





程序介绍
本代码实现了三维机动目标的 I M M − C K F IMM-CKF IMM−CKF跟踪算法,用于对具有多种运动模式的目标(如匀速、匀加速等)进行高精度跟踪。算法结合了交互多模型( I M M IMM IMM)框架与立方卡尔曼滤波(CKF)方法,针对目标在不同机动阶段(如匀速、转弯、爬升等)的动态变化,动态切换与融合CV(匀速)与CA(匀加速)两种运动模型,以提升跟踪鲁棒性与精度。
主要功能模块:
-
目标与观测仿真:构造三维空间中的真实机动轨迹与带噪声的观测数据。
-
IMM-CKF滤波器:
- 利用CV、CA两模型,通过IMM交互机制动态融合。
- 每个模型内通过CKF完成非线性预测与更新。
-
对比与评估:
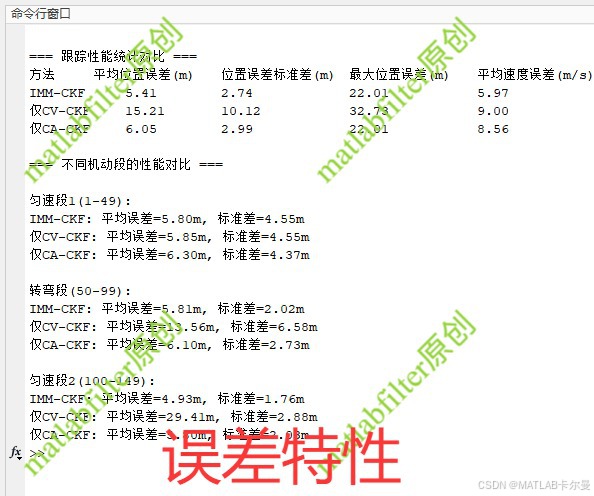
- 提供 I M M − C K F IMM-CKF IMM−CKF与仅使用 C V − C K F CV-CKF CV−CKF、 C A − C K F CA-CKF CA−CKF的跟踪精度对比。
- 统计整体误差及不同机动阶段的跟踪性能。
-
可视化与结果输出:
- 三维轨迹、位置误差、速度误差、模型概率随时间的演化等多种可视化图表。
- 自动统计平均误差、最大误差与标准差等指标。
运行结果
三维轨迹图如下,含各方法估计的轨迹对比:

三轴误差曲线,如下:

定位结果输出:
MATLAB源代码
部分代码:
%% 三维IMM-CKF目标跟踪例程
% 使用CV(匀速)和CA(匀加速)模型
% 作者:matlabfilter
% 2025-07-14/Ver1
clear; close all; clc;
rng(0);
%% 仿真参数设置
T = 0.1; % 采样时间
N = 200; % 仿真步数
dt = T;
%% 真实轨迹生成
% 设置真实轨迹(机动目标)
true_pos = zeros(3, N);
true_vel = zeros(3, N);
true_acc = zeros(3, N);
% 初始状态
true_pos(:,1) = [0; 0; 100];
true_vel(:,1) = [50; 30; -5];
true_acc(:,1) = [0; 0; 0];
% 生成机动轨迹
for k = 2:N
if k < 50
% 匀速运动
true_acc(:,k) = [0; 0; 0];
elseif k < 100
% 转弯机动
true_acc(:,k) = [2; 5; 0];
elseif k < 150
% 匀速运动
true_acc(:,k) = [0; 0; 0];
end
true_vel(:,k) = true_vel(:,k-1) + true_acc(:,k-1) * dt;
true_pos(:,k) = true_pos(:,k-1) + true_vel(:,k-1) * dt + 0.5 * true_acc(:,k-1) * dt^2;
end
%% 观测模拟
% 观测噪声协方差
% 生成观测
%% IMM-CKF参数设置
完整代码与内嵌的函数:
https://download.youkuaiyun.com/download/callmeup/91375848
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 260
260

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











