





本文所述的代码实现MVC和MCC的EKF,即:通过Versoria函数(MVC)和最大相关熵准则(MCC)优化滤波器在非高斯噪声条件下的鲁棒性。系统针对二维平面运动目标跟踪场景,重点解决观测异常值干扰下的状态估计问题
程序介绍
程序包含三大核心模块:
- 经典EKF实现:基于线性化近似的标准滤波流程
- MCC-EKF改进:通过高斯核函数抑制脉冲噪声影响
- MVC-EKF创新:采用Versoria加权函数优化协方差更新策略
系统模型数学描述
状态空间模型:
% 状态转移方程(线性)
f = @(x) [x(1) + 1; x(2) + 2];
% 观测方程(非线性极坐标)
h = @(x) [norm(x); atan2(x(2),x(1))];
对应的雅可比矩阵推导:
H = @(x) [x(1)/r, x(2)/r; % r = sqrt(x1²+x2²)
-x2/(x1²+x2²), x1/(x1²+x2²)];
噪声模型:
- 过程噪声: w k ∼ N ( 0 , Q ) w_k \sim \mathcal{N}(0,Q) wk∼N(0,Q), Q = 0.01 I 2 Q=0.01I_2 Q=0.01I2
- 观测噪声: v k ∼ N ( 0 , R ) + δ 10 < k < 30 ⋅ 10 v_k \sim \mathcal{N}(0,R) + \delta_{10<k<30} \cdot 10 vk∼N(0,R)+δ10<k<30⋅10, R = I 2 R=I_2 R=I2
核心算法公式
1. 经典EKF更新方程
预测步骤:
x
^
k
−
=
f
(
x
^
k
−
1
)
P
k
−
=
F
k
−
1
P
k
−
1
F
k
−
1
T
+
Q
\begin{aligned} \hat{x}_k^- &= f(\hat{x}_{k-1}) \\ P_k^- &= F_{k-1}P_{k-1}F_{k-1}^T + Q \end{aligned}
x^k−Pk−=f(x^k−1)=Fk−1Pk−1Fk−1T+Q
更新步骤:
K
k
=
P
k
−
H
k
T
(
H
k
P
k
−
H
k
T
+
R
)
−
1
x
^
k
=
x
^
k
−
+
K
k
(
z
k
−
h
(
x
^
k
−
)
)
P
k
=
(
I
−
K
k
H
k
)
P
k
−
\begin{aligned} K_k &= P_k^- H_k^T (H_k P_k^- H_k^T + R)^{-1} \\ \hat{x}_k &= \hat{x}_k^- + K_k(z_k - h(\hat{x}_k^-)) \\ P_k &= (I - K_k H_k)P_k^- \end{aligned}
Kkx^kPk=Pk−HkT(HkPk−HkT+R)−1=x^k−+Kk(zk−h(x^k−))=(I−KkHk)Pk−
MCC-EKF改进算法:
引入高斯核相关熵准则:
MCC = @(y, y_pred) exp(-0.5*((y - y_pred)/sigma).^2); % σ=2
更新方程为:
x
^
k
=
x
^
k
−
+
diag
(
w
M
C
C
)
⋅
K
k
(
z
k
−
h
(
x
^
k
−
)
)
\hat{x}_k = \hat{x}_k^- + \text{diag}(w_{MCC}) \cdot K_k (z_k - h(\hat{x}_k^-))
x^k=x^k−+diag(wMCC)⋅Kk(zk−h(x^k−))
其中权重
w
M
C
C
w_{MCC}
wMCC通过核函数计算,能有效抑制脉冲噪声
MVC:
采用Versoria加权函数优化协方差更新:
MVC = @(y, y_pred, R) exp(-0.5*(y-y_pred).^2./R); % Versoria函数
更新过程:
w
M
V
C
=
3
2
σ
v
2
(
1
+
(
z
k
−
h
(
x
^
k
−
)
)
2
σ
v
2
)
−
1
x
^
k
=
x
^
k
−
+
w
M
V
C
K
k
(
z
k
−
h
(
x
^
k
−
)
)
\begin{aligned} w_{MVC} &= \frac{3}{2\sigma_v^2} \left(1 + \frac{(z_k - h(\hat{x}_k^-))^2}{\sigma_v^2}\right)^{-1} \\ \hat{x}_k &= \hat{x}_k^- + w_{MVC} K_k (z_k - h(\hat{x}_k^-)) \end{aligned}
wMVCx^k=2σv23(1+σv2(zk−h(x^k−))2)−1=x^k−+wMVCKk(zk−h(x^k−))
该函数通过自适应调整增益矩阵,增强对异常值的鲁棒性
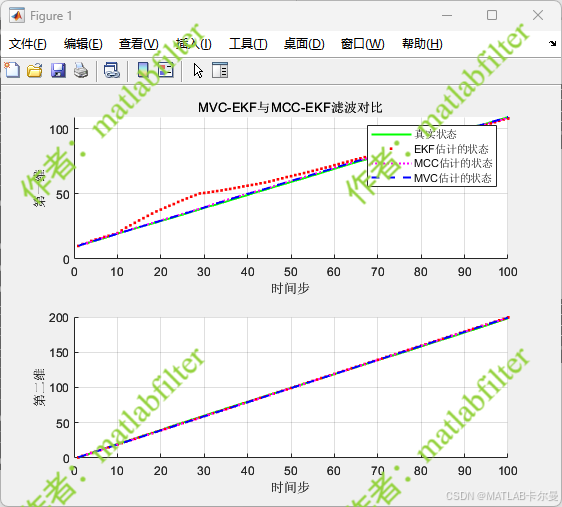
运行结果
状态曲线:
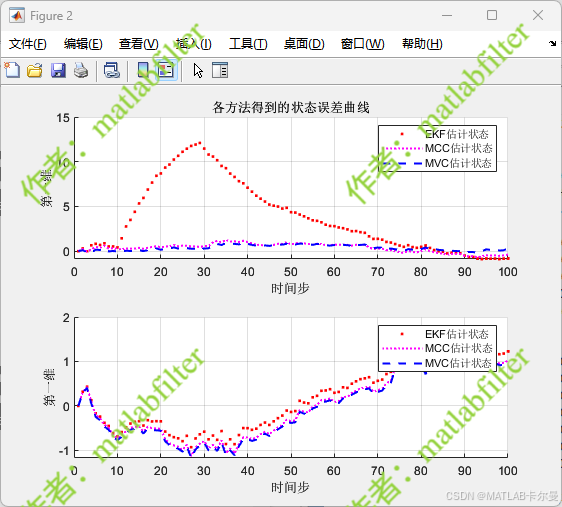
状态误差曲线:
MATLAB代码
程序结构如下:
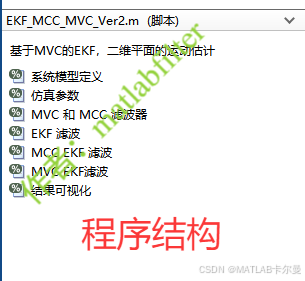
部分源代码:
% 基于MVC的EKF,二维平面的运动估计
% 核心:目标跟踪或状态估计,通过Versoria函数优化协方差更新
% 2025-05-08/Ver1
% 2025-06-09/Ver2:MVC和MCC的对比,修复bug
clear; clc; close all;
rng(0);
%% 系统模型定义
% 定义状态空间模型
% x(k+1) = f(x(k)) + w(k)
% y(k) = h(x(k)) + v(k)
% 非线性状态转移函数
f = @(x) [x(1) + 1; x(2) + 2];
% 非线性观测函数(距离与角度)
h = @(x) [(x(1)^2+x(2)^2)^0.5; atan(x(2)/x(1))];
% f 和 h 的雅可比矩阵
F = @(x) [1, 0; 0, 1]; % f 的雅可比矩阵
% H = @(x) [2 * x(1), 1]; % h 的雅可比矩阵
H = @(x) [x(1)*(x(1)^2+x(2)^2)^(-0.5),x(2)*(x(1)^2+x(2)^2)^(-0.5);
-x(2)/(x(1)^2+x(2)^2),x(1)/(x(1)^2)+x(2)^2]; % h 的雅可比矩阵
% 噪声协方差矩阵
Q = 0.01 * eye(2); % 过程噪声协方差
R = diag([1,1]); % 测量噪声协方差
%% 仿真参数
n = 2; % 状态维度
N = 100; % 时间步数
x_true = zeros(n, N); % 真实状态
x_est_ekf = zeros(n, N); % MCC 估计状态
x_est_mcc = zeros(n, N); % MCC 估计状态
x_est_mvc = zeros(n, N); % MVC 估计状态
y_meas = zeros(2, N); % 测量值
% 初始状态
x_true(:, 1) = [10; 1];
x_est_ekf(:, 1) = [10; 1];
x_est_mcc(:, 1) = [10; 1];
x_est_mvc(:, 1) = [10; 1];
% 随机生成有噪声的测量值
for k = 1:N
y_meas(:,k) = h(x_true(:, k)) + diag(sqrt(R) ).* randn;
if 10<k && k<30
y_meas(:,k) = h(x_true(:, k)) + diag(sqrt(R) ) * randn + 10; %特定时刻的异常值
end
if k < N
x_true(:, k+1) = f(x_true(:, k)) + sqrt(Q) * randn(n, 1);
end
end
%% MVC 和 MCC 滤波器
% 初始估计误差协方差
P_ekf = eye(n); % 经典EKF 初始误差协方差
P_mcc = eye(n); % MCC 初始误差协方差
P_mvc = eye(n); % MVC 初始误差协方差
% 定义 MCC 函数(高斯核相关熵)
完整代码下载链接:https://download.youkuaiyun.com/download/callmeup/91092768
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











