



最近一直在挑选合适的雷达来做自己的研究课题,毫米波雷达在自动驾驶领域非常热门,但是对于海浪测量来说还是比较冷门,主流的测波方法都是浮标、电容式测波仪或者是压力计,但还是能够收集到一些使用毫米波雷达进行波浪测量的论文和专利,发现有几个课题组使用的是TI的毫米波雷达,像中海洋使用的是IWR1642雷达板,中科院使用的是AWR2243型号的毫米波雷达,于是开始在TI里面挑选符合需求的毫米波雷达。
在TI的毫米波雷达传感器中,分为两个大类:1.工业毫米波雷达传感器,2.汽车毫米波雷达传感器
1.工业毫米波雷达传感器(Industrial mmWave radar sensors)
先从工业级毫米波雷达传感器开始选型,下图是TI官网的资料,TI的资料齐全也是选择TI毫米波雷达的原因之一。
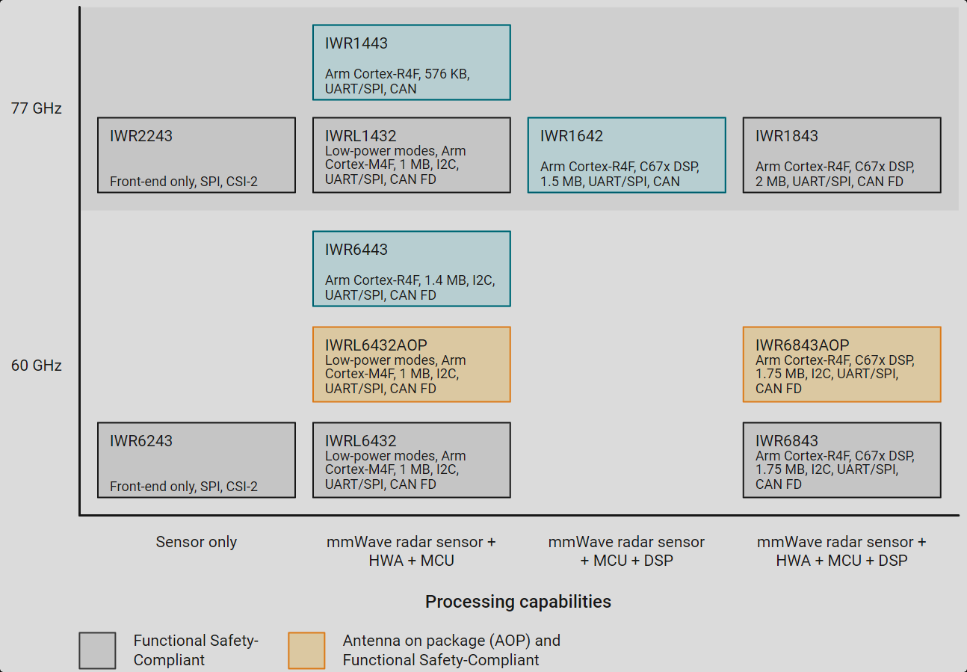
下图的纵轴为工作频段,分为77GHz和60GHz两个频段,横轴描述的是芯片集成的处理能力(Processing capabilities),从左到右,能力由弱到强。
- Sensor only:只包含雷达前端,没有集成的处理器,需要外接处理器进行数据处理;
- mmWave radar sensor + HWA + MCU:集成了雷达前端、硬件加速器(HWA)和微控制器(MCU);
- mmWave radar sensor + MCU + DSP:集成了雷达前端、微控制器(MCU)和数字信号处理器(DSP);
- mmWave radar sensor + HWA + MCU + DSP :功能最全,集成了上述所有单元
灰色方框表示该芯片符合功能安全标准,橙色方框表示这是一款天线封装产品,并且符合功能安全标准。
由于我的课题并不考虑对雷达本身进行开发,所以对天线封装在芯片里没有硬性要求,不像自动驾驶中对硬件设计有尺寸要求。
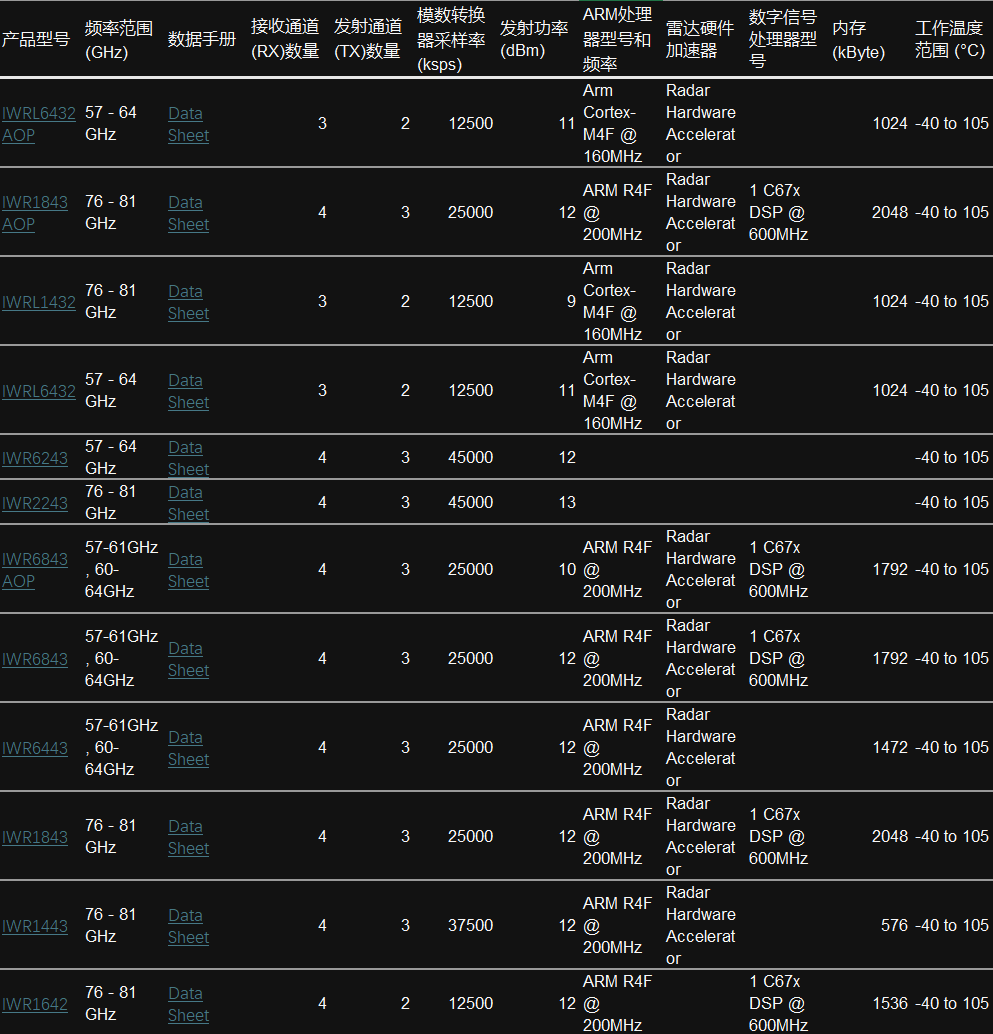
以上是对工业毫米波雷达传感器的一个大致了解,下面是不同型号的工业毫米波雷达传感器的一些具体参数,以方便后续进行雷达的选型:
通常情况下,77GHz频段用于ADAS汽车应用以及流体罐液位感应等应用,而60GHz频段通常可用于车内应用(例如儿童存在检测)以及商业应用(例如家庭老人摔倒检测)
此外,雷达测速是基于多普勒效应,回波的相位变化与目标的速度相关,目标移动半个波长的距离,相位就会变化360°,而77GHz的波长相较于60GHz的波长要更短,所以对于77GHz的雷达,速度测量精度具有先天优势。并且车规雷达普遍使用77GHz频段,往往高性能的雷达芯片都出现在车规级,因为汽车行业的需求推动了雷达技术的快速发展,所以对于研究课题来说,优先使用77GHz频段更合适。
2.汽车毫米波雷达传感器(Automotive mmWave radar sensors)
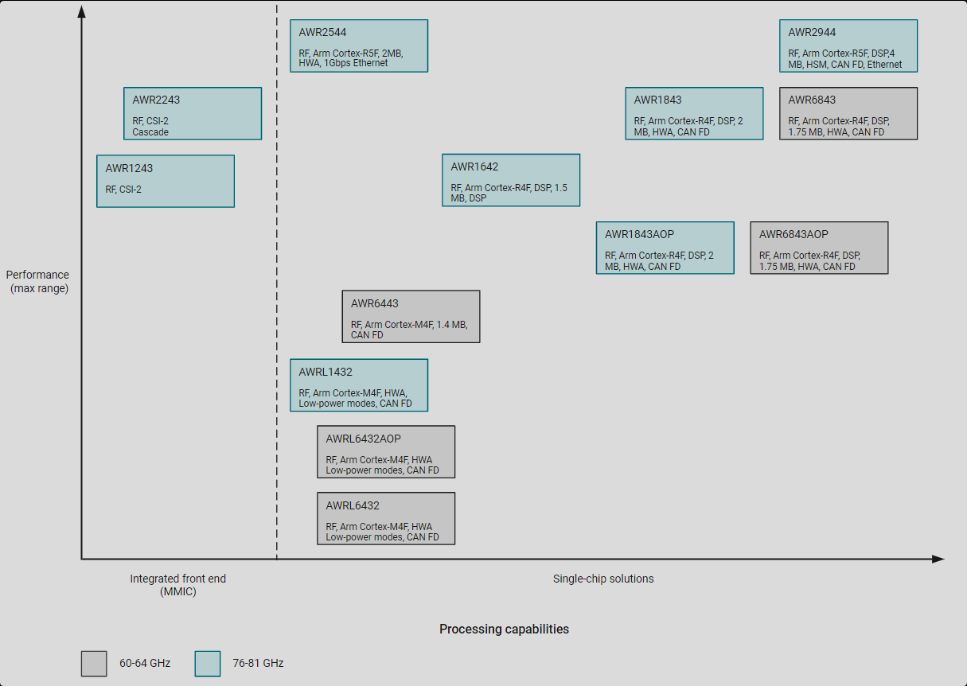
下图展示的是TI毫米波雷达的车规级设备,纵轴表示最大距离,从下往上芯片能够实现的最大探测距离越远,横轴表示处理能力,从左到右,芯片的集成度和处理能力越强。
此外,左侧,集成射频前端(Integrated front end(MMIC)),这些型号的雷达不包含处理单元,只负责发射和接收毫米波信号,然后通过高速接口(SCI-2)将原始数据发送给外部逢独立处理器,AWR2243方框中的Cascade表示可以将多个这样的芯片并联工作,以达到更高分辨率的成像雷达。右侧为单芯片解决方案,在一颗芯片内同时集成了射频前端、MCU、DSP、硬件加速器。
灰色方框表示芯片工作在60-64GHz,蓝色方框表示芯片工作在76-81GHz。
车规级和工业级毫米波雷达的主要区别在于,车规级芯片经过了更严格的AEC-Q100认证,由于老师给我提出的应用场景较为恶劣,所以我优先考虑在车规级芯片中进行选择。
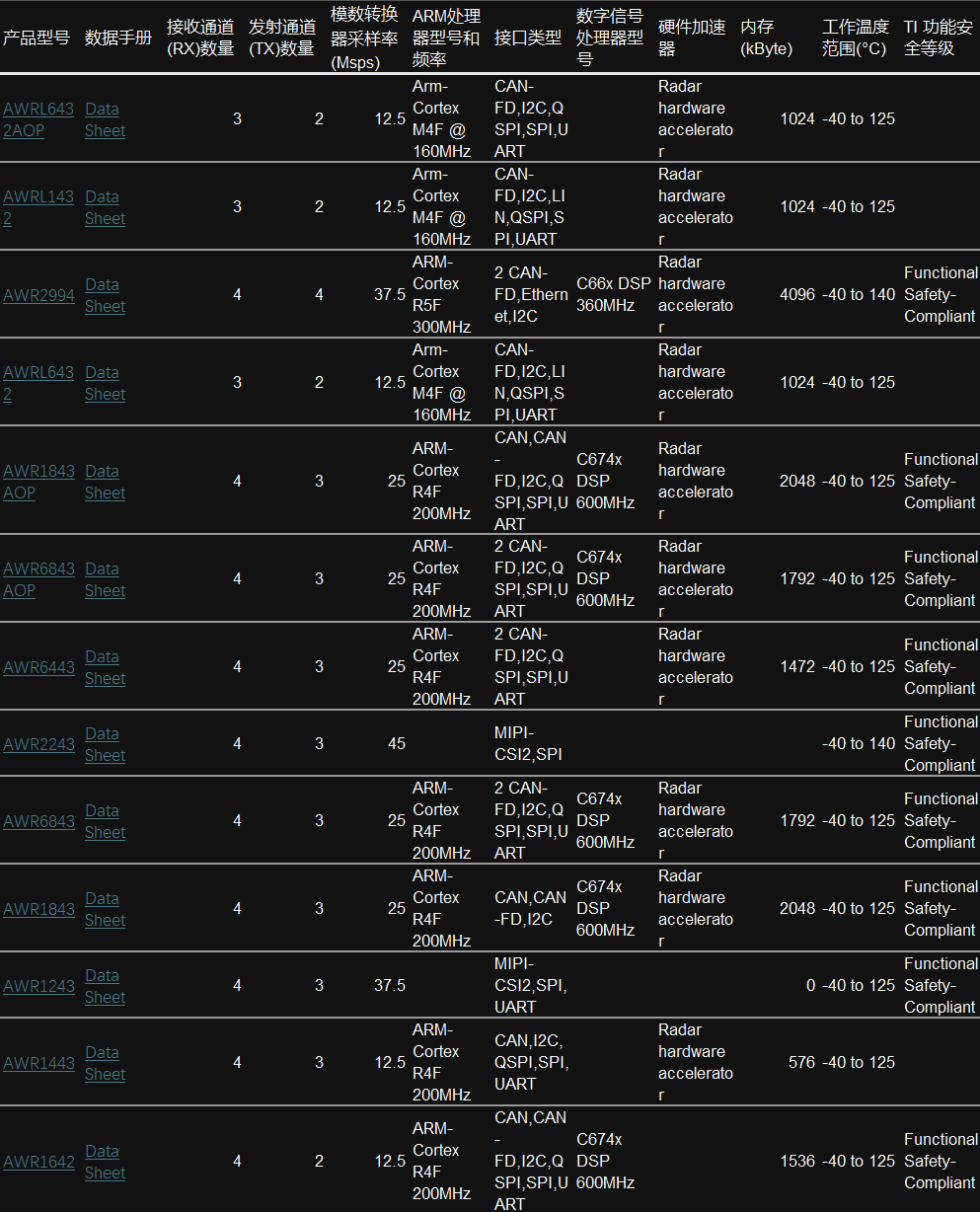
下图是车规级产品的具体参数选型表,综合考虑性能要求,选择了3发4收及以上的组合,并且采样频率应该不小于15Msps(通过香农采样定理计算得到,ADC的采样率必须大于等于信号最高频率的两倍,才能无失真地回复原始信号,当调频带宽为4GHz,探测距离为10m时)
综上所述,满足77GHz发射频率,12虚拟天线及以上的天线要求,大于15Msps的采样频率,集成有相应性能的MCU、DSP的车规级毫米波雷达,只剩下AWR1843与AWR2944,AWR6843也是一个相对优秀的备选方案,但是之前讨论过,77GHz对60GHz的天然优势,所以这里不做选择。
对于AWR2944,这是TI产品线中的顶级型号,是为下一代高级辅助驾驶和自动驾驶设计的顶级芯片,核心应用是高分辨率4D成像雷达,对于我的课题研究,AWR2944的很多核心优势都有些功能冗余,AWR1843已经能够充分满足我的参数需求,因此,在考虑了性能、成本等需求后,最终选择AWR1843。
如果想要更全面的了解相关信息,可以去官网继续学习,欢迎大家交流学习


















 3605
3605

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









