 网络安全全体系学习资料与ArduPilot避障教程:从入门到进阶,
网络安全全体系学习资料与ArduPilot避障教程:从入门到进阶,





先自我介绍一下,小编浙江大学毕业,去过华为、字节跳动等大厂,目前阿里P7
深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年最新网络安全全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友。


既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上网络安全知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
如果你需要这些资料,可以添加V获取:vip204888 (备注网络安全)

正文
前言
本文介绍如何将英特尔 Realsense 深度摄像头(Intel Realsense Depth Camera)与 ArduPilot 配合使用,以实现避障(obstacle avoidance)。该方法使用在配套计算机上运行的 Python 脚本(非 ROS)向 ArduPilot 发送距离信息。
5 配置ArduPilot
用地面站(如 Mission Planner)连接自动驾驶仪,检查是否设置了以下参数:
- SERIAL2_PROTOCOL = 2(MAVLink2)。请注意,这是假定配套计算机连接到 AutoPilot "Telem2"端口;
- SERIAL2_BAUD = 921 (921600 baud)。
启用你自己选择的任何避障(obstacle avoidance)行为。本 wiki 将以简单的避障行为(Simple avoidance behavior)(停止/滑行)为例:
下面是第一个接近传感器的设置示例:
- PRX1_TYPE = 2: for MAVLink;
- AVOID_ENABLE = 7:“全部”,使用所有障碍物信息源,包括"接近"传感器。
Loiter 和 AltHold 模式的具体示例:
- AVOID_MARGIN =1.5:飞行器在距离障碍物多少米处会尝试停车或沿障碍物滑行;
- AVOID_BEHAVE = 1:飞行器应在障碍物前停止 (1),还是绕过障碍物滑行 (0);
- AVOID_DIST_MAX = 1.5:在 AltHold 状态下,飞行器开始偏离障碍物的距离;
- AVOID_ANGLE_MAX = 3000:飞行器尽量偏离障碍物的程度。
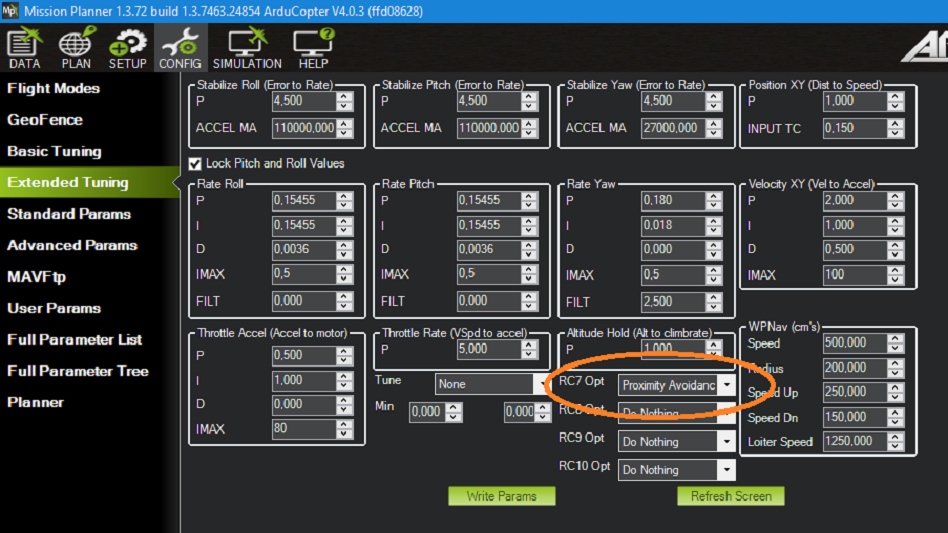
可选项:你可以指定一个 RC 开关来启用"避让",而不是默认的始终打开。在 Mission Planner 中设置 RC7 以打开"避让"的示例:
修改参数后,重新启动自动驾驶仪。
6 地面测试:飞行前验证
要验证 APSync 映像是否正常工作以及一切配置是否正确,请确保 ArduPilot 接收到 OBSTACLE_DISTANCE 消息,在 Mission Planner 上:按下 Ctrl+F 并单击 “Mavlink Inspector”(Mavlink 检查器),你应该可以看到输入的数据:
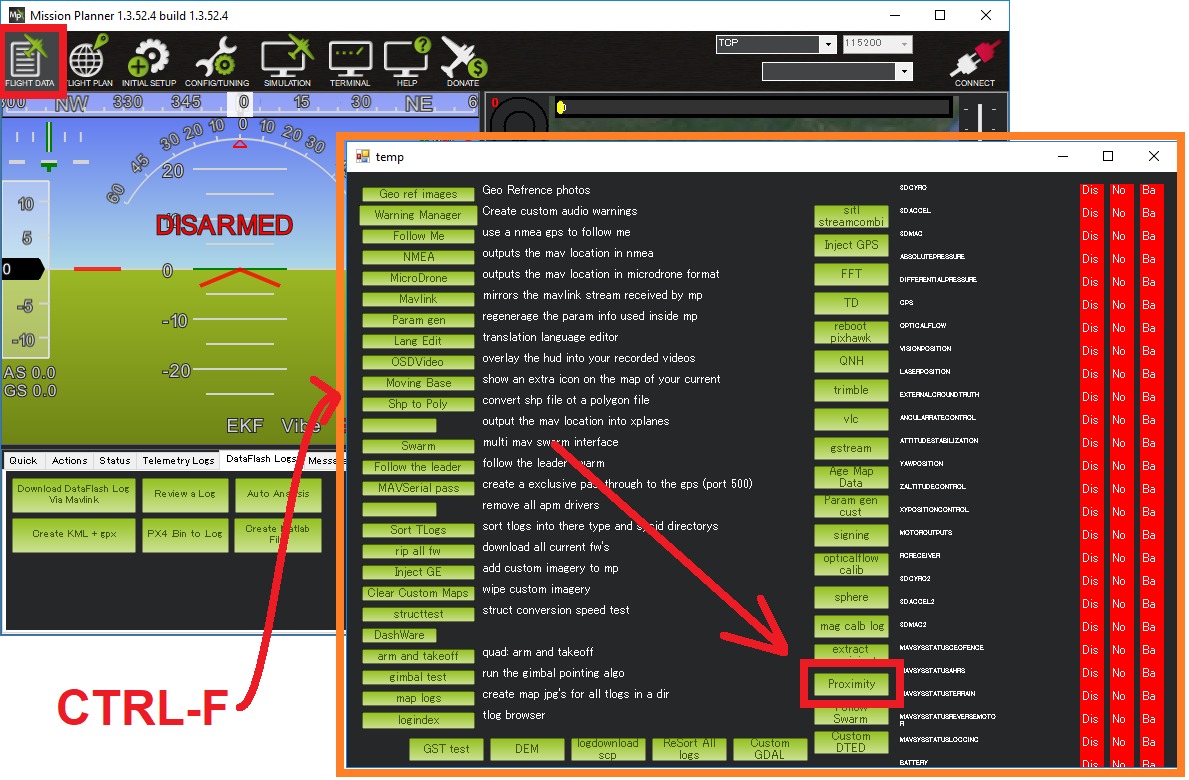
- 如果遥测连接稳定,OBSTACLE_DISTANCE 信息的数据频率应接近 15hz。如果不是,请使用 USB 电缆连接 AP 和 GCS,确保 AP 按预期接收到避障数据后再继续操作。
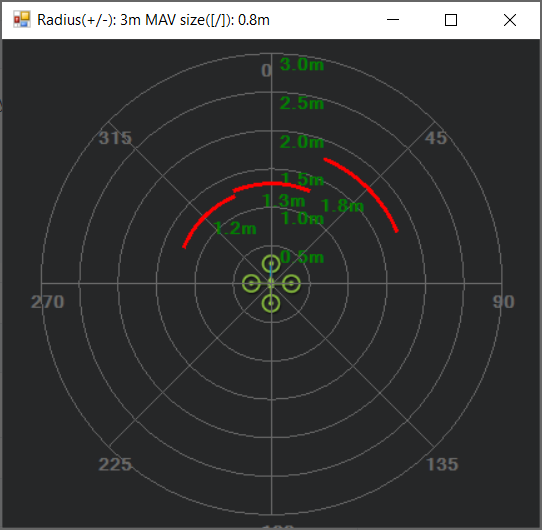
在 Mission Planner 中,打开 Proximity view (Ctrl-F > Proximity):
- 将飞行器/深度摄像头置于一些障碍物前方,检查距离最近的障碍物的距离是否准确,并显示在"接近"视图中;
写在最后
在结束之际,我想重申的是,学习并非如攀登险峻高峰,而是如滴水穿石般的持久累积。尤其当我们步入工作岗位之后,持之以恒的学习变得愈发不易,如同在茫茫大海中独自划舟,稍有松懈便可能被巨浪吞噬。然而,对于我们程序员而言,学习是生存之本,是我们在激烈市场竞争中立于不败之地的关键。一旦停止学习,我们便如同逆水行舟,不进则退,终将被时代的洪流所淘汰。因此,不断汲取新知识,不仅是对自己的提升,更是对自己的一份珍贵投资。让我们不断磨砺自己,与时代共同进步,书写属于我们的辉煌篇章。
需要完整版PDF学习资源私我
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:vip204888 (备注网络安全)

一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
K-1713668043585)]
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!

















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









