



本文为转载:原文链接如下:
自动驾驶规划算法基础第三节-frenet与笛卡尔cartesian坐标系的转换_frenet坐标系与笛卡尔坐标系的转化-优快云博客
以下为转载内容:
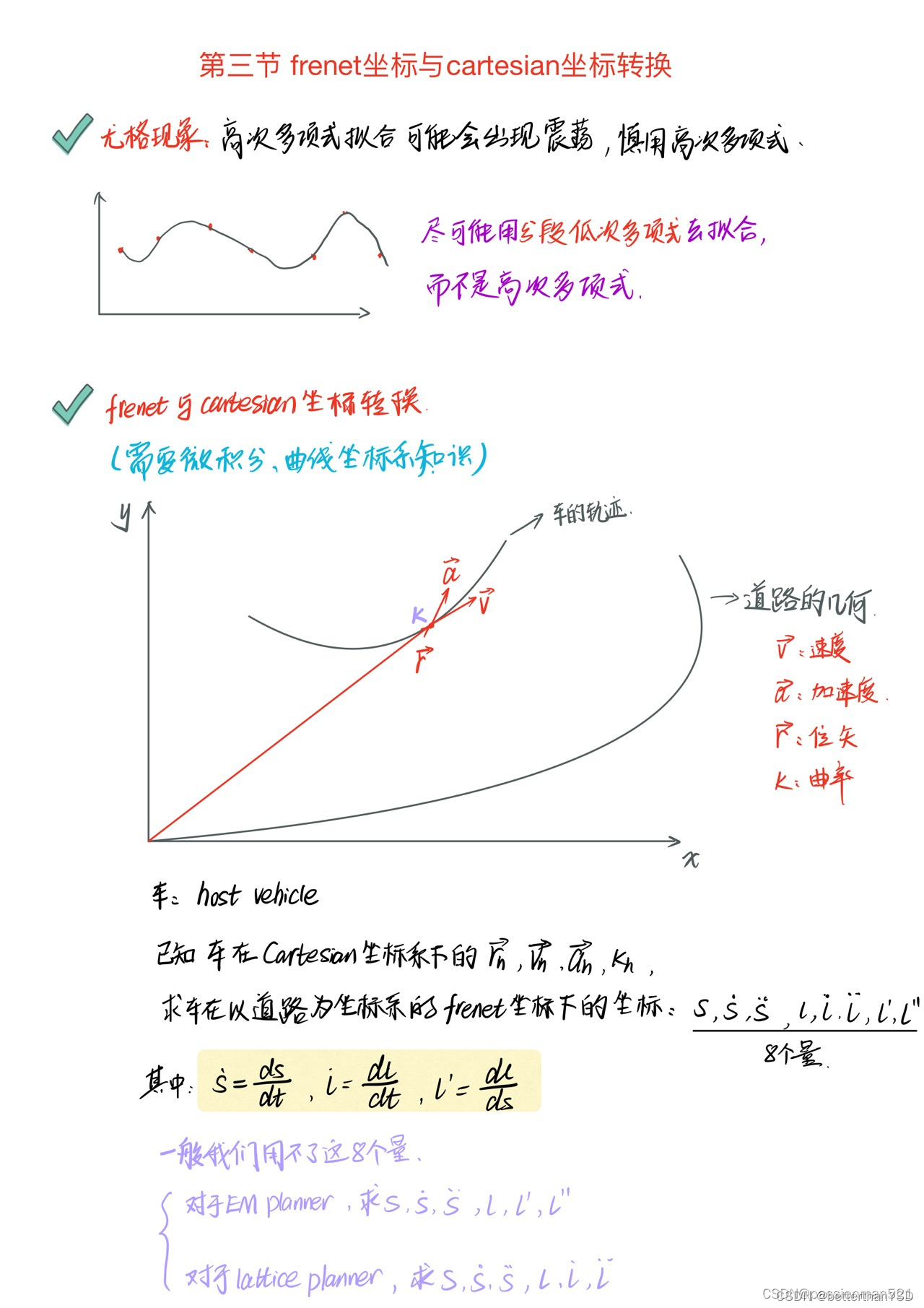
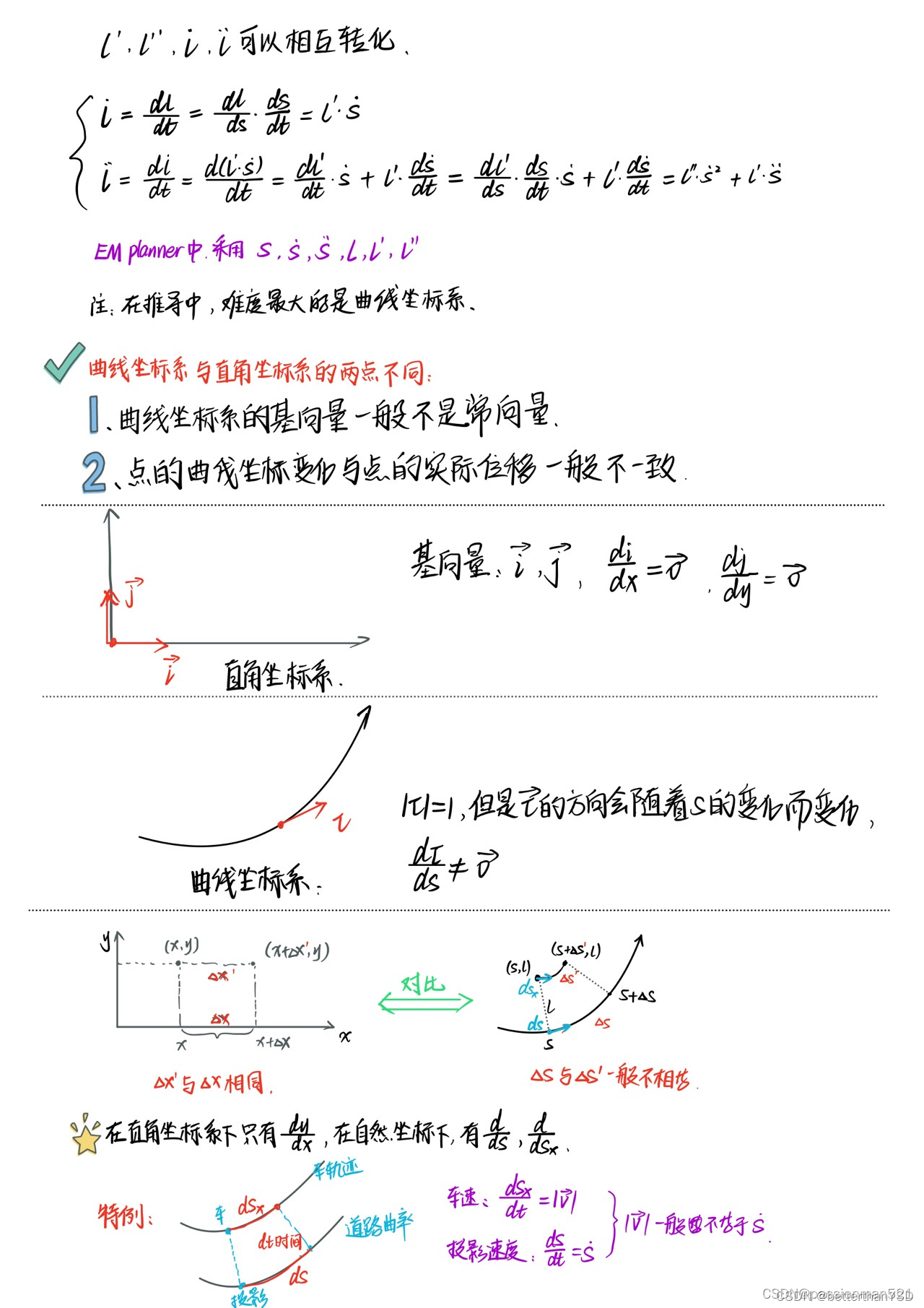
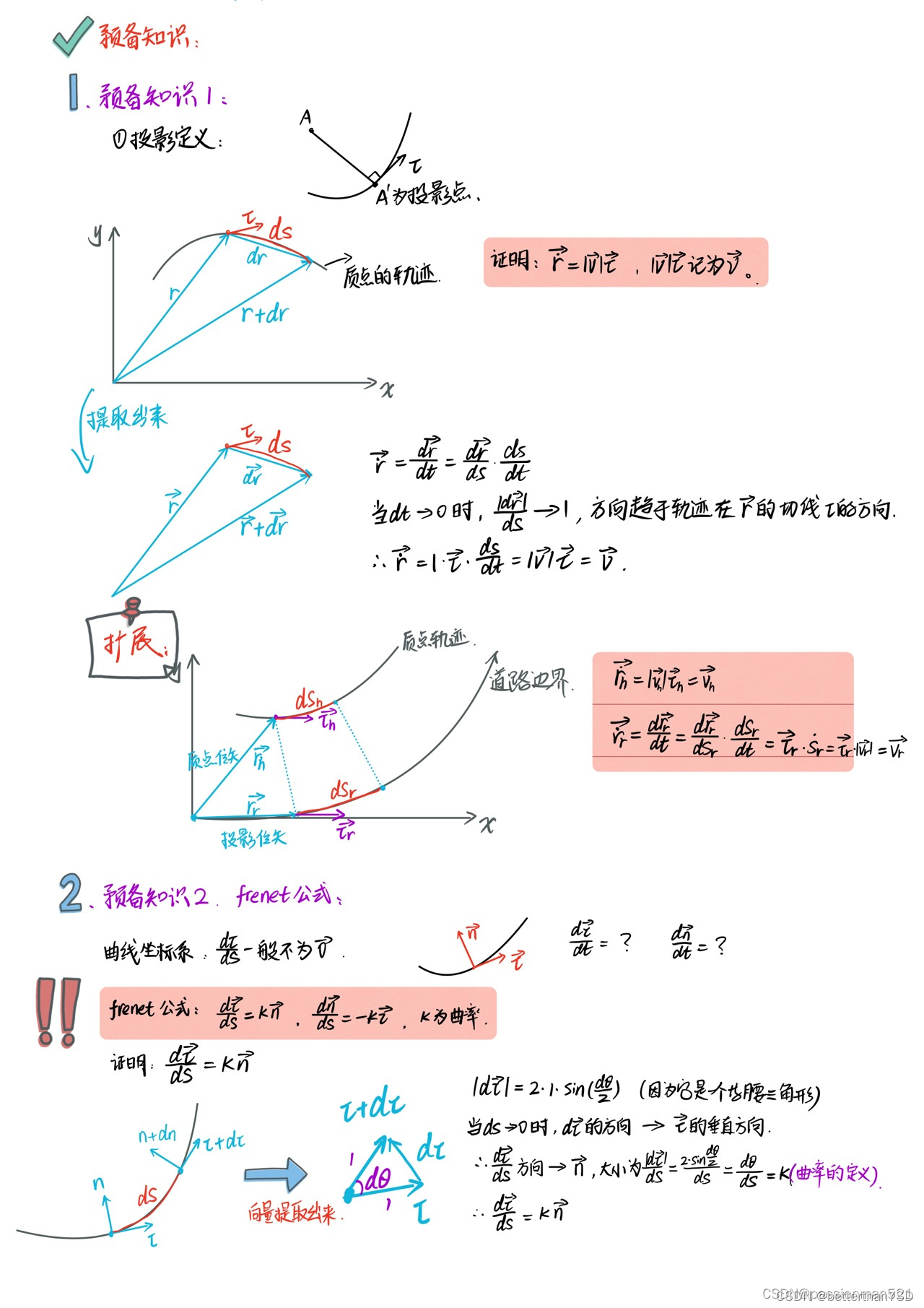
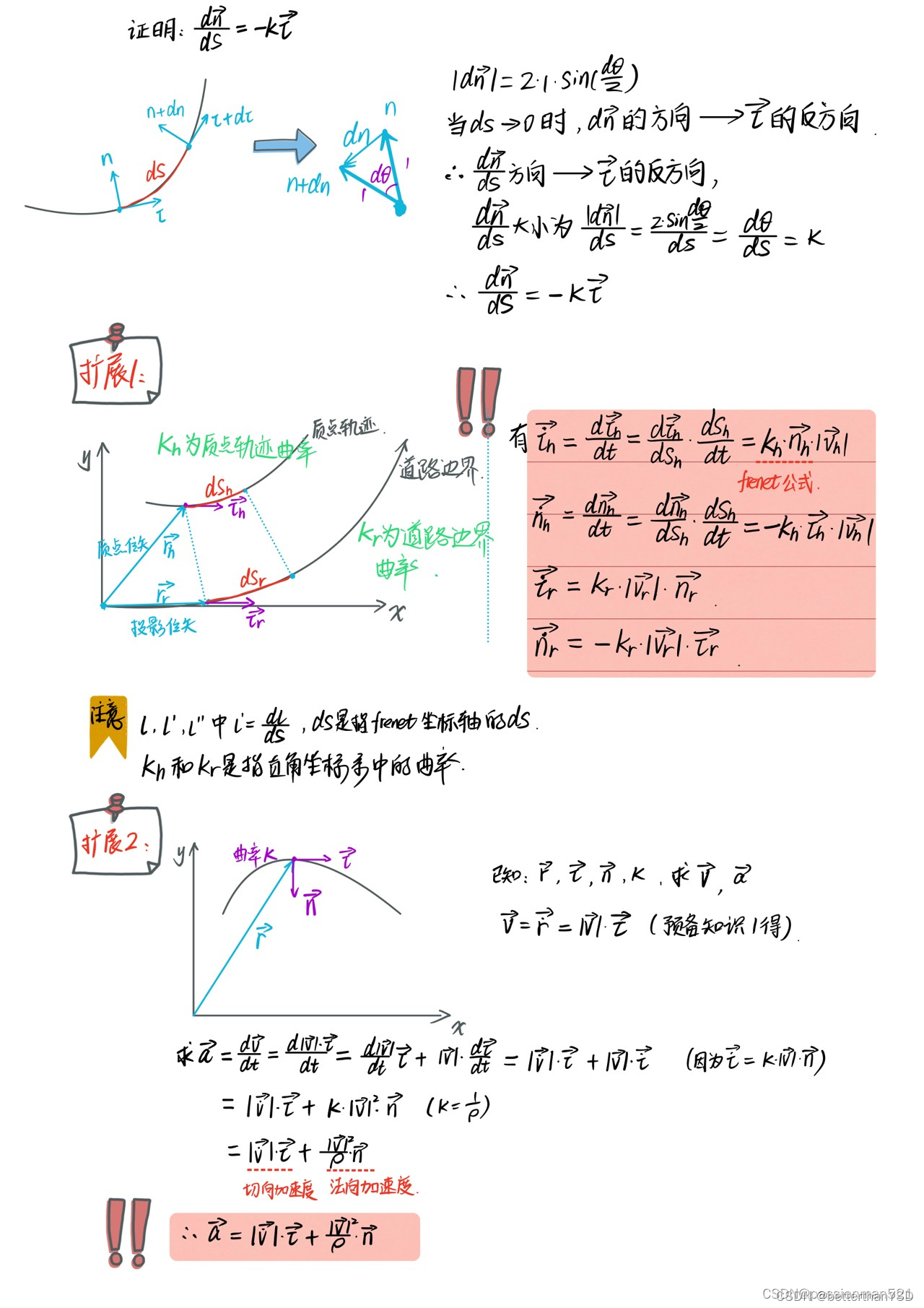
该笔记来自b站up主(偶像):憨厚老实的老王B站视频链接
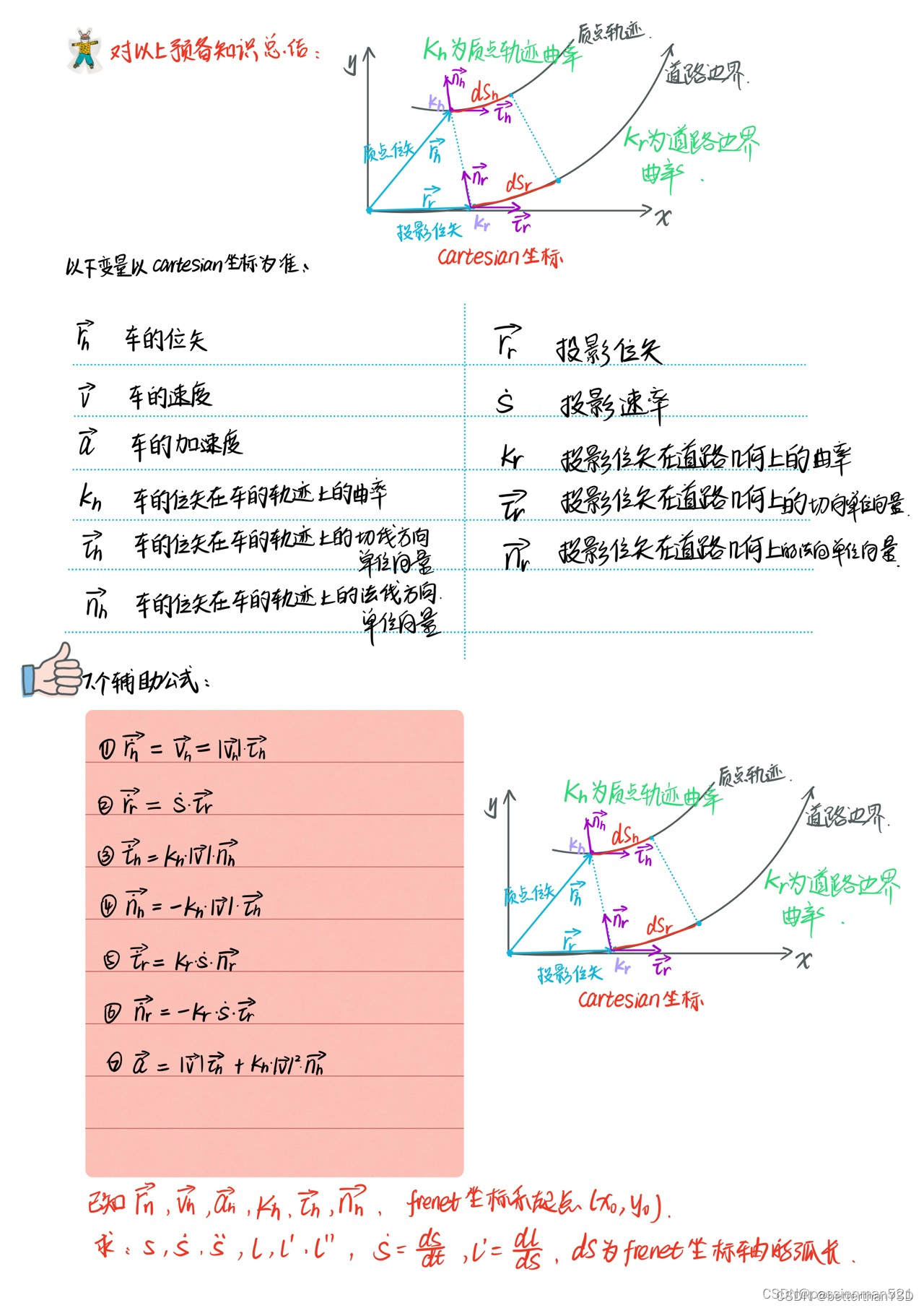
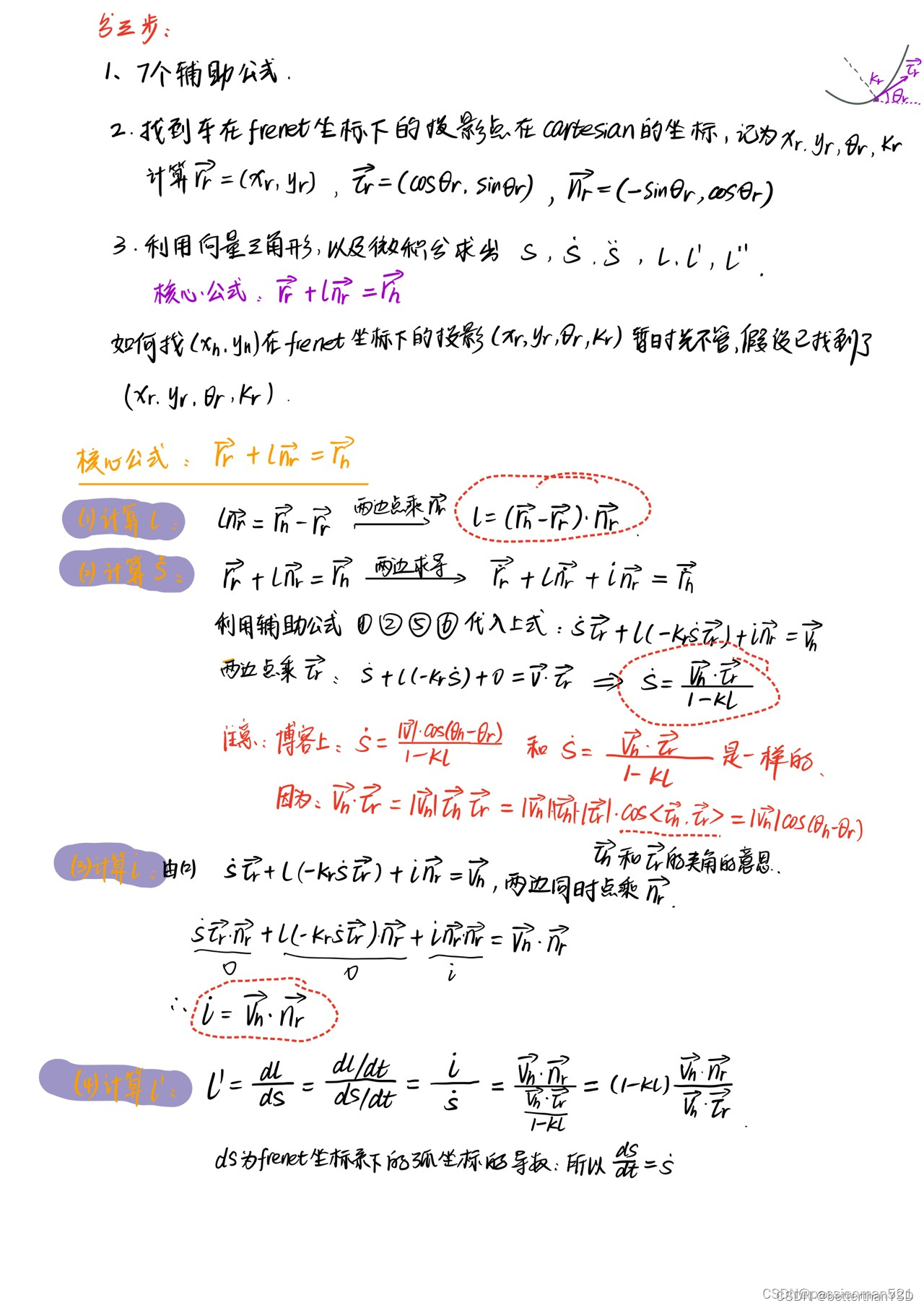
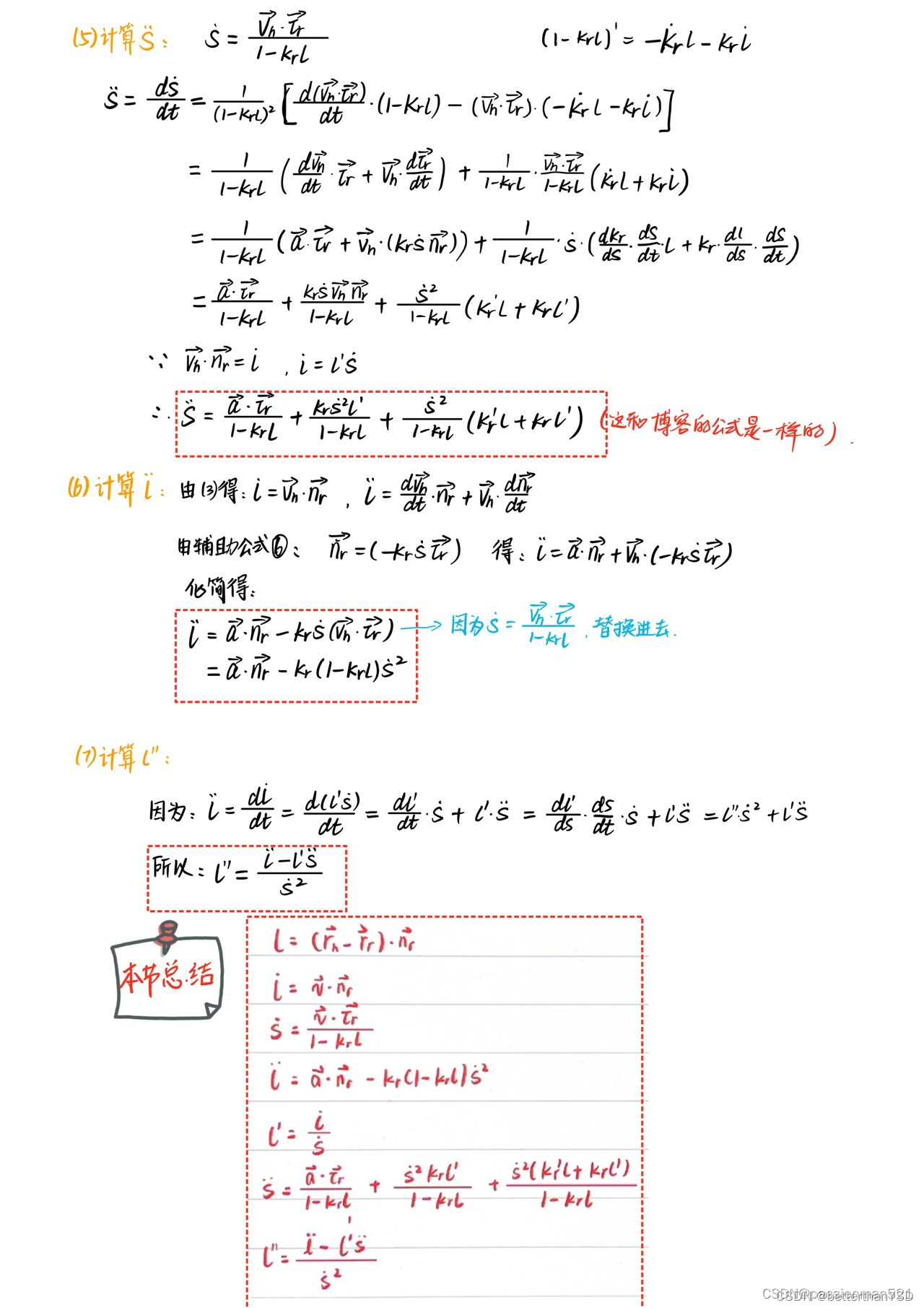
跟着老王的视频手写推了一遍公式,这酸爽!
csdn中推导公式比较好的博主:Frenet坐标系与Cartesian坐标系互转
转载内容结束:
感谢原作者的笔记,非常的清晰明了
再次注明原文链接如下:
自动驾驶规划算法基础第三节-frenet与笛卡尔cartesian坐标系的转换_frenet坐标系与笛卡尔坐标系的转化-优快云博客

















 1993
1993

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









