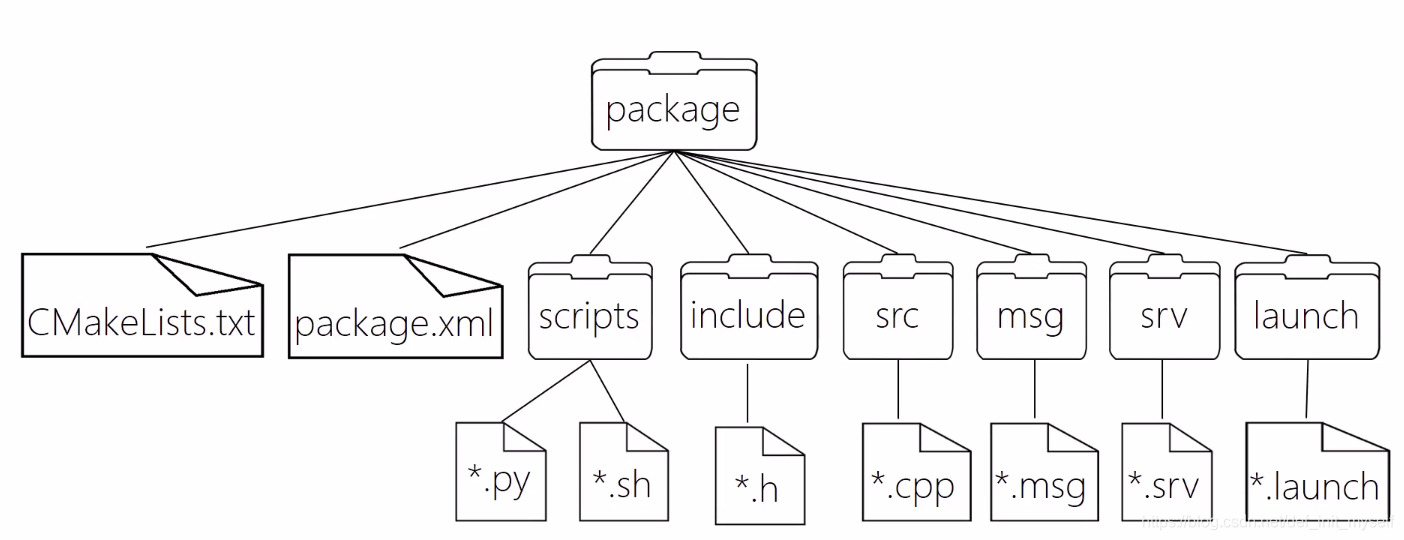
代码文件
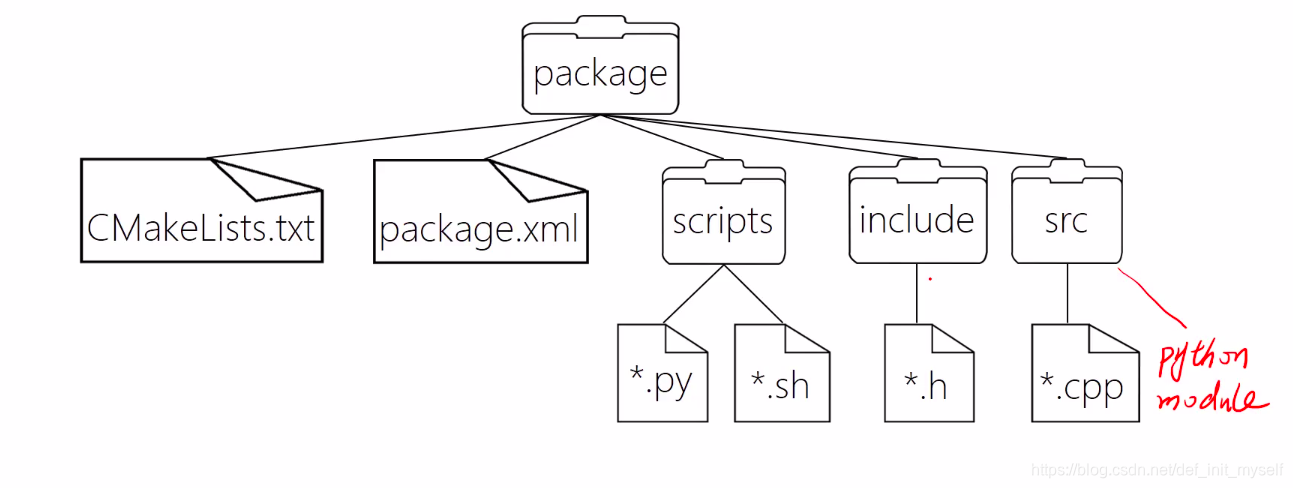
scripts:脚本文件
include:头文件
scr:python或者cpp
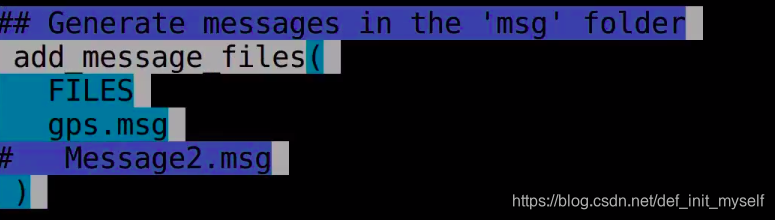
自定义通信内容(消息,服务,动作)
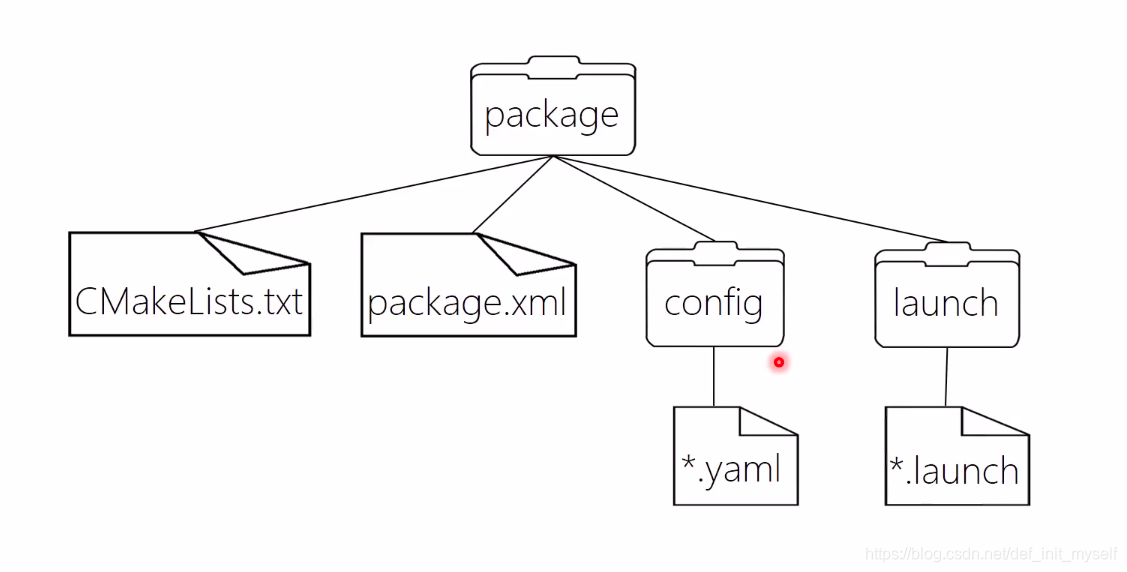
launch文件、配置文件
将可执行文件组织起来
launch一次运行多个可执行文件
config:参数,设置
总结
常用包管理指令
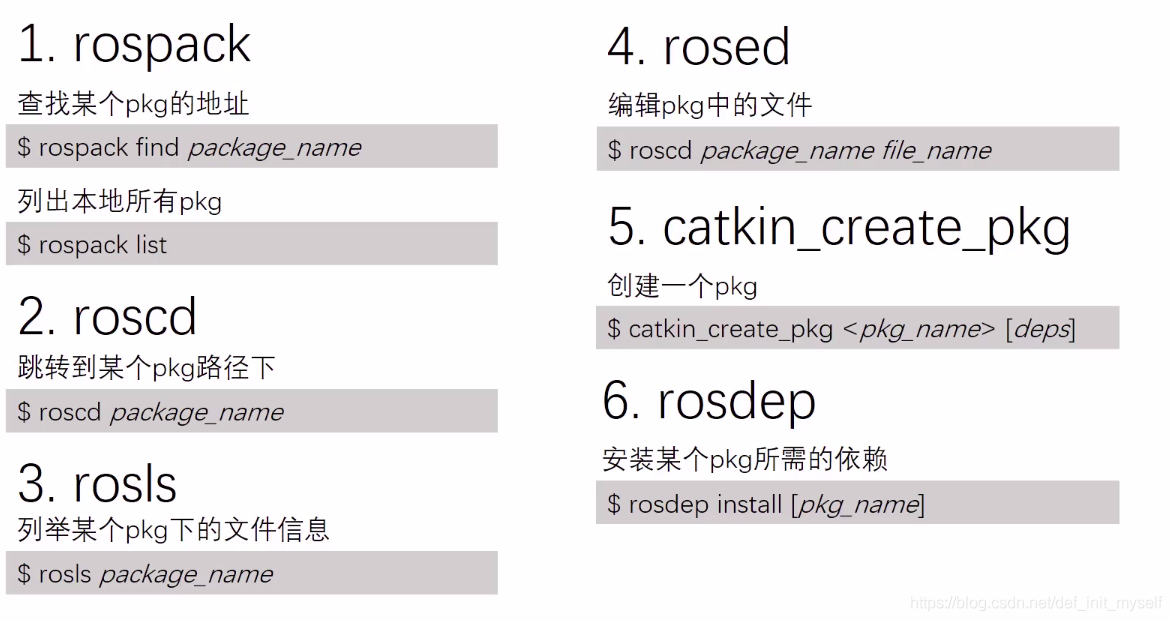
比如用rosed命令。
rosed test1 CMakeLists.txt
可以直接打开这个CMakeLists.txt 文件,因为这个文件是编译规则的模板,生成message就只需要将注释去掉,等。
第六个用在github上clone的package
实践
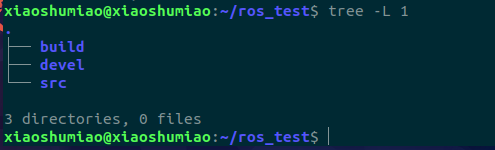
tree软件可以查看结构
创建package且自动添加依赖进CMakeLists.txt和package.xml
catkin_create_pkg test1 roscpp rospy std_msgs nav_msgs#c++,py编成API,通信,导航
clone的文件放在src中,然后回到工作空间安装依赖,最后编译。
下面的代码是将这个命令放在这个环境变量文件中,这样每开一个终端就可以自动执行source。这样才能用之前讲的命令去操作。
echo "source ~/ros_test/devel/setup.bash">> ~/.bashrc
rospack profile#刷新环境命令


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









