




 本文档详细介绍了如何在Autoware中通过界面和代码设置导入轨迹,涉及waypoint_loader节点的使用,包括配置数据文件、发布话题/based/lane_waypoints_raw。同时,解释了代码流程,如parseColumns函数去除数据中的空格,verifyFileConsistency检查文件有效性,以及根据文件格式加载不同版本的waypoints。最后提到了通过waypoint_loader.launch文件加载路径的方法。
本文档详细介绍了如何在Autoware中通过界面和代码设置导入轨迹,涉及waypoint_loader节点的使用,包括配置数据文件、发布话题/based/lane_waypoints_raw。同时,解释了代码流程,如parseColumns函数去除数据中的空格,verifyFileConsistency检查文件有效性,以及根据文件格式加载不同版本的waypoints。最后提到了通过waypoint_loader.launch文件加载路径的方法。
这里使用roslaunch runtime_manager runtime_manager.launch运行autoware的过程就不讲了,网上有很多教程。
这篇博客可以学到两点:
1.通过界面设置导入轨迹。
2.通过阅读代码理解导入轨迹过程。
(1)先设置waypoint_loader中app中multi_lane中的数据文件,这里为下载数据包中的地址。
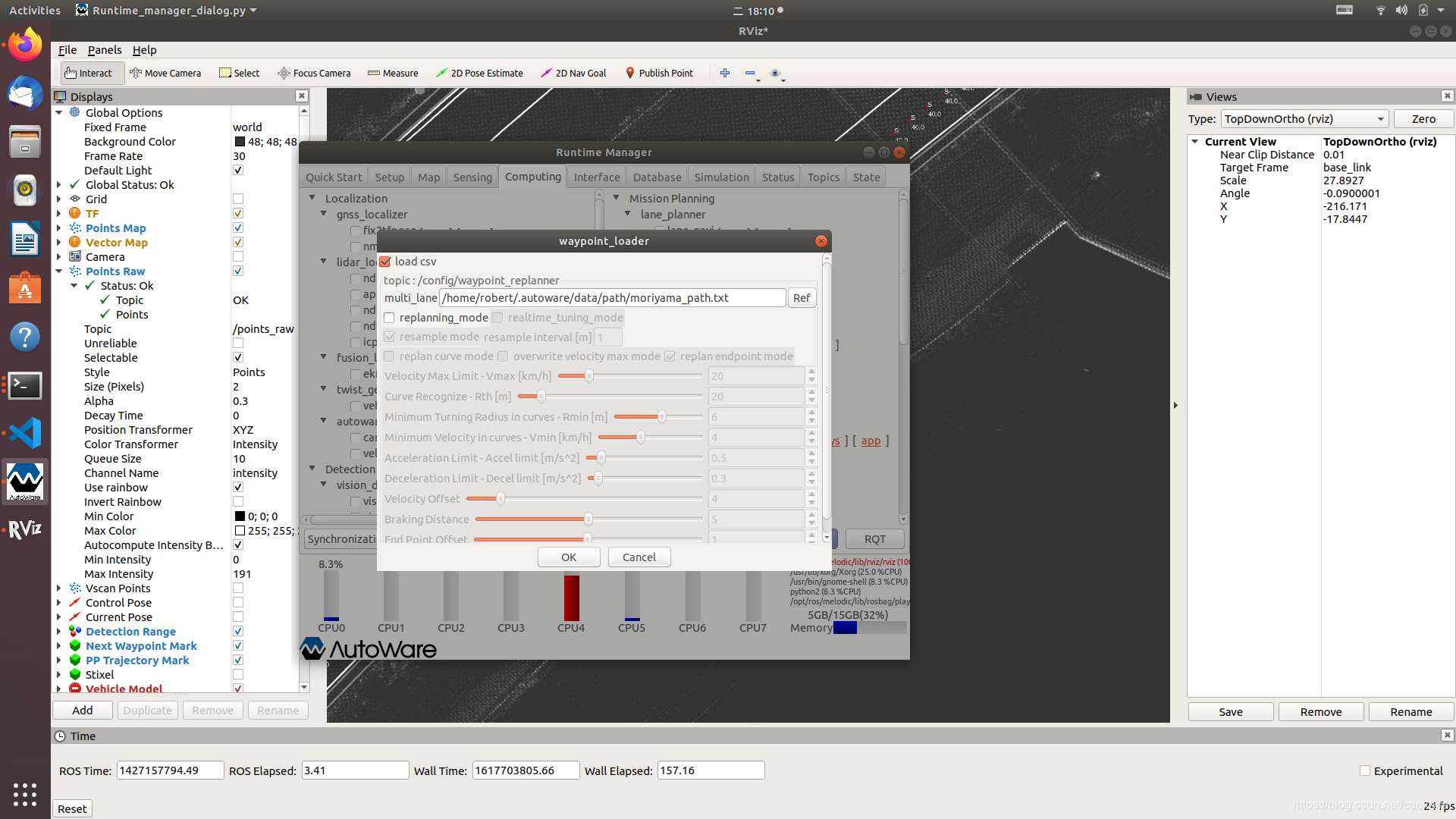
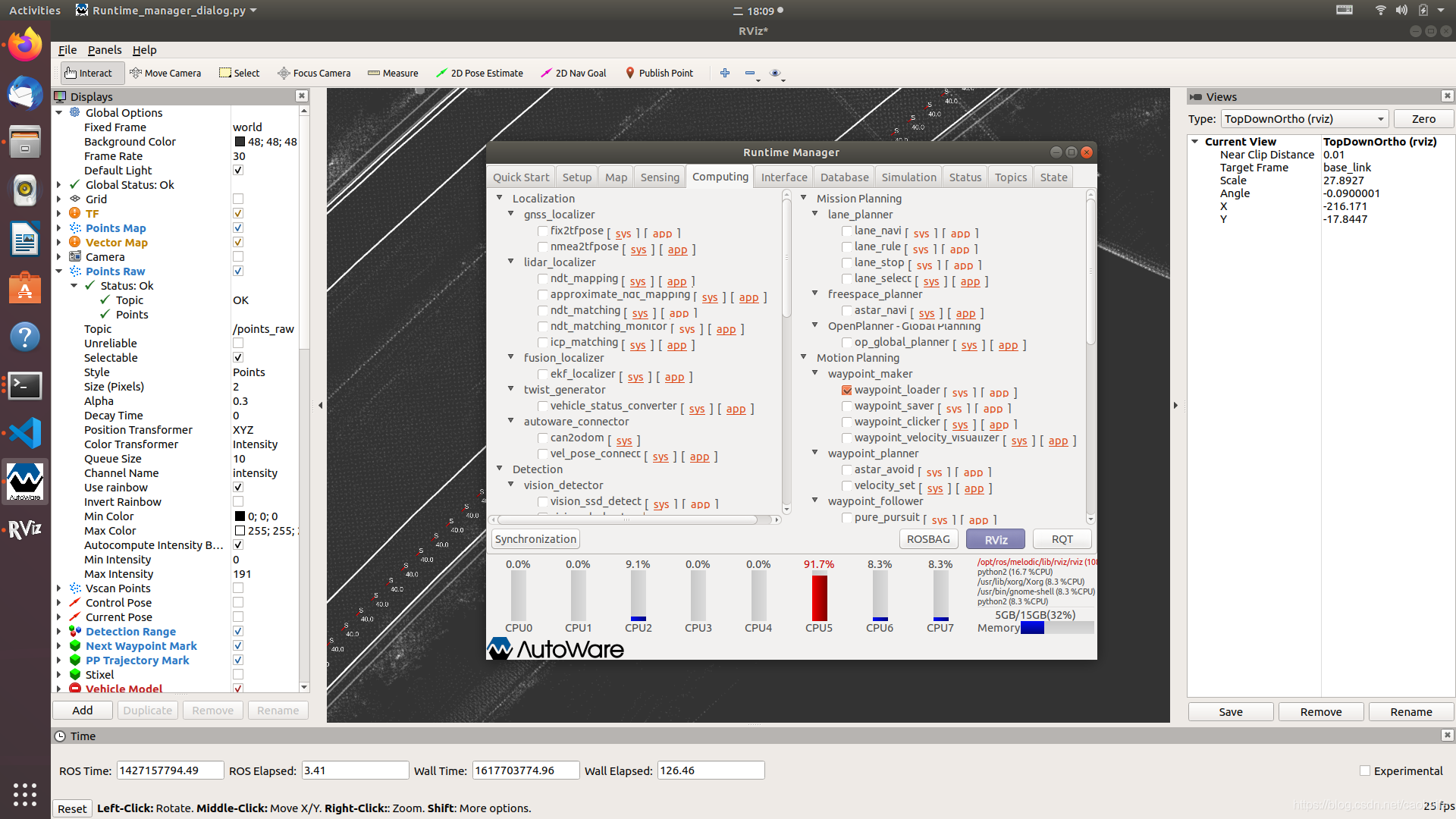
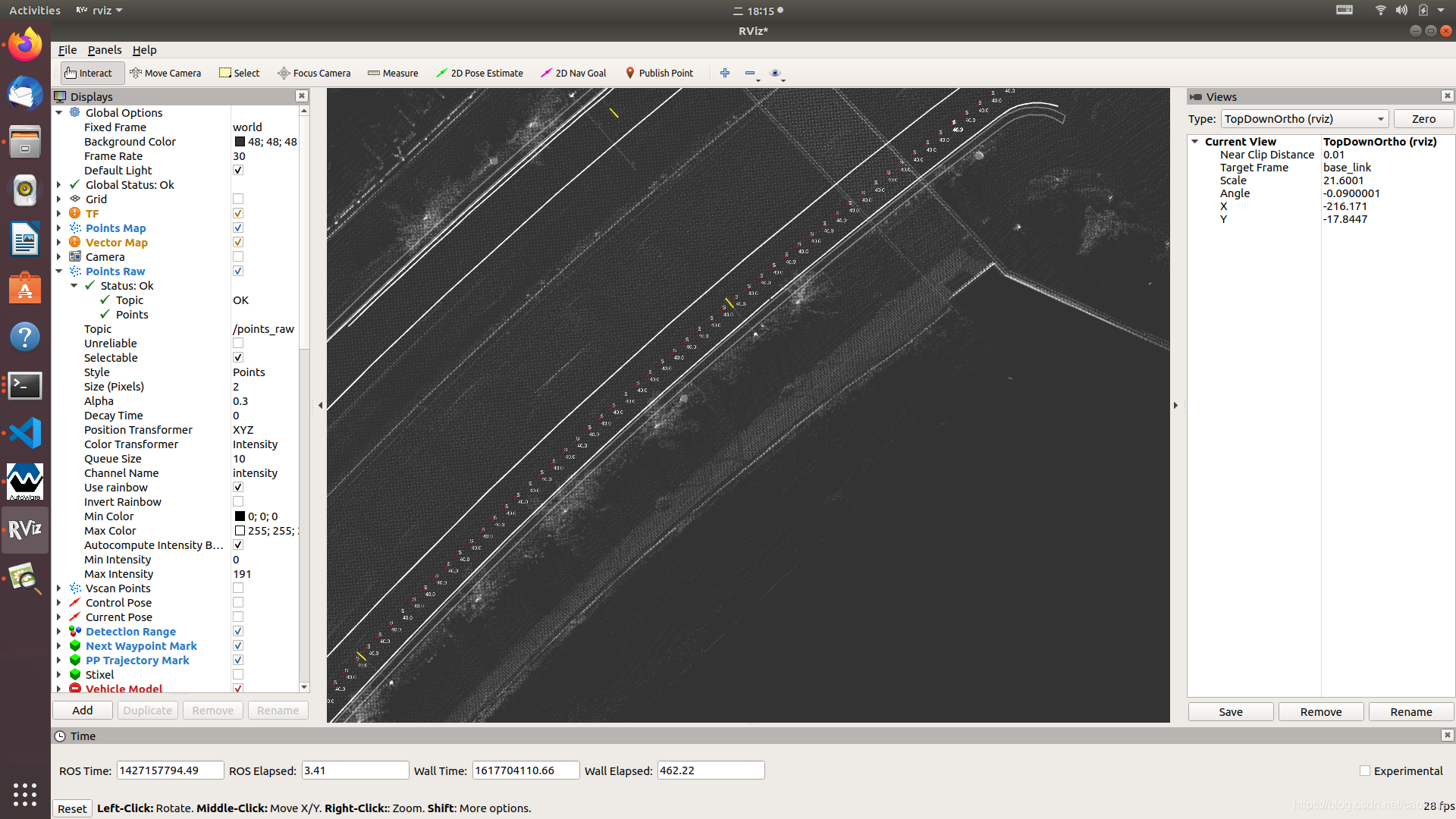
设置完,勾选就可以看见下图中的轨迹。
查看数据:
robert@robert-HP-ZBook-Firefly-14-G7-Mobile-Workstation:~$ rostopic echo /based/lane_waypoints_raw
ERROR: Cannot load message class for [autoware_msgs/LaneArray]. Are your messages built?
报错,这是由于autoware_msgs/LaneArray是自己定义的message数据类型,所以需要source一下工作空间。
cd autoeare.ai
source install/setup.bash
rostopic echo /based/lane_waypoints_raw
(2)这部分代码在core_planning/waypoint_maker/waypoint_loader中,
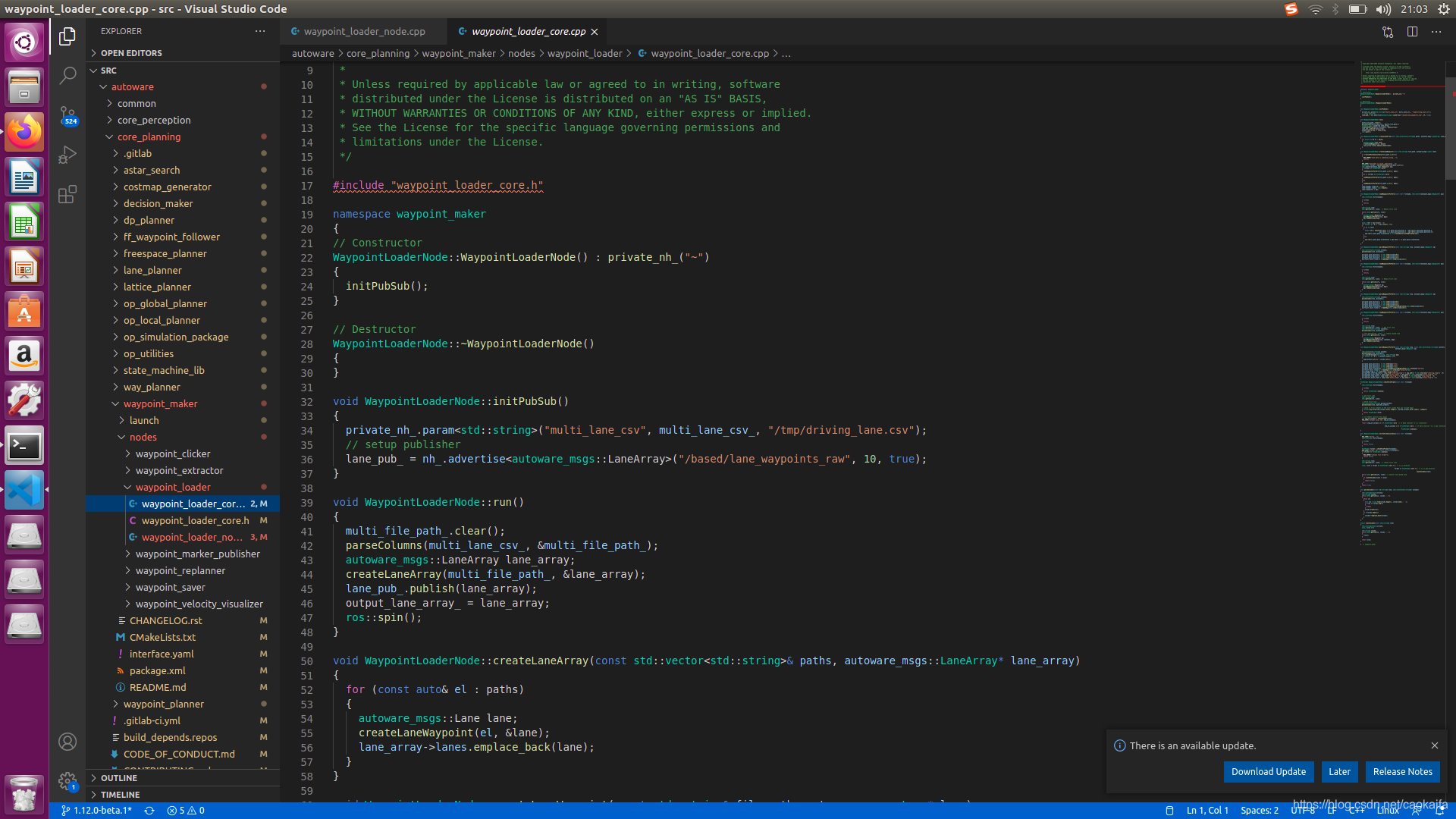
这个就是代码发布的话题:
void WaypointLoaderNode::initPubSub()
{
private_nh_.param<std::string>("multi_lane_csv", multi_lane_csv_, "/tmp/driving_lane.csv");
// setup publisher
lane_pub_ = nh_.advertise<autoware_m
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4481
4481

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









