




 本文深入探讨了VINS-mono位姿图重用功能的测试,包括在不同地图重合度下的位姿估计效果。通过加载先前保存的位姿图,分析了地图与轨迹重合度对位姿估计的影响。此外,还介绍了FAST_RELOCALIZATION选项如何提高位姿估计的实时性和精度。
本文深入探讨了VINS-mono位姿图重用功能的测试,包括在不同地图重合度下的位姿估计效果。通过加载先前保存的位姿图,分析了地图与轨迹重合度对位姿估计的影响。此外,还介绍了FAST_RELOCALIZATION选项如何提高位姿估计的实时性和精度。
VINS-mono 位姿图 重利用测试
2018年03月20日 15:43:49 Watkinstord 阅读数:938
在前一篇博文里介绍了VINS-mono pose_graph reuse功能的使用,这里接着贴出一些延伸的测试,并进行一些探讨。
延伸测试
一般来说,加载地图是进行非GPS定位必要的一步。这里根据新的VINS公开的代码,以EuRoC的MH_01_为例,贴上rviz的效果图。在不加载地图的情况下,使能回环检测,得到无地图情况下的位姿估计如下图。图中绿色为估计的位姿图路径,红色的为真值。
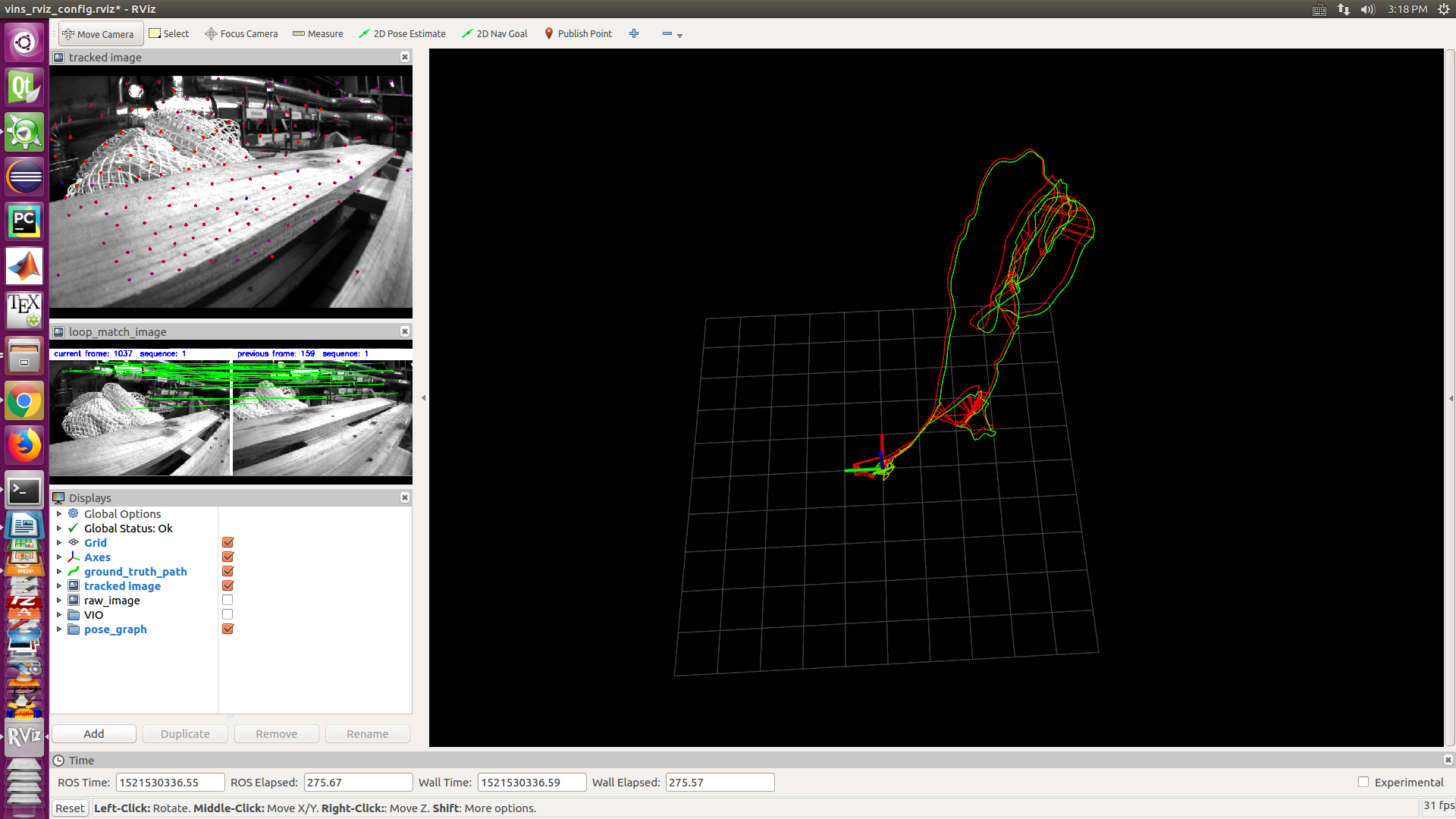
加载上一次的存储好的MH_01轨迹的位姿图,这个图是需要定位的路径重合度很高的地图。图中黄色的为加载的上一次得到的位姿图路径,存储在pose_graph.txt中。绿色的本次估计得到的位姿图路径,红色的为真值。
当加载与当前路径重合度不高的地图时,其位姿图估计效果如下图所示。其中黄色轨迹为加载的之前存储的MH_03_Medium.bag轨迹的位姿图。绿色的当前MH_01_easy路径的位姿估计轨迹,红色的为MH_01_easy序列对应的轨迹真值。
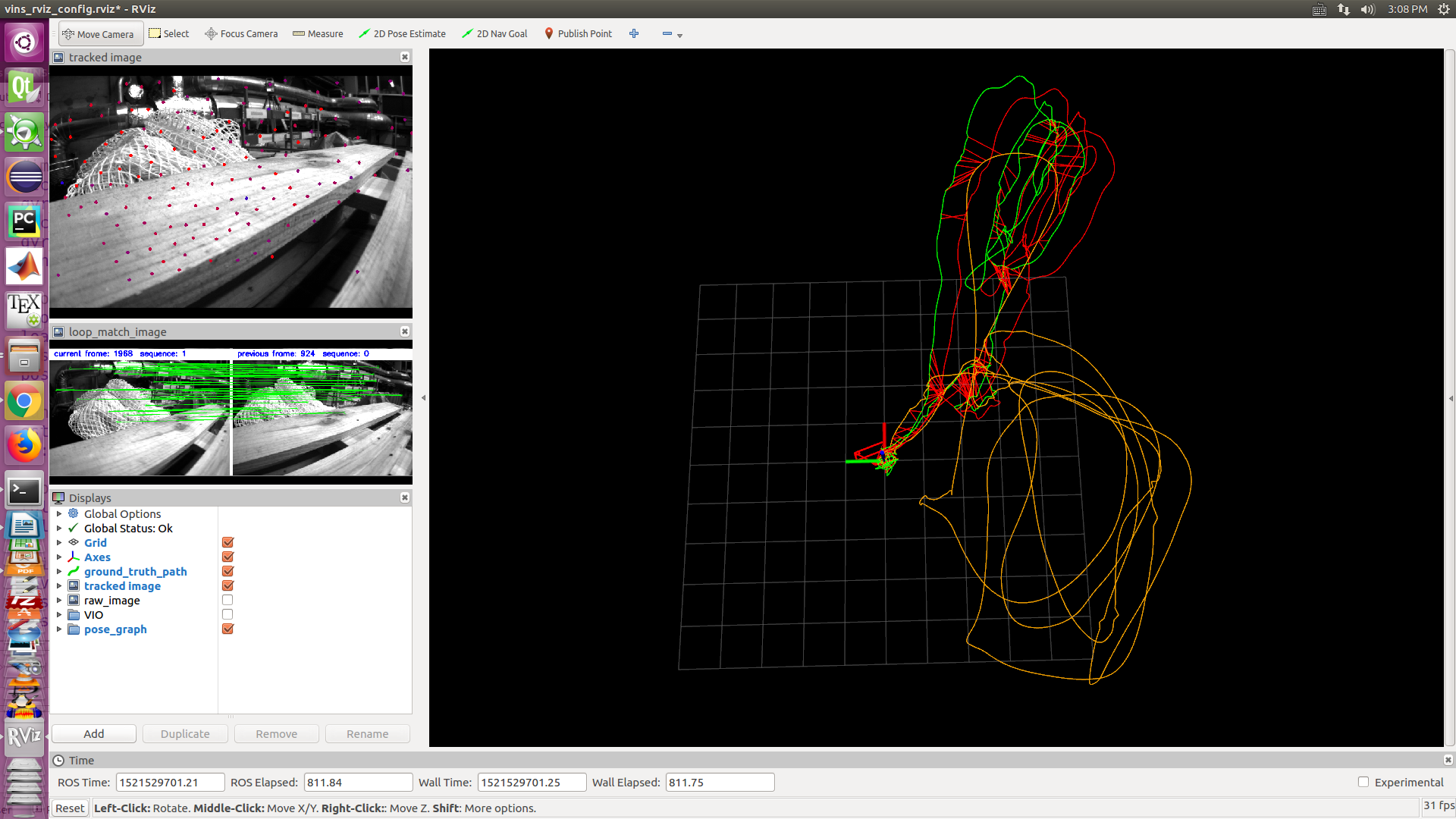
可以看出在地图与轨迹重合度不高的情况下,有可能会使估计的位姿轨迹变差。产生的原因,应该还是在部分轨迹区间出现了错误的回环估计,将位姿估计轨迹误差拉大了。
加载地图的代码
将关键点及对应的Brief描述子添加到DBow2的数据库中‘db’,帮助回环检测及重定位。
-
if (LOAD_PREVIOUS_POSE_GRAPH) -
{ -
printf("load pose graph\n"); -
m_process.lock(); -
posegraph.loadPoseGraph(); -
m_process.unlock(); -
printf("load pose graph finish\n"); -
load_flag = 1; -
}
-
void PoseGraph::addKeyFrameIntoVoc(KeyFrame* keyframe) -
{ -
// put image into image_pool; for visualization -
cv::Mat compressed_image; -
if (DEBUG_IMAGE) -
{ -
int feature_num = keyframe->keypoints.size(); -
cv::resize(keyframe->image, compressed_image, cv::Size(376, 240)); -
putText(compressed_image, "feature_num:" + to_string(feature_num), cv::Point2f(10, 10), CV_FONT_HERSHEY_SIMPLEX, 0.4, cv::Scalar(255)); -
image_pool[keyframe->index] = compressed_image; -
} -
db.add(keyframe->brief_descriptors); -
}
这里地图帧应该都被作为关键帧使用。
快速重定位选项
配置文件中说为了实现更好的实时和在大项目中的性能,增加 FAST_RELOCALIZATION 选项,相关代码
-
if(FAST_RELOCALIZATION) -
{ -
sensor_msgs::PointCloud msg_match_points; -
msg_match_points.header.stamp = ros::Time(time_stamp); -
for (int i = 0; i < (int)matched_2d_old_norm.size(); i++) -
{ -
geometry_msgs::Point32 p; -
p.x = matched_2d_old_norm[i].x; -
p.y = matched_2d_old_norm[i].y; -
p.z = matched_id[i]; -
msg_match_points.points.push_back(p); -
} -
Eigen::Vector3d T = old_kf->T_w_i; -
Eigen::Matrix3d R = old_kf->R_w_i; -
Quaterniond Q(R); -
sensor_msgs::ChannelFloat32 t_q_index; -
t_q_index.values.push_back(T.x()); -
t_q_index.values.push_back(T.y()); -
t_q_index.values.push_back(T.z()); -
t_q_index.values.push_back(Q.w()); -
t_q_index.values.push_back(Q.x()); -
t_q_index.values.push_back(Q.y()); -
t_q_index.values.push_back(Q.z()); -
t_q_index.values.push_back(index); -
msg_match_points.channels.push_back(t_q_index); -
pub_match_points.publish(msg_match_points); -
}
-
if (FAST_RELOCALIZATION) -
{ -
KeyFrame* old_kf = getKeyFrame(kf->loop_index); -
Vector3d w_P_old, w_P_cur, vio_P_cur; -
Matrix3d w_R_old, w_R_cur, vio_R_cur; -
old_kf->getPose(w_P_old, w_R_old); -
kf->getVioPose(vio_P_cur, vio_R_cur); -
Vector3d relative_t; -
Quaterniond relative_q; -
relative_t = kf->getLoopRelativeT(); -
relative_q = (kf->getLoopRelativeQ()).toRotationMatrix(); -
w_P_cur = w_R_old * relative_t + w_P_old; -
w_R_cur = w_R_old * relative_q; -
double shift_yaw; -
Matrix3d shift_r; -
Vector3d shift_t; -
shift_yaw = Utility::R2ypr(w_R_cur).x() - Utility::R2ypr(vio_R_cur).x(); -
shift_r = Utility::ypr2R(Vector3d(shift_yaw, 0, 0)); -
shift_t = w_P_cur - w_R_cur * vio_R_cur.transpose() * vio_P_cur; -
m_drift.lock(); -
yaw_drift = shift_yaw; -
r_drift = shift_r; -
t_drift = shift_t; -
m_drift.unlock(); -
}
测试图像


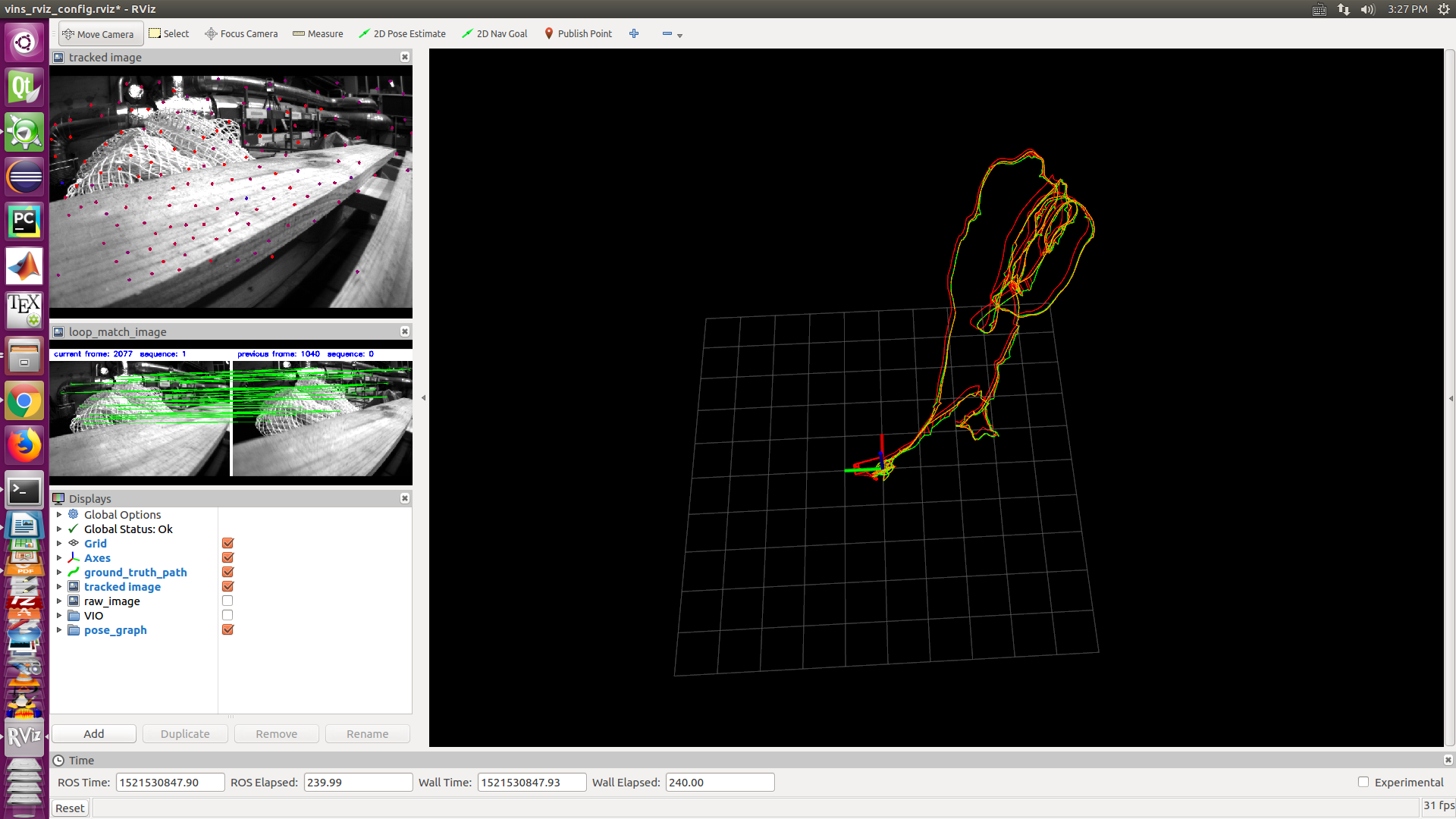
FAST_RELOCALIZATION 快速重定位选项在加载地图选项之后,也在回环检测配置这组里,可见与加载地图的重定位相关。在使能这一选项之后,位姿估计从RVIZ上看与地图重合度更高了,且更加平滑。

















 2143
2143

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









