







 本文详细介绍如何在Ubuntu虚拟机中使用PlanningSceneROSAPI,通过ROS API实现添加、删除物体及机器人上安装拆卸物体的操作,配合RViz进行实时可视化。
本文详细介绍如何在Ubuntu虚拟机中使用PlanningSceneROSAPI,通过ROS API实现添加、删除物体及机器人上安装拆卸物体的操作,配合RViz进行实时可视化。
Planning Scene ROS API
在本教程中,我们将检查使用规划场景差异来执行两个操作:
在世界中添加和删除对象
在机器人上安装和拆卸物体
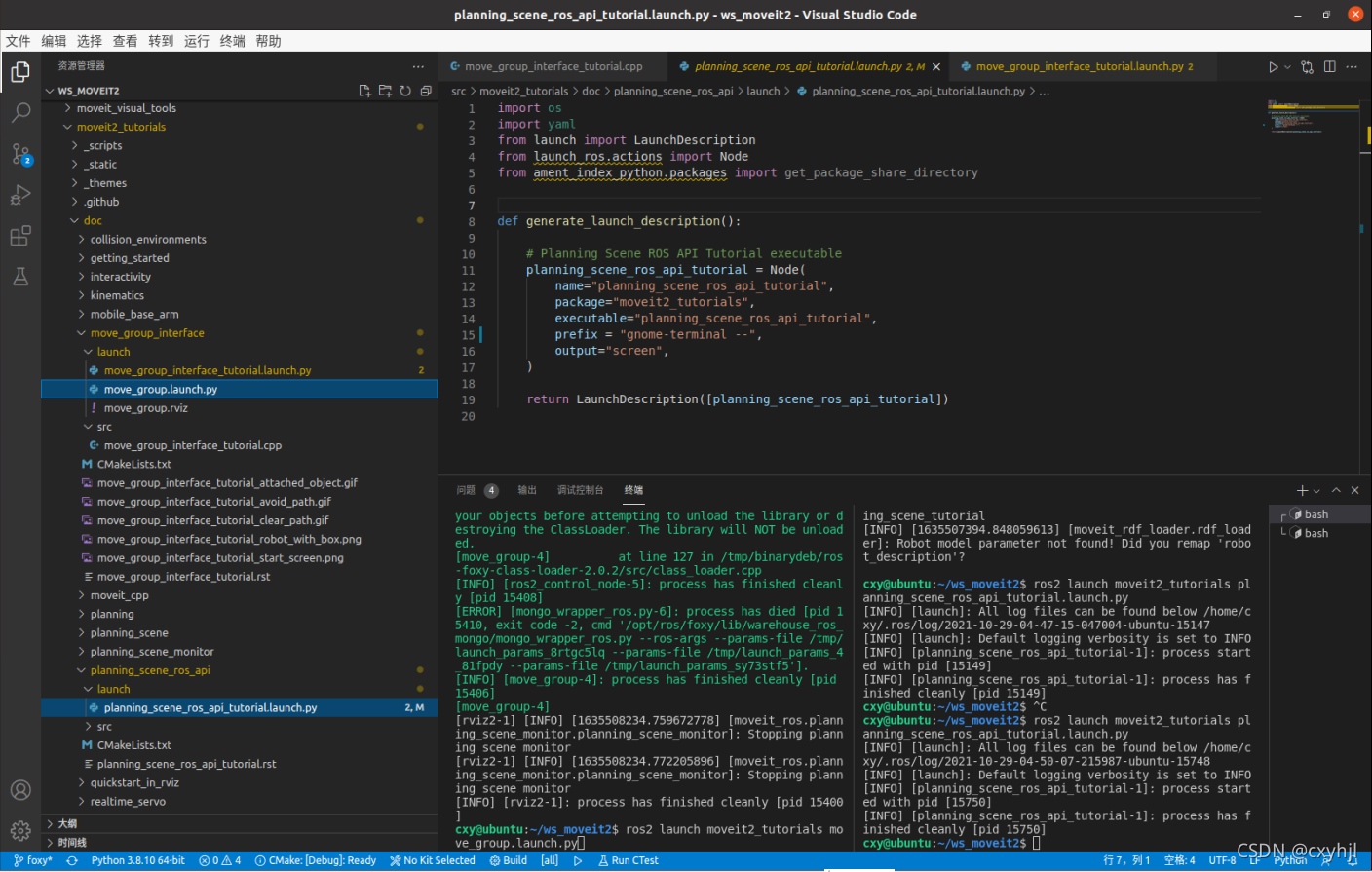
Ubuntu 虚拟机 VSCode界面
Running the code
打开两个终端。 在第一个 shell 中启动 RViz 并等待一切完成加载:
ros2 launch moveit2_tutorials move_group.launch.py
在第二个 shell 中,运行此演示的启动文件:
ros2 launch moveit2_tutorials planning_scene_ros_api_tutorial.launch.py
片刻之后,RViz 窗口应该会出现,看起来类似于可视化教程。 要完成每个演示步骤,请按屏幕底部 RvizVisualToolsGui 面板中的下一步按钮或选择屏幕顶部工具面板中的关键工具,然后在 RViz 聚焦时按键盘上的 N。
Expected Output
在 RViz 中,您应该能够看到以下内容:
对象出现在规划场景中。
物体附着在机器人上。
对象与机器人分离。
从规划场景中移除对象
planning_scene_ros_api_tutorial
完整代码:
#include <rclcpp/rclcpp.hpp>
#include <geometry_msgs/msg/pose.hpp>
// MoveIt
#include <moveit_msgs/msg/planning_scene.hpp>
#include <moveit_msgs/msg/attached_collision_object.hpp>
#include <moveit_msgs/srv/get_state_validity.hpp>
#include <moveit_msgs/msg/display_robot_state.hpp>
#include <moveit_msgs/srv/apply_planning_scene.hpp>
#include <moveit/robot_model_loader/robot_model_loader.h>
#include <moveit/robot_state/robot_state.h>
#include <moveit/robot_state/conversions.h>
/* #include <moveit_visual_tools/moveit_visual_tools.h> This has not been ported to ros2 yet */
#include <rviz_visual_tools/rviz_visual_tools.hpp>
/* this is a standin for moveit_visual_tools prompt */
#include <moveit/macros/console_colors.h>
void prompt(const std::string& message)
{
printf(MOVEIT_CONSOLE_COLOR_GREEN "\n%s" MOVEIT_CONSOLE_COLOR_RESET, message.c_str());
fflush(stdout);
while (std::cin.get() != '\n' && rclcpp::ok())
;
}
static const rclcpp::Logger LOGGER = rclcpp::get_logger("planning_scene_ros_api_tutorial");
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
rclcpp::NodeOptions node_options;
node_options.automatically_declare_parameters_from_overrides(true);
auto node = rclcpp::Node::make_shared("planning_scene_ros_api_tutorial", node_options);
rclcpp::executors::SingleThreadedExecutor executor;
executor.add_node(node);
std::thread([&executor]() { executor.spin(); }).detach();
// BEGIN_TUTORIAL
//
// Visualization
// ^^^^^^^^^^^^^
// The package MoveItVisualTools provides many capabilities for visualizing objects, robots,
// and trajectories in RViz as well as debugging tools such as step-by-step introspection of a script.
rviz_visual_tools::RvizVisualTools visual_tools("panda_link0", "planning_scene_ros_api_tutorial", node);
visual_tools.deleteAllMarkers();
// ROS API
// ^^^^^^^
// The ROS API to the planning scene publisher is through a topic interface
// using "diffs". A planning scene diff is the difference between the current
// planning scene (maintained by the move_group node) and the new planning
// scene desired by the user.
//
// Advertise the required topic
// ^^^^^^^^^^^^^^^^^^^^^^^^^^^^
// We create a publisher and wait for subscribers.
// Note that this topic may need to be remapped in the launch file.
rclcpp::Publisher<moveit_msgs::msg::PlanningScene>::SharedPtr planning_scene_diff_publisher =
node->create_publisher<moveit_msgs::msg::PlanningScene>("planning_scene", 1);
while (planning_scene_diff_publisher->get_subscription_count() < 1)
{
rclcpp::sleep_for(std::chrono::milliseconds(500));
}
prompt("Press 'Enter' to continue the demo");
/* visual_tools.prompt("Press 'next' in the RvizVisualToolsGui window to continue the demo"); */
// Define the attached object message
// ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
// We will use this message to add or
// subtract the object from the world
// and to attach the object to the robot.
moveit_msgs::msg::AttachedCollisionObject attached_object;
attached_object.link_name = "panda_hand";
/* The header must contain a valid TF frame*/
attached_object.object.header.frame_id = "panda_hand";
/* The id of the object */
attached_object.object.id = "box";
/* A default pose */
geometry_msgs::msg::Pose pose;
pose.position.z = 0.11;
pose.orientation.w = 1.0;
/* Define a box to be attached */
shape_msgs::msg::SolidPrimitive primitive;
primitive.type = primitive.BOX;
primitive.dimensions.resize(3);
primitive.dimensions[0] = 0.075;
primitive.dimensions[1] = 0.075;
primitive.dimensions[2] = 0.075;
attached_object.object.primitives.push_back(primitive);
attached_object.object.primitive_poses.push_back(pose);
// Note that attaching an object to the robot requires
// the corresponding operation to be specified as an ADD operation.
attached_object.object.operation = attached_object.object.ADD;
// Since we are attaching the object to the robot hand to simulate picking up the object,
// we want the collision checker to ignore collisions between the object and the robot hand.
attached_object.touch_links = std::vector<std::string>{ "panda_hand", "panda_leftfinger", "panda_rightfinger" };
// Add an object into the environment
// ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
// Add the object into the environment by adding it to
// the set of collision objects in the "world" part of the
// planning scene. Note that we are using only the "object"
// field of the attached_object message here.
RCLCPP_INFO(LOGGER, "Adding the object into the world at the location of the hand.");
moveit_msgs::msg::PlanningScene planning_scene;
planning_scene.world.collision_objects.push_back(attached_object.object);
planning_scene.is_diff = true;
planning_scene_diff_publisher->publish(planning_scene);
prompt("Press 'Enter' to continue the demo");
/* visual_tools.prompt("Press 'next' in the RvizVisualToolsGui window to continue the demo"); */
// Interlude: Synchronous vs Asynchronous updates
// ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
// There are two separate mechanisms available to interact
// with the move_group node using diffs:
//
// * Send a diff via a rosservice call and block until
// the diff is applied (synchronous update)
// * Send a diff via a topic, continue even though the diff
// might not be applied yet (asynchronous update)
//
// While most of this tutorial uses the latter mechanism (given the long sleeps
// inserted for visualization purposes asynchronous updates do not pose a problem),
// it would be perfectly justified to replace the planning_scene_diff_publisher
// by the following service client:
rclcpp::Client<moveit_msgs::srv::ApplyPlanningScene>::SharedPtr planning_scene_diff_client =
node->create_client<moveit_msgs::srv::ApplyPlanningScene>("apply_planning_scene");
planning_scene_diff_client->wait_for_service();
// and send the diffs to the planning scene via a service call:
auto request = std::make_shared<moveit_msgs::srv::ApplyPlanningScene::Request>();
request->scene = planning_scene;
std::shared_future<std::shared_ptr<moveit_msgs::srv::ApplyPlanningScene_Response>> response_future;
response_future = planning_scene_diff_client->async_send_request(request);
// wait for the service to respond
std::chrono::seconds wait_time(1);
std::future_status fs = response_future.wait_for(wait_time);
if (fs == std::future_status::timeout)
{
RCLCPP_ERROR(LOGGER, "Service timed out.");
}
else
{
std::shared_ptr<moveit_msgs::srv::ApplyPlanningScene_Response> planning_response;
planning_response = response_future.get();
if (planning_response->success)
{
RCLCPP_INFO(LOGGER, "Service successfully added object.");
}
else
{
RCLCPP_ERROR(LOGGER, "Service failed to add object.");
}
}
// Note that this does not continue until we are sure the diff has been applied.
//
// Attach an object to the robot
// ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
// When the robot picks up an object from the environment, we need to
// "attach" the object to the robot so that any component dealing with
// the robot model knows to account for the attached object, e.g. for
// collision checking.
//
// Attaching an object requires two operations
// * Removing the original object from the environment
// * Attaching the object to the robot
/* First, define the REMOVE object message*/
moveit_msgs::msg::CollisionObject remove_object;
remove_object.id = "box";
remove_object.header.frame_id = "panda_hand";
remove_object.operation = remove_object.REMOVE;
// Note how we make sure that the diff message contains no other
// attached objects or collisions objects by clearing those fields
// first.
/* Carry out the REMOVE + ATTACH operation */
RCLCPP_INFO(LOGGER, "Attaching the object to the hand and removing it from the world.");
planning_scene.world.collision_objects.clear();
planning_scene.world.collision_objects.push_back(remove_object);
planning_scene.robot_state.attached_collision_objects.push_back(attached_object);
planning_scene.robot_state.is_diff = true;
planning_scene_diff_publisher->publish(planning_scene);
prompt("Press 'Enter' to continue the demo");
/* visual_tools.prompt("Press 'next' in the RvizVisualToolsGui window to continue the demo"); */
// Detach an object from the robot
// ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
// Detaching an object from the robot requires two operations
// * Detaching the object from the robot
// * Re-introducing the object into the environment
/* First, define the DETACH object message*/
moveit_msgs::msg::AttachedCollisionObject detach_object;
detach_object.object.id = "box";
detach_object.link_name = "panda_hand";
detach_object.object.operation = attached_object.object.REMOVE;
// Note how we make sure that the diff message contains no other
// attached objects or collisions objects by clearing those fields
// first.
/* Carry out the DETACH + ADD operation */
RCLCPP_INFO(LOGGER, "Detaching the object from the robot and returning it to the world.");
planning_scene.robot_state.attached_collision_objects.clear();
planning_scene.robot_state.attached_collision_objects.push_back(detach_object);
planning_scene.robot_state.is_diff = true;
planning_scene.world.collision_objects.clear();
planning_scene.world.collision_objects.push_back(attached_object.object);
planning_scene.is_diff = true;
planning_scene_diff_publisher->publish(planning_scene);
prompt("Press 'Enter' to continue the demo");
/* visual_tools.prompt("Press 'next' in the RvizVisualToolsGui window to continue the demo"); */
// Remove the object from the collision world
// ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
// Removing the object from the collision world just requires
// using the remove object message defined earlier.
// Note, also how we make sure that the diff message contains no other
// attached objects or collisions objects by clearing those fields
// first.
RCLCPP_INFO(LOGGER, "Removing the object from the world.");
planning_scene.robot_state.attached_collision_objects.clear();
planning_scene.world.collision_objects.clear();
planning_scene.world.collision_objects.push_back(remove_object);
planning_scene_diff_publisher->publish(planning_scene);
// END_TUTORIAL
prompt("Press 'Enter' to end the demo");
/* visual_tools.prompt("Press 'next' in the RvizVisualToolsGui window to end the demo"); */
rclcpp::shutdown();
return 0;
}参考:
http://moveit2_tutorials.picknik.ai/doc/planning_scene_ros_api/planning_scene_ros_api_tutorial.html


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









