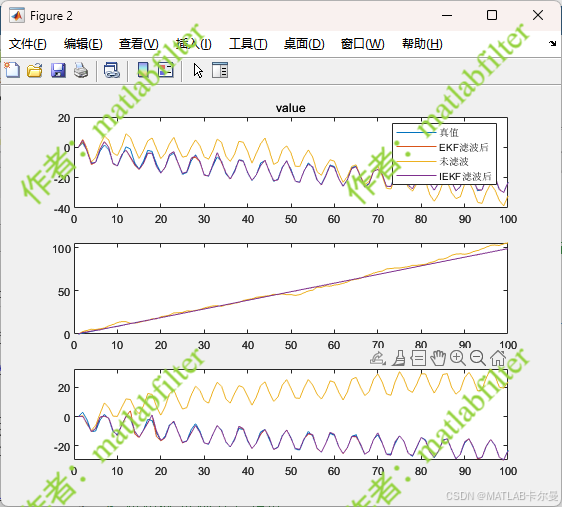
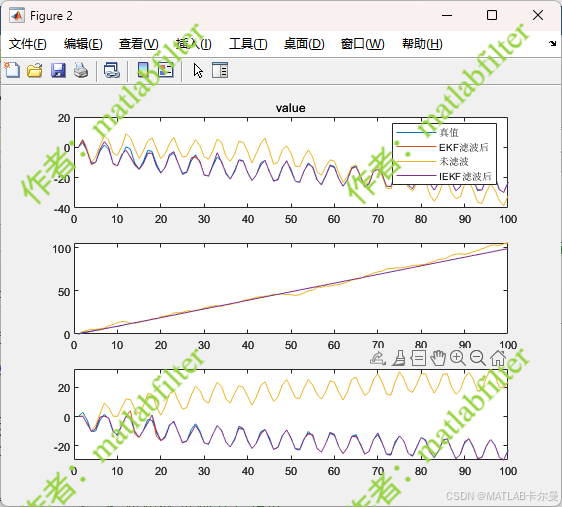
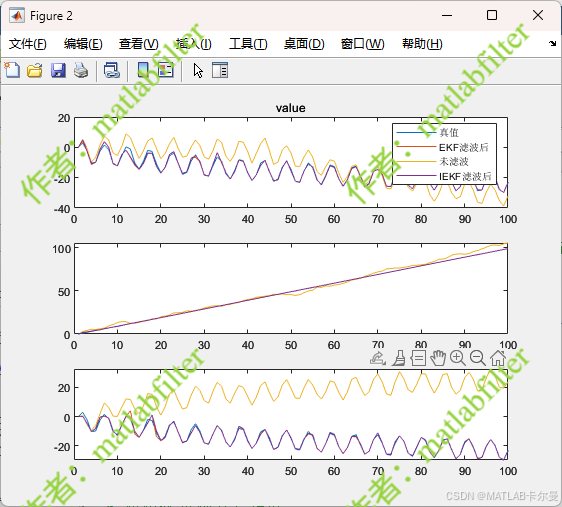
本代码实现了三维迭代扩展卡尔曼滤波(IEKF)算法,旨在通过滤波技术估计动态系统的状态。IEKF是一种针对非线性系统的状态估计方法,通常比传统的扩展卡尔曼滤波(EKF)提供更高的精度 订阅专栏后可直接查看源代码 文章目录 程序运行截图 MATLAB代码 程序介绍 非线性系统建模 EKF与IEKF对比 程序运行截图 三轴估计值: 三轴估计误差值: 误差统计特性输出: 程序结构如下: MATLAB代码 完整源代码: % 观测协方差矩阵不准确时,三维IEKF(迭代扩展卡尔曼滤波)与未滤波、经典EKF的对比,非线性的状态方程与观测方程 % 2024-12-02/Ver1
 1546
1348
165
1546
1348
165

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










 订阅专栏 解锁全文
订阅专栏 解锁全文

























