



首先是通用算法:
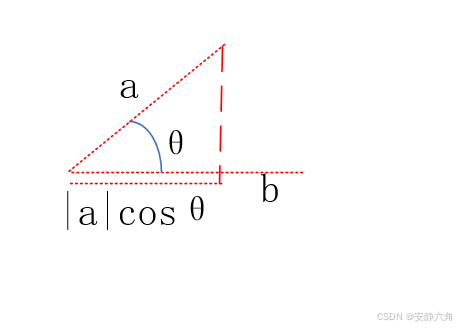
点乘的公式是:,示例如图所示:
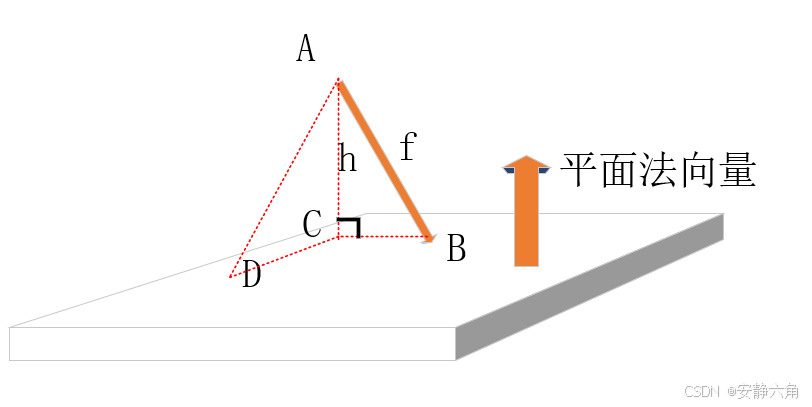
首先已知平面上的法向量,点A和平面上任意点D,求B,由于A已知求B转化为求f。
由点乘公式可知:
AD与平面法向量点乘=AB与平面法向量点乘
又:
AB与法向量点乘 = AB归一化向量*f点乘平面法向量;
ab 为AB归一化向量;
公式为:
则b点坐标为 A+f*ab
Unity 的方式为:
Ray部分代码:Origin为射线起点,Direction为归一化方向
public struct Ray : IFormattable
{
private Vector3 m_Origin;
private Vector3 m_Direction;
public Ray(Vector3 origin, Vector3 direction)
{
this.m_Origin = origin;
this.m_Direction = direction.normalized;
}
}
平面表示代码的关键点是:Normal 表示平面归一化法线,Distance表示距离原点距离
public struct Plane : IFormattable
{
internal const int size = 16;
private Vector3 m_Normal;
private float m_Distance;
public bool Raycast(Ray ray, out float enter)
{
float a = Vector3.Dot(ray.direction, this.m_Normal);
float num = -Vector3.Dot(ray.origin, this.m_Normal) - this.m_Distance;
if (Mathf.Approximately(a, 0.0f))
{
enter = 0.0f;
return false;
}
enter = num / a;
return (double) enter > 0.0;
}
}
两者综上:,a,b模相乘为1
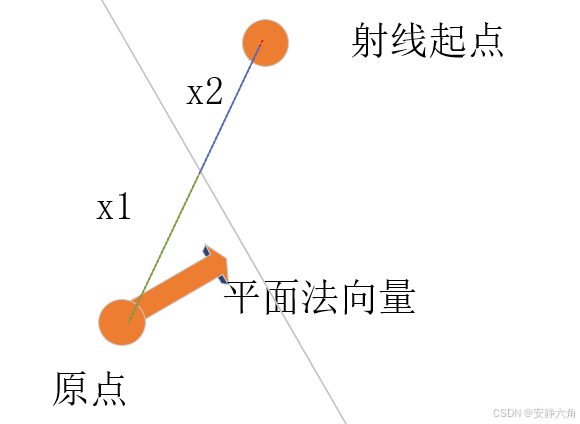
图中射线方向为原点方向
a=平面法线和射线夹脚余弦值
num = -射线的模*平面法线和射线夹脚余弦值-平面距离原点距离
则num/a = x1+x2 -x1 = x2
最终由射线起点+x2可求得交点。
RectTransformUtility中求交代码为:
public Vector3 GetPoint(float distance) => this.m_Origin + this.m_Direction * distance;
public static bool ScreenPointToWorldPointInRectangle(
RectTransform rect,
Vector2 screenPoint,
Camera cam,
out Vector3 worldPoint)
{
worldPoint = (Vector3) Vector2.zero;
Ray ray = RectTransformUtility.ScreenPointToRay(cam, screenPoint);
Plane plane = new Plane(rect.rotation * Vector3.back, rect.position);
float enter = 0.0f;
if ((double) Vector3.Dot(Vector3.Normalize(rect.position - ray.origin), plane.normal) != 0.0 && !plane.Raycast(ray, out enter))
return false;
worldPoint = ray.GetPoint(enter);
return true;
}

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









