



前置要求
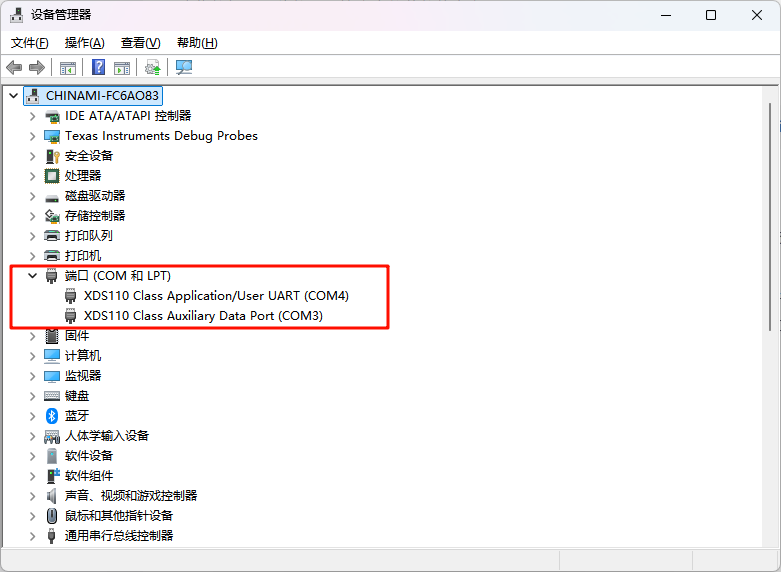
在下载了XDS110调试适配器后,就可以在设备管理器中看到两个端口,将鼠标放在开始菜单上,点击右键选择设备管理器,在端口这一栏,就可以看到两个新的端口(如下图所示),其中XDS110 Class Application/User UART是CLI端口,另一个XDS110 Class Auxiliary Data Port是数据端口。
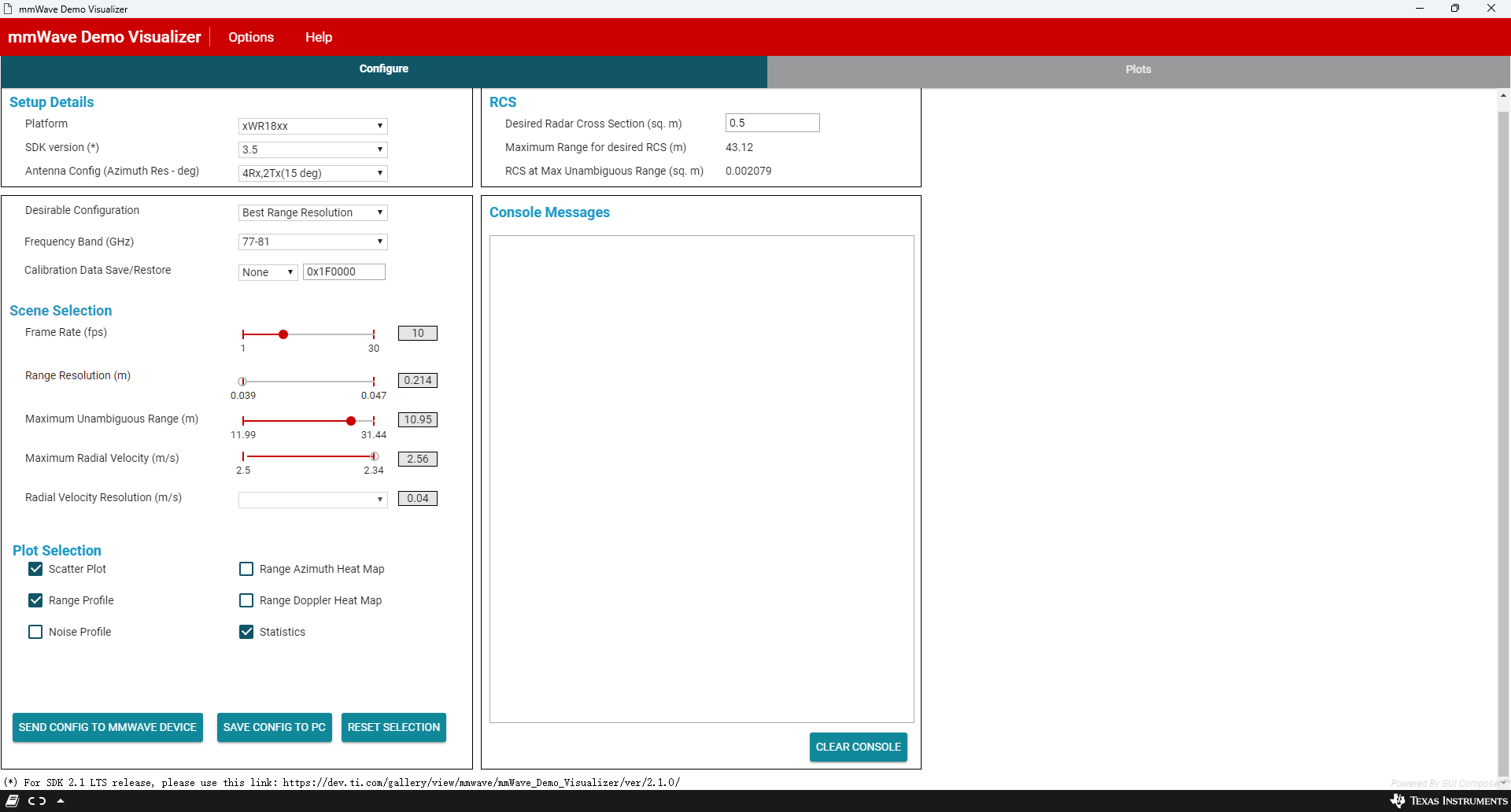
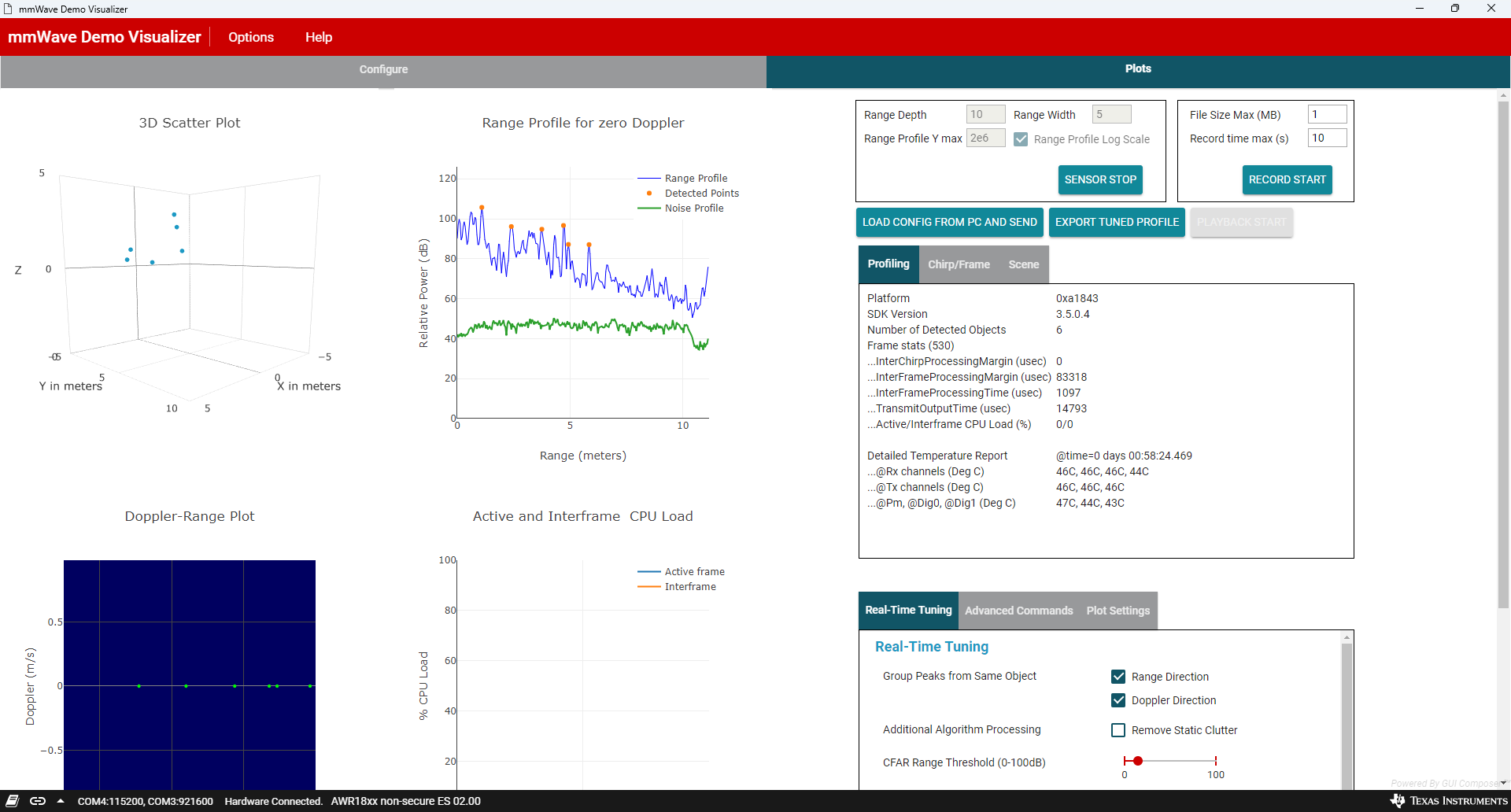
 在用uniflash给雷达烧写好官方提供的demo程序之后,就可以打开mmwave demo visualizer,进入以下界面:
在用uniflash给雷达烧写好官方提供的demo程序之后,就可以打开mmwave demo visualizer,进入以下界面:
端口连接
接下来按照步骤一步一步配置,在Option中,选择好上面在设备管理器中查到的端口号,这里我的命令行端口是COM4,数据端口是COM3,如果之后需要使用串口调试助手取雷达的数据,记住这里命令行端口的波特率是115200,数据端口的波特率是921600,选择这两个推荐的波特率能够确保设备间的通信更加稳定。 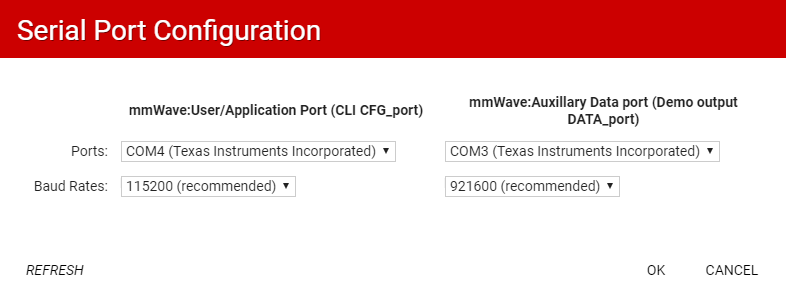 配置完成后,点击ok,就可以在初始界面的左下角看hardware connected,表示串口连接成功
配置完成后,点击ok,就可以在初始界面的左下角看hardware connected,表示串口连接成功![]()
Configure
Setup Details
对于细节设置,平台选择我们自己手上雷达的型号,SDK版本选择我们下载的版本号,里面有官方的demo程序

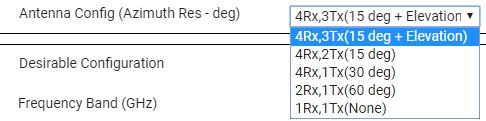
天线配置的下拉菜单中,对于awr1843有五个型号,这里解释我选择的型号含义,4Rx,3Tx指的是4个接收天线和3个发射天线,15deg代表15°的方位分辨率(方位分辨率指的是雷达在水平面内辨别不同目标方向的能力,它决定了系统能够分辨两个相邻目标的最小角度),elevation表示具有仰角设置。
Scene Selection
接下来分别介绍下图选项:
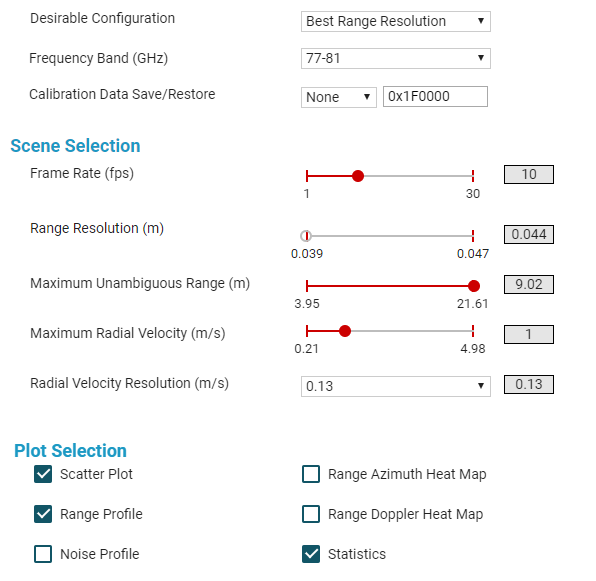
Desirable Configuration(理想选择):下拉菜单中有三种选择,最佳距离分辨率、最佳速度分辨率和最佳范围。大家可以根据自己的需求进行选择。
Frequency Band(GHz)(频率范围):共有两种选择,一种是宽带(77-81GHz)和窄带(76-77GHz),这会影响毫米波雷达的距离分辨率。
Calibration Data save/Restore(校准数据保存/恢复)
在场景选择中:
Frame Rate(fps)(帧率):这是一个滑块,可以选择测量数据从毫米波器件输出的速率,如果要画距离方位热图或者距离多普勒热图,这里就要选择1Hz,否则毫米波雷达没有足够的帧持续时间来通过UART来传送每一帧的数据。如果选择两张除了热图以外的绘图,就需要选择10帧左右的帧速率。
Range Resolution(m)(距离分辨率):点云中检测到的物体或点之间预期的最小间隔量。
Maximum Unambiguous Range(m)(最大不模糊距离):这里根据我们希望雷达检测到的物体的最远距离来选择,也可以通过右边的雷达界面以及使用毫米波技术理论上可以检测到的雷达截面相等的物体的实际距离。
RCS
该文本框可以根据我们所选择的RCS,来获得该RCS物体下的最大距离,比如这里选择的是0.5,那么最大距离就是34.208m,最后一行是在我们选择的最大不模糊距离下的RCS是多少,可以提供参考。
Maximum Radial Velocity(m/s)(最大径向速度):此滑块表示期望目标在雷达视场内移动的最大径向速度,径向方向为目标和传感器之间的直线距离方向。
Radial Velocity Resolution(m/s)(径向速度分辨率):表示在雷达系统中,能够准确区分不同径向速度的最小速度差。
绘图设置
散点图:由毫米波雷达检测到的物体列表,并将其显示在散点图和多普勒距离图上;
距离曲线:启用由毫米波雷达发送的对数幅度距离曲线数据(在零多普勒下),第0多普勒是指目标与雷达之间的相对速度为零的情况,此时,返回信号的频率与发射信号的频率完全相同;
噪声曲线:启用毫米波雷达发出的对数幅度噪声曲线数据;
距离方位热图:为所有距离库和所有天线启用由毫米波雷达发出的零多普勒雷达立方体矩阵,将其显示在plots的距离方位热图上;
距离多普勒热图:启用由毫米波雷达发出的整个检测矩阵,并显示在plots的距离多普勒热图上。
注意:如果选择距离方位热图和距离多普勒热图,需要将帧速率设置为1fps,否则毫米波雷达没有足够的帧持续时间来通过UART发送每帧数据。
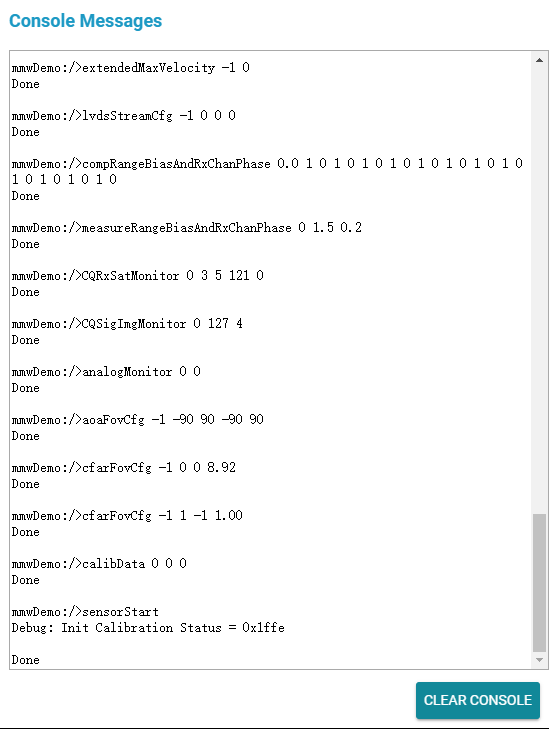
在绘图选择上,如果我们选择以上的散点图、距离曲线、噪声曲线以及统计,点击该选项![]()
此时,在控制台消息显示屏可以看到,成功执行该按钮的结果是向器件发送最后一条命令sensorStart,并从器件接收到一个响应Done。
plots如下图所示:
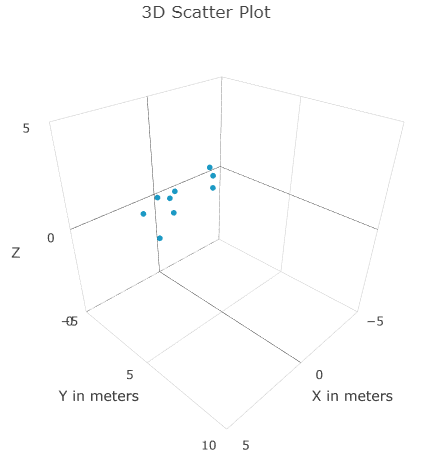
3D散点图
三维散点图,展示在三维空间中多个点的位置,横坐标、纵坐标和Z坐标分别表示X、Y、Z轴上的位置,单位是 m,反映了目标的横向、纵向和高度位置。
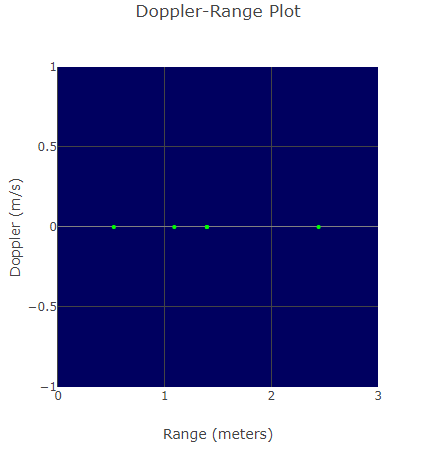
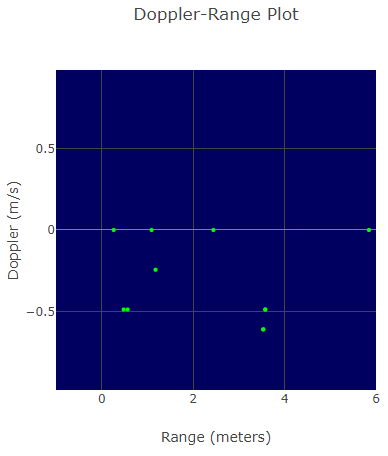
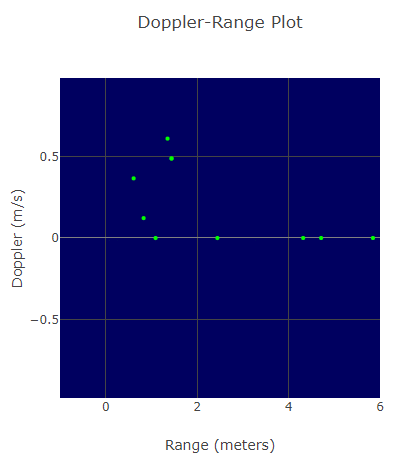
多普勒距离图
展示在不同距离下目标的多普勒速度,横坐标表示目标与雷达之间的距离,单位为 m,纵坐标表示目标的径向速度,单位是 m/s,绿色点表示在特定距离处检测到目标及其对应的多普勒速度,这里我做了测试,远离雷达运动是正直,靠近雷达运动是负值。
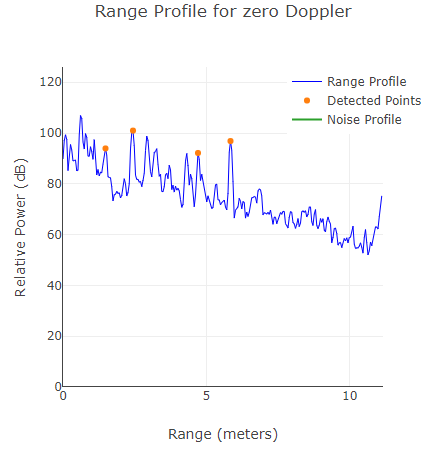
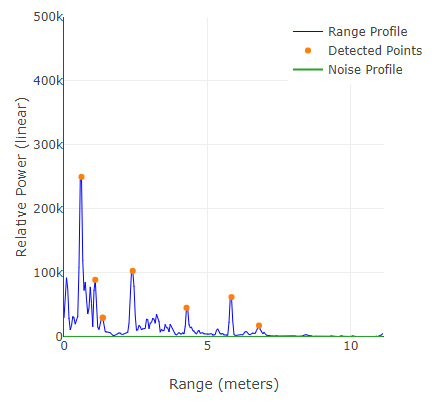
距离曲线
蓝线显示了第0个多普勒(静态物体)的距离曲线,绿线表示噪声曲线(在绘图选择那里勾选噪声曲线),第0个多普勒距离库中检测到的物体在蓝色曲线图线上显示为橙色圆点标记。横坐标表示目标与雷达之间的距离,单位为 m,纵坐标表示返回信号的相对功率,单位是 db,这个坐标反映了接收到的信号强度。
这张图主要目的在于展示在零多普勒状态下,雷达通过分析不同距离处的信号功率,检测目标的存在,通过橙色点的高度与蓝色曲线的高度,可以判断这些目标的相对强度是否足够明显,从而确认他们的存在。
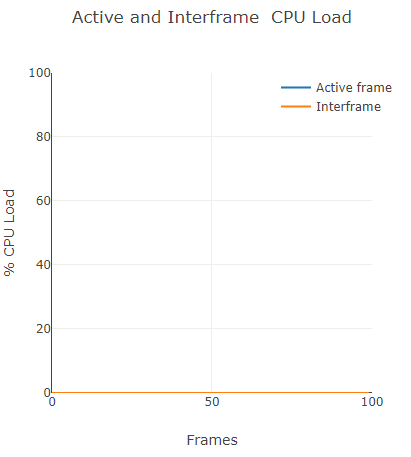
CPU负载
这是关于活跃帧和帧间的CPU负载图,横坐标表示帧的时间序列,纵坐标表示CPU负载的百分比,蓝色线表示在活跃帧处理时的CPU负载,橙色线表示在帧间处理时的CPU负载。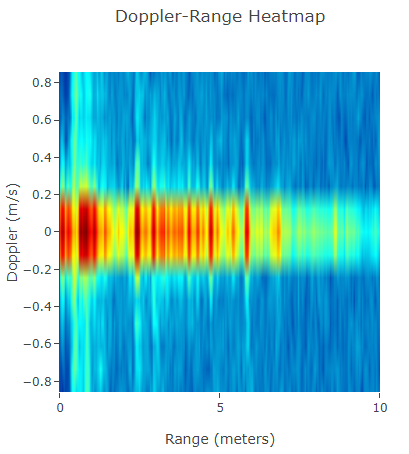
距离多普勒热图
这张图用于可视化在不同距离和多普勒速度下的信号强度,横坐标表示与雷达的距离,单位是 m,纵坐标表示目标的径向速度,单位是 m/s,热图的颜色范围显示了信号强度的变化,红色区域表示较高的信号强度,表示在该距离检测到较强的目标,深蓝色代表较低的信号强度,表明在这些位置没有明显的目标。
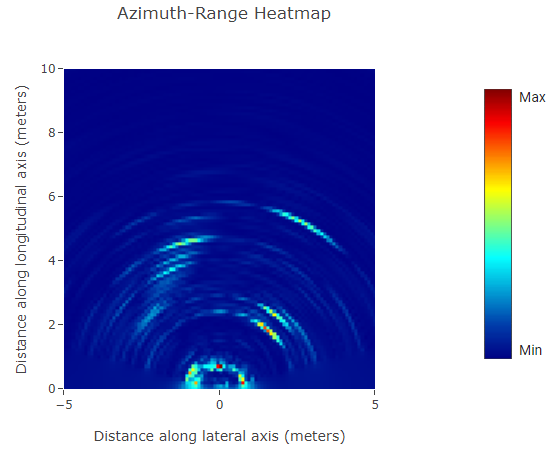
距离方位热图
该图用于可视化目标在不同方位和距离下的信号强度,横坐标表示沿横轴的距离,单位是 m,纵坐标表示沿纵向轴的距离,单位是 m,颜色映射和上图一致。
坐标参数及数据保存
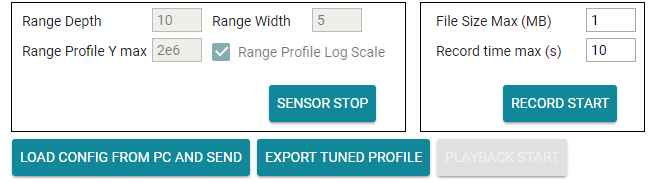
Plots右边的选项也是有很重要的作用的,可以通过点击sensor stop来设置我们想要的参数。
Range Depth(范围深度):测量的最大深度,单位为 m
Range Width(范围宽度):测量的最大宽度,单位为 m,传感器将在此宽度和深度范围内进行测量
Range Profile Y max(范围剖面的Y轴最大值):表示范围剖面Y轴的最大值
Range Profile Log Scale(范围剖面对数尺度):如果勾选此选项,Y轴将采用对数尺度显示,如果不勾选,就像下图:
RECORD START:这是TI官方提供的数据记录功能,文件的大小配置和时间配置一旦满足就会停止记录。
LOAD CONFIG FROM PC AND SEND:用于从计算机中加载传感器配置,并将其发送到传感器。
EXPORT TUNED PROFILE:导出当前的配置文件。
Profiling
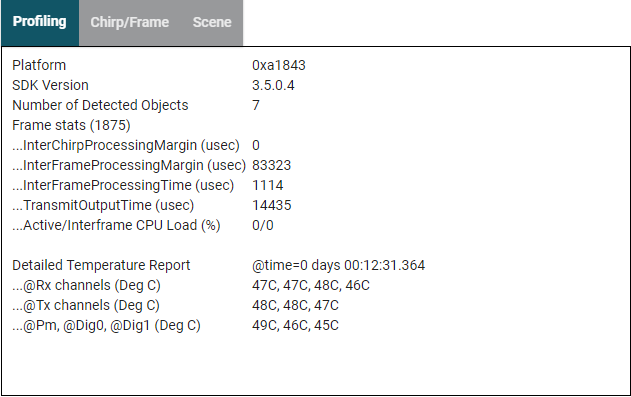
在Profiling参数中,有如下信息:
Platform:显示所用雷达型号;
SDK Version:显示所使用的软件开发工具包的版本号;
Number of Detected Objects:表示当前检测到的目标数量;
Frame stats(包含当前帧处理性能的详细信息,在传统帧配置的情况下,只有一个帧结构):
- InterChirpProcessingMargin(干扰脉冲处理余量):显示在线性调频脉冲处理后给定(线性调频脉冲+线性调频脉冲间)持续时间内剩余的时间,单位为微秒;
- InterFrameProcessingMargin(干扰帧处理余量):显示所有帧/子帧处理完成后在给定帧/子帧中剩余的时间,单位为微秒;
- InterFrameProcessingTime:显示在有源线性调频脉冲完成后用于帧/子帧处理的时间,单位为微秒;
- TransmitOutputTime:显示所请求的输出通过UART从毫米波器件发送到PC的时间,单位为微秒;
- Active/Interframe CPU load(%):显示帧/子帧和帧间/子帧间时间内有源线性调频脉冲期间CPU负载的百分比,这些值也反映在帧的CPU负载图上。
Detailed Temperature Report:显示来自各种温度传感器的器件温度报告,显示的时间是器件上电后的天数/小时数/分钟数/秒数/毫秒数。
Chirp/Frame
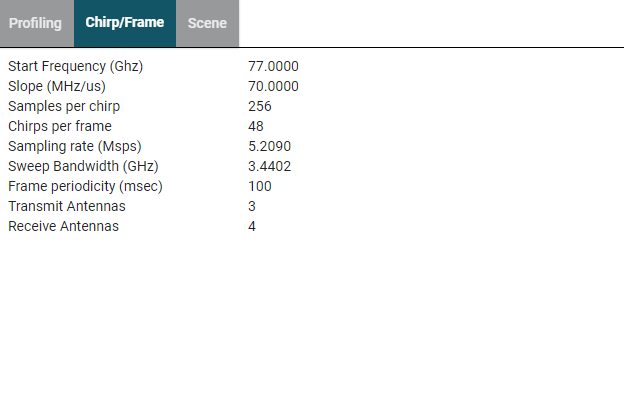
帧参数:
Start Frequency(GHz):表示发射信号的初始频率;
Slope(MHz/us):斜率,表示频率在每微秒内的变化量;
Samples per Chirp:表示每个发射脉冲(chirp)中采集的回波样本数量,这会直接影响数据分辨率和信号处理能力;
Chirps per Frame:每帧的Chirp数量,表示在每个帧内发射的Chirp的数量,Chirp越多,就能够更好的捕捉动态目标;
Sampling rate(Msps):采样率,代表每秒采集的数据样本数,单位为百万次每秒;
Sweep Bandwidth(GHz):扫频带宽,表示信号频率的跨度,直接关系到距离分辨率;
Frame periodicity(msec):帧周期,表示每帧之间的时间间隔,单位为毫秒;
Transmit Antennas:发射天线数量;
Receive Antennas:接收天线的数量。
Scene
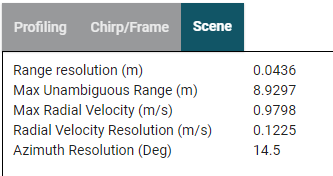
场景参数:
Range Resolution(m):距离分辨率,表示传感器能够区分两个目标之间的最小距离;
Max Unambiguous Range(m):最大不模糊距离,表示雷达系统在不产生混淆的情况下,能够检测到的最大距离,超过此范围,可能会出现距离模糊或多次回波的情况。这个值和前面我们设定的值大致相同;
Max Radial Velocity(m/s):最大径向速度,表示雷达能够测量的目标最大径向速度;
Radial Velocity Resolution(m/s):径向速度分辨率,表示传感器能够区分两个目标之间的最小径向速度。径向速度分辨率越低,雷达对速度变化的敏感度就越高;
Azimuth Resolution(Deg):方位分辨率,表示传感器在水平方向上能够区分的最小角度。
Real-Time Tuning
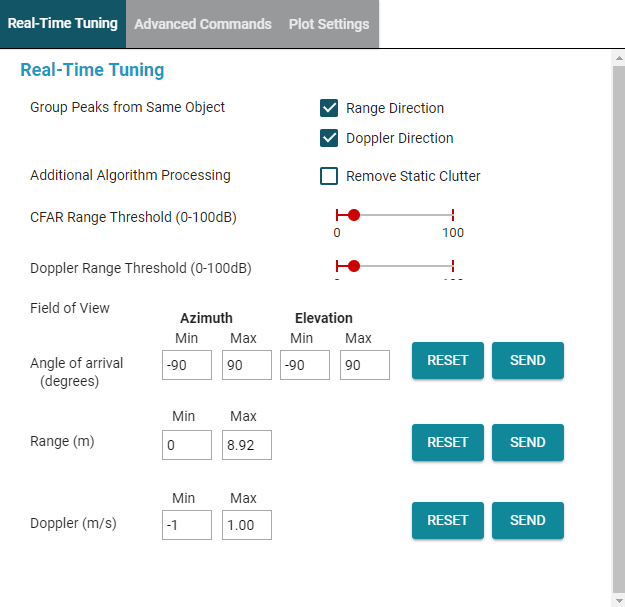
实时调优:
Group Peaks from Same Object(为来自同一物体的峰值分组):选中可以将来自同一物体的多个反射信号合并为一个目标,简化检测结果。
- Range Direction:范围方向
- Doppler Direction:多普勒方向
Remove Static Clutter(取出静态杂波):勾选后,传感器将尝试取出静止物体产生的杂波,可以用于检测动态目标;
CFAR Range Threshold(CFAR范围阈值):这里可以设定自主对比增益(CFAR)处理的范围阈值;
Doppler Range Threshold(多普勒范围阈值):设定多普勒处理的阈值,确保干扰信号不会影响目标速度的测量l;
Field of View:
- Azimuth:设置可检测物体的水平角度范围
- Elevation:设置可检测物体的垂直角度范围
- Range:设置可以检测的物体的距离范围
- Doppler:设置目标可能得速度范围
Plot Settings
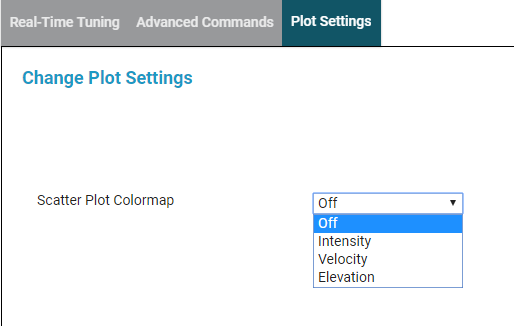
绘图设置:
off:不适用颜色变化;
Intensity:通过颜色反映信号的强度,数据点的颜色会根据返回信号的强度而变化;
Velocity:用于标识目标的速度,数据点的颜色将根据目标的径向速度变化;
Elevation:通过颜色映射目标的仰角,使用不同的颜色来表示不同的仰角值。
以上内容若有错误,欢迎大家指正

















 4904
4904

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









