




二维平面上,三个雷达对一个目标跟踪,输出观测平均与UKF(无迹卡尔曼滤波)两种算法的结果对比,包括轨迹图、误差曲线、误差统计特性等。
程序简介
程序实现基于无迹卡尔曼滤波(Unscented Kalman Filter, UKF) 的多雷达二维目标跟踪系统,适用于匀速运动模型(Constant Velocity Model)。系统利用三个空间分布已知的雷达节点对目标进行距离(Range)和方位角(Bearing) 联合测量,并通过非线性滤波实现对目标位置与速度的高精度估计。
主要功能
- 目标轨迹仿真:根据匀速运动方程与过程噪声生成动态目标的真实轨迹;
- 多雷达观测模拟:为三部固定雷达生成含噪声的距离与方位角观测;
- UKF滤波估计:通过Sigma点变换实现非线性状态与观测更新,无需Jacobian矩阵;
- 数据融合:采用序贯观测更新方式融合多雷达信息,提高估计精度与稳定性;
- 结果可视化与统计分析:输出轨迹对比、误差曲线、速度估计及协方差变化等图像,并自动计算RMSE及性能提升百分比。
模型与配置
-
状态向量:
x = [ x , , y , , v x , , v y ] T \mathbf{x} = [x, , y, , v_x, , v_y]^T x=[x,,y,,vx,,vy]T
其中 ((x, y)) 为二维位置,((v_x, v_y)) 为速度分量。 -
观测模型(非线性):
z = [ r θ ] z = \begin{bmatrix} r \ \theta \end{bmatrix} z=[r θ]
[ ( x − x r ) 2 + ( y − y r ) 2 a t a n 2 ( y − y r , , x − x r ) ] \begin{bmatrix} \sqrt{(x-x_r)^2 + (y-y_r)^2} \ \mathrm{atan2}(y-y_r,,x-x_r) \end{bmatrix} [(x−xr)2+(y−yr)2 atan2(y−yr,,x−xr)]
其中 ((x_r, y_r)) 为雷达位置。 -
滤波结构:
- 生成Sigma点;
- 状态预测与过程噪声注入;
- 序贯融合多雷达观测;
- 状态更新与协方差修正。
结果输出
程序将自动绘制以下结果图:
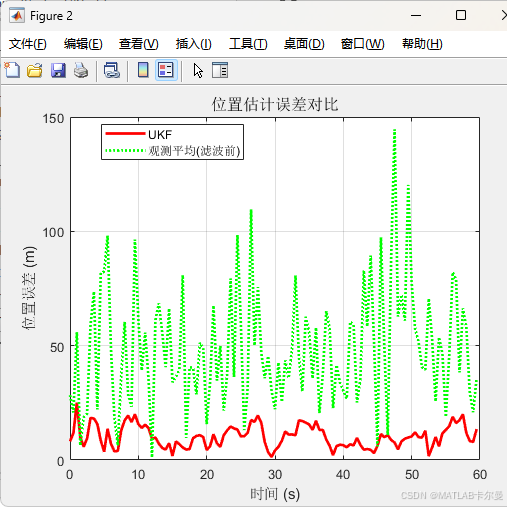
- 二维轨迹对比图(真实轨迹、UKF估计、观测均值);
- 位置误差与速度误差曲线;
- 协方差迹变化图(反映不确定性收敛趋势);
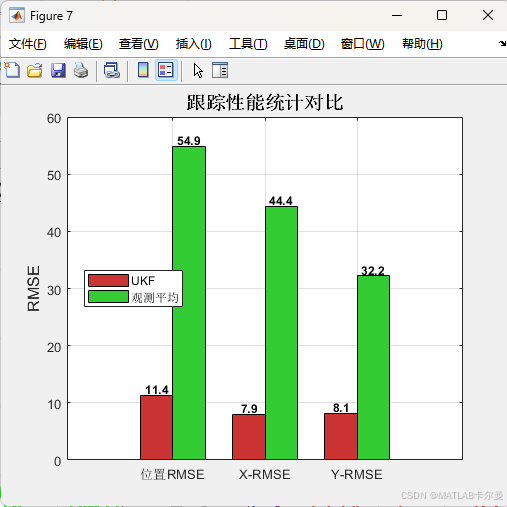
- 统计对比条形图,展示UKF滤波与直接观测的RMSE对比及性能提升比例。
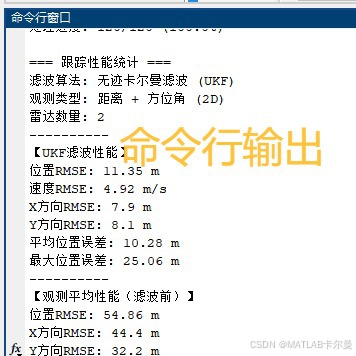
此外,命令行中输出详细的性能统计,包括:
- 位置与速度RMSE;
- 各轴误差;
- 平均/最大误差;
- 滤波前后性能改善百分比。
运行结果
轨迹对比图像:

速度与位置误差图像:
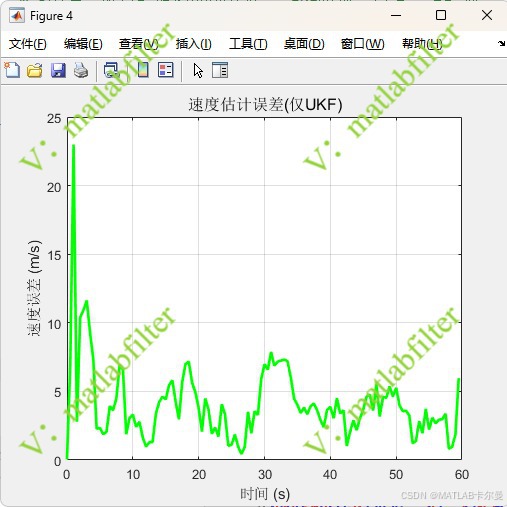
非滤波方法无法得到速度,所以速度误差仅有UKF的
误差统计特性:
MATLAB源代码
完整代码如下:
% 3雷达二维目标跟踪滤波系统 - EKF实现,匀速运动模型
% 输入:雷达观测数据(距离、方位角),输出:目标状态估计(位置、速度)
% 作者: matlabfilter
% 2025-11-09/Ver1
clc; clear; close all;
rng(0);
%% === 系统参数配置 ===
config = struct();
% 【可修改】基本参数
config.T = 0.5; % 采样周期 (s) - 可修改
config.total_time = 60; % 总仿真时间 (s) - 可修改
config.num_steps = config.total_time / config.T;
% 【可修改】雷达位置配置 [x, y] (m) - 固定位置,需要时可修改
radar_positions = [
0, 0; % 雷达1位置
2000, 0; % 雷达2位置
0,2000]; % 雷达3位置
% 【可修改】测量噪声标准差 - 根据实际雷达精度调整
config.sigma_range = 20; % 距离测量噪声标准差 (m)
config.sigma_bearing = 0.05; % 方位角测量噪声标准差 (rad) ≈ 2.86°
% 【可修改】过程噪声标准差 - 影响滤波器的跟踪能力
config.sigma_acc = 2.0; % 加速度过程噪声标准差 (m/s²)
% 【可修改】仿真参数
config.detection_prob = 0.95; % 检测概率 - 可调整丢失观测的概率
config.max_range = 15000; % 雷达最大探测距离 (m)
% 【新增】UKF参数
config.alpha = 1e-3; % Sigma点分布参数 (通常1e-4到1)
config.beta = 2; % 高斯分布最优值为2
config.kappa = 0; % 次级缩放参数 (通常为0或3-n)
%% === 初始化UKF滤波器 ===
完整代码:
https://download.youkuaiyun.com/download/callmeup/92270414
或:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 2747
2747

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











