



软体机器人机械感知
露西亚·贝凯、基亚拉·卢卡罗蒂、马西莫·托塔罗和马吉德·塔加维
摘要
我们致力于研究利用柔性传感系统编码机械信息的方法,以尽可能自然地为未来的机器人提供外部感知和本体感知能力。最近,我们通过结合智能布局与弹性体和导电织物等软材料,在软体人工机械感知方面取得了一些进展。本文简要讨论了这些最先进的技术成果所应满足的一些基本要求。随后,我们报告了两项案例研究,分别对法向力和切向力以及弯曲和压痕刺激进行了区分。目的是为进一步的讨论和研究奠定基础,以推动软体机器人和可穿戴系统在实际应用中的发展。
1 引言
如今,机器人科学家正在尝试多种技术、材料和仿生策略,以构建软体机器人,这些机器人在不久的将来将能够在非结构化环境中“生存”[12, 13, 26];在此背景下,身体硬件发挥着与外部世界进行交互的关键作用[15]。特别是在这一宏大的愿景中,软体机器人应能够感知机械参数(诸多参数之一),并利用这种机械感知能力来适应或应对意外情况。因此,一方面,它们应在进行探索性运动以及抓取与操作未知物体时,感知来自外部的机械刺激(可能有多种类型,例如压力、来自不同方向的力、振动等);另一方面,它们应能重建自身在空间中的运动。传统机器人学采用大量方法使机器人具备外部感知和本体感知能力来应对这一场景,而软体机器人也必须解决这一问题。
能够贴合表面并将应力分散到更大体积的机器人。必须采用新的柔性/可变形策略,以实现传感与本体的完全集成,旨在通过低计算复杂度策略实现更多的感知功能。
1.1 软体外部感知与本体感知
在自然界中,外部机械信息通过触觉由天然皮肤及其下方的软组织进行编码和传递:机械刺激引起组织变形,从而实现触觉功能。除了被广泛研究的人类触觉[21]之外,动物与植物界中还存在许多其他生物实例。例如,头足类动物(如普通章鱼)对其身体表面各处的触觉都十分敏感。它们的腕足在软组织中嵌入了高密度的机械感受器(此外还有化学感受器),使动物能够适应性地与其环境互动[8]。植物也是具有高度敏感机制的生命体,能够感知并响应极其细微的机械刺激,例如触碰[3]。一些食肉植物拥有特定的机械感应结构(例如捕蝇草具有触发毛,圆叶茅膏菜则具有触觉敏感触手),可实现敏感且选择性的机械信号传递。即使是没有特化器官的植物,也能通过表皮细胞——即植物体最外层(即植物‘皮肤’)——在茎和根部感知并响应外界施加的机械刺激。这些细胞在受到机械应力时发生变形,并引发一系列内部生化信号级联反应[25]。
通过模仿自然触觉的内在特性以实现形态与功能上的仿生,并利用智能布局和/或新一代材料(即软活性材料[13],因其可发生大尺度且可逆的变形而具有柔软性,又因能够响应施加的刺激而具备活性)的智能特性,可以探索创新的人工触觉感知解决方案。这些材料兼具导电与非导电特性。特别是为了实现完整的功能集成,宜采用构成软体机器人本身的相同材料来制造组件,例如可拉伸铂催化硅酮(即聚二甲基硅氧烷(PDMS)或Ecoflex®)。
这些材料用于非导电部分,其杨氏模量范围与生物组分相当(即皮肤或肌肉组织的杨氏模量为10⁴–10⁹ Pa):PDMS的杨氏模量根据组分的固化温度和混合比例不同,可在360–3000 kPa范围内变化,而Ecoflex®系列的模量可达50 kPa [2]。在导电部分方面,多个研究团队正在研究多种材料用于人工触觉,包括:导电聚合物 [5, 19];液态金属 [4, 17];石墨烯 [10, 35];碳纳米管 [18, 31];智能织物与纤维 [7, 16, 32]等。此外,还发展了可拉伸表皮电子技术,通过结合传统与先进的硅基技术和软材料 [1] 实现。这些以及其他众多进展均十分显著,但通常这些设备要么被优化为分离的触觉组件(单个或传感器阵列),因为并未旨在直接集成到软体机器人中;或者它们无法同时检测更多的机械信号。事实上,在将软传感装置集成到由软材料制成的机器人中时,关于机械激励的解耦会出现一些主要问题。
其一是软传感器对不同的机械应力响应相似;其二是本体的形变会影响感知功能。
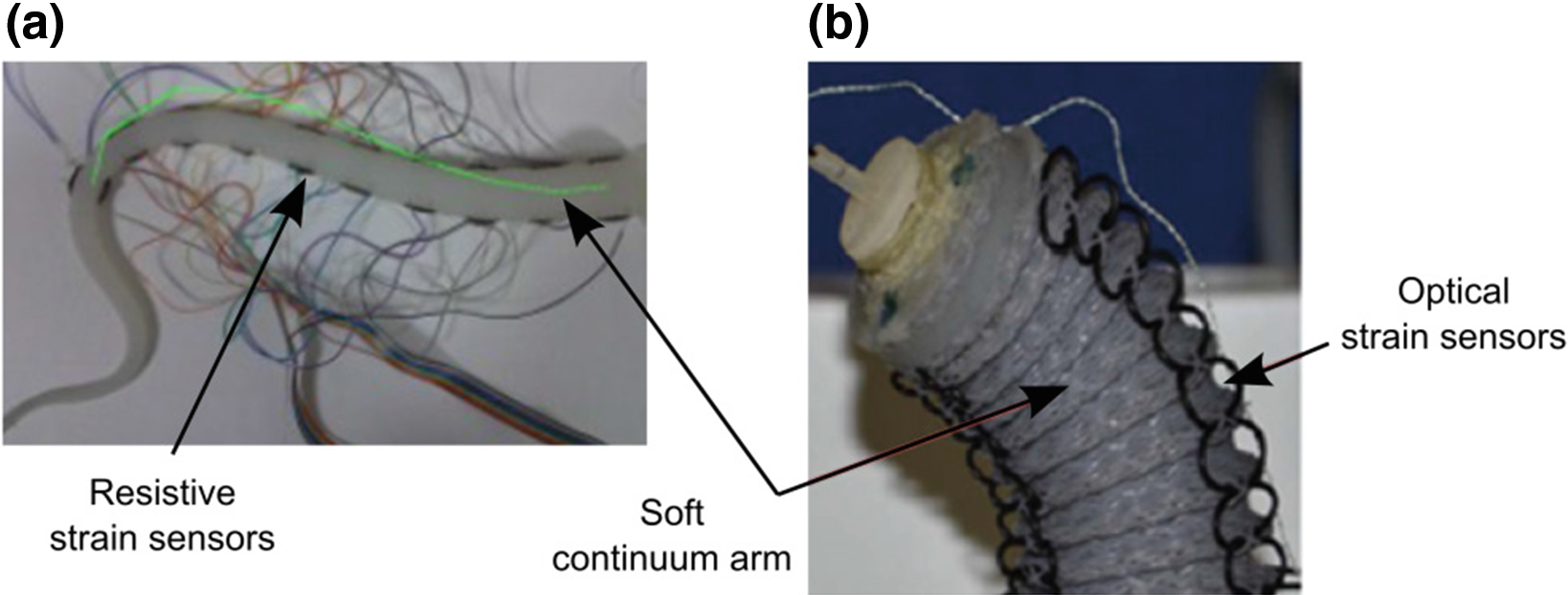
在本体感受编码的情况下,软体机器人领域已提出多项研究。章鱼启发式连续体臂采用基于导电织物的电阻应变传感器(如图1a所示)进行传感,以重构腕足的弯曲方向[6]或曲率[6]。基于PVDF的传感器被用于超柔性梁的形状追踪[28]。此外,还将导电纱线弯曲传感器集成到用于微创手术(MIS)的气动软体机器人中,以检测弯曲或伸长[33]。因此,这些研究虽然确实追求传感与机器人本体之间的紧密耦合,但主要集中在利用软体运动的单一传感功能(例如压力或应变)上。
最近,外部感知和本体感知能力通过两种完全不同的方法被嵌入到软体器件中。在一项研究中,三个宏弯曲应变传感器(基于高灵活的光纤)被缝制在一个由Ecoflex®硅胶制成的软连续体臂的外围(图1b),用于区分弯曲、伸长和压缩载荷。该臂自身的空间构型得以重建,但未涉及对更多机械参数(内部或外部施加)的同时检测。
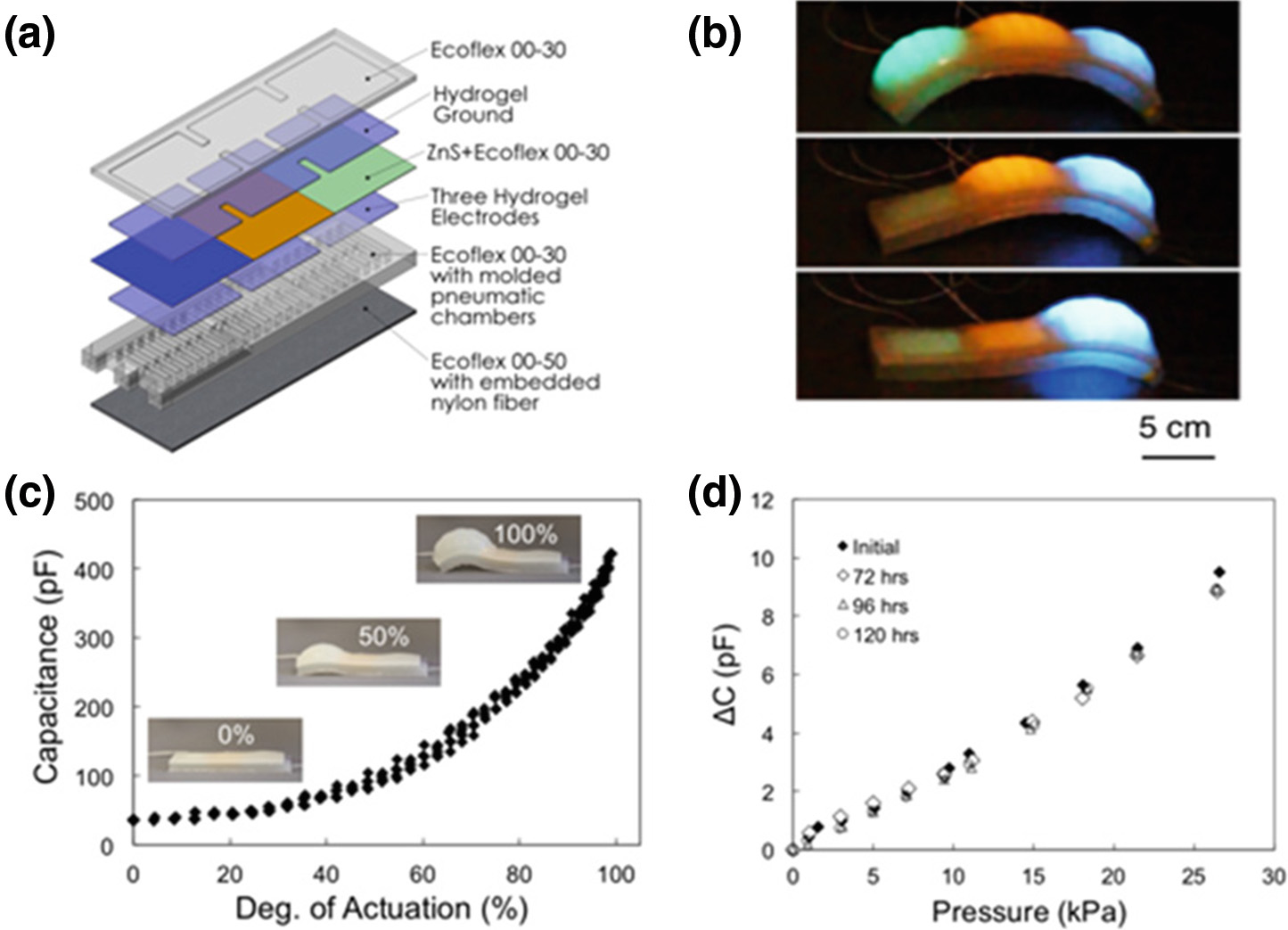
在另一项工作中,构建了一种高度可拉伸的软爬行机器人,用于感知外部压力和自身形变[14]。据我们所知,这项工作首次全面解决了将传感与机器人本体融合的关键问题,其传感和驱动系统采用完全机械耦合的材料制成:超弹性电致发光皮肤是
机器人本体本身的一部分。特别是,通过利用电容和电致发光元件,该机器人能够显示由于自身运动引起的皮肤拉伸或来自外部物体的压力(图2)。
这些研究预示了软体机器人机械感知领域的重要里程碑,未来的研究应朝着两个主要方向发展。首先,所采用的感知策略应能够区分不同的机械刺激(即具备多模态能力);其次,在制造和表征方面,传感与身体之间必须实现共生关系,以实现高水平的功能集成。接下来,我们将描述两种柔性感知方法的实例,这些方法通过使用不同的可 conformable 材料和低计算量感知策略,考虑了上述两个方向。
1.2 基于电容式电子织物的机械感知
软体机器人最有前景的材料之一是织物,而织物也是可穿戴系统的主要组成部分[29, 32]。事实上,织物具有良好的贴合性,可以通过选择合适的纤维进行拉伸,其机械特性范围广泛,不仅取决于所用材料,还取决于采用的编织策略。特别是能够感知和响应外部施加刺激的导电织物(即电子纺织品,etextiles),具有优异的电学和机械性能,为开发低成本、高效/稳健的传感技术在机器人技术和可穿戴设备领域 [23] 开辟了大量新前景。因此,利用这些材料构建智能机械传感结构的兴趣日益增长。下文描述了两个案例研究,其中通过结合柔性硅胶弹性体和具有不同弹性和拉伸性能的电子纺织品,在智能设计中实现电容式转导机制以提供智能化功能。
2 高灵敏度柔性三轴力传感器
人工触觉传感的主要任务之一是区分和检测法向力和切向力。为了测量切向力,已采用多种方法和不同的转换原理[9, 11, 34]。其中一种解决方案是通过在传感器表面构造特定结构(例如台面结构),以增强传感器内部的剪切变形,从而根据具体的转换机制引起电阻或电容变化。然而,这些方案更适用于刚性器件,以确保在各个方向上具有良好的灵敏度。事实上,当应用于柔性结构时,随着作用力增大,成形表面自身的变形将占主导地位,从而限制了传感器的工作范围。为了在较宽范围内实现高灵敏度,将具有合适机械和电气特性的弹性体结合到基于电容结构的三轴力传感器中[30]。
多层结构使传感器具有高顺应性、鲁棒性和极高灵敏度(最小可检测重量和位移分别小于10 mg和8 μm)以及宽检测范围(实测高达190 kPa,估计可达400 kPa)。图3所示的传感器由两层基于织物的电极层(即顶部和底部)构成,这两层为不可拉伸(但柔性)的铜/锡涂层织物,中间由一个浮动介电层隔开。该介电层是一种氟硅酮薄膜(道康宁730,70 μm厚),因其高介电常数和机械性能而具有吸引力。由于其低粘附特性,在制造过程中,两个铜/锡涂层织物电极之间自然形成约150 μm的空气间隙。该空气间隙增加了第二介电层,并在极低压力下(约0–2 kPa)触发高灵敏度。实际上,机织织物呈现出两组主要的正交导电纱线(即经纱和纬纱),其中经纱上下交错于纬纱之间,形成一个称为梭口的开口。因此,梭口所产生的空气体积有助于形成第三介电层,该层在较高压力下(>2 kPa)起着重要作用。这一独特的复合结构被嵌入在两个PDMS封装层之间,从而形成一种机械上柔性且鲁棒的电容式
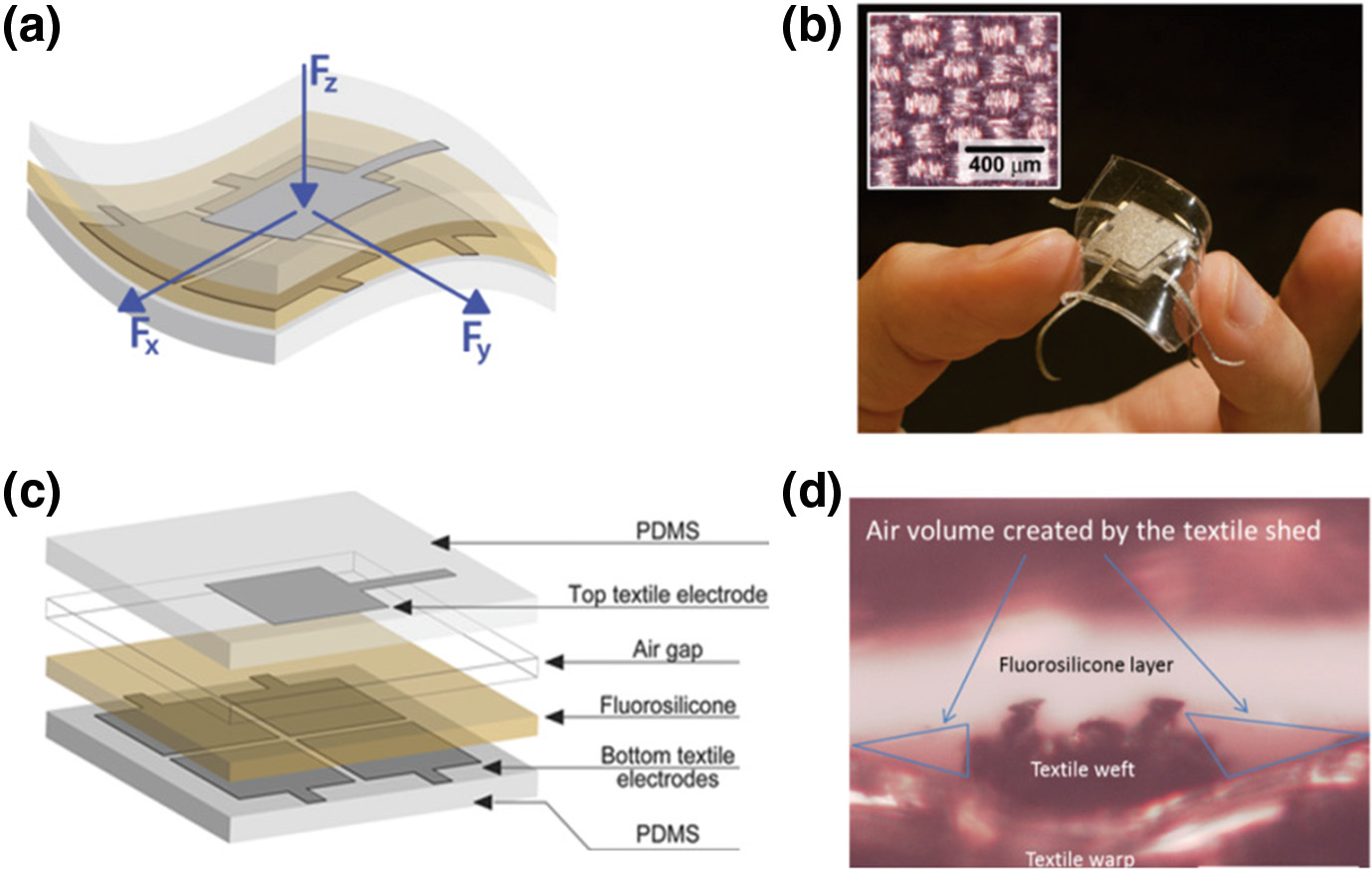
传感器。该设计包含四个方形底部电极,它们与一个更大的共用顶部电极构成四个单元电容器。顶部电极与底部电极之间的重叠区域是实现三个轴方向力检测的关键。特别是,剪切力检测的关键在于以特定方式组合材料,使得外部施加的切向力导致顶部电极相对于底层发生滑动。值得指出的是,在此系统中,采用差分读出策略至关重要,以最小化寄生电容并降低由邻近效应引起的噪声;这也使得传感器对电极位置错配更加鲁棒,从而实现更简单且低成本的制造。
3 软体中的弯曲与压力检测
如上所述,多模态——即转换所施加刺激不同参数的能力——是在软体机器人中实现机械感知时需要解决的主要问题之一,且应在不增加整体结构(包括机械和算法)复杂性的情况下解决。
植物界,特别是植物根系,是这一领域极佳的灵感来源[22]。植物学家[24]观察到,拟南芥根在弯曲时,其表皮细胞在凸面和凹面壁上分别发生拉伸和压缩。这使得植物能够通过可检测或不可检测的内部响应来编码弯曲运动。
事实上,从研究植物感知机械刺激的能力出发,即机械感知,在[20]一种能够区分其凸面和凹面以及弯曲或压痕刺激的柔性感知体中进行了探究。
采用弹性体和织物等柔性与可拉伸材料,构建了两个超弹性传感元件,它们紧密贴合于其所嵌入软体的简单形状,并随其变形而变形。值得注意的是,通过比较传感位置的响应,可同时获得关于弯曲(或最大挠度,取决于软体的力学构型)和作用力的信息。图4展示了由聚二甲基硅氧烷制成的圆柱形、柔性且柔软的本体结构,及其相对两侧(即相隔180°)嵌入的两个电容式传感元件。在此案例中,两个相同的传感元件由两根可拉伸电解纤维构成,并由一层作为介电材料的弹性体Ecoflex0010膜隔开。选用此类可拉伸织物作为电容器的电极,结合粘附于两个电极的柔软介电层,以及在软圆柱体内逐层制造的工艺,均为揭示弯曲运动所诱导应变的关键因素。
传感元件(即S1和S2)的电容变化与施加在软体上的不同机械刺激(如弯曲和/或外部力)相关,特别是分析了软体在二维平面上弯曲的多种机械构型。结果表明,对于
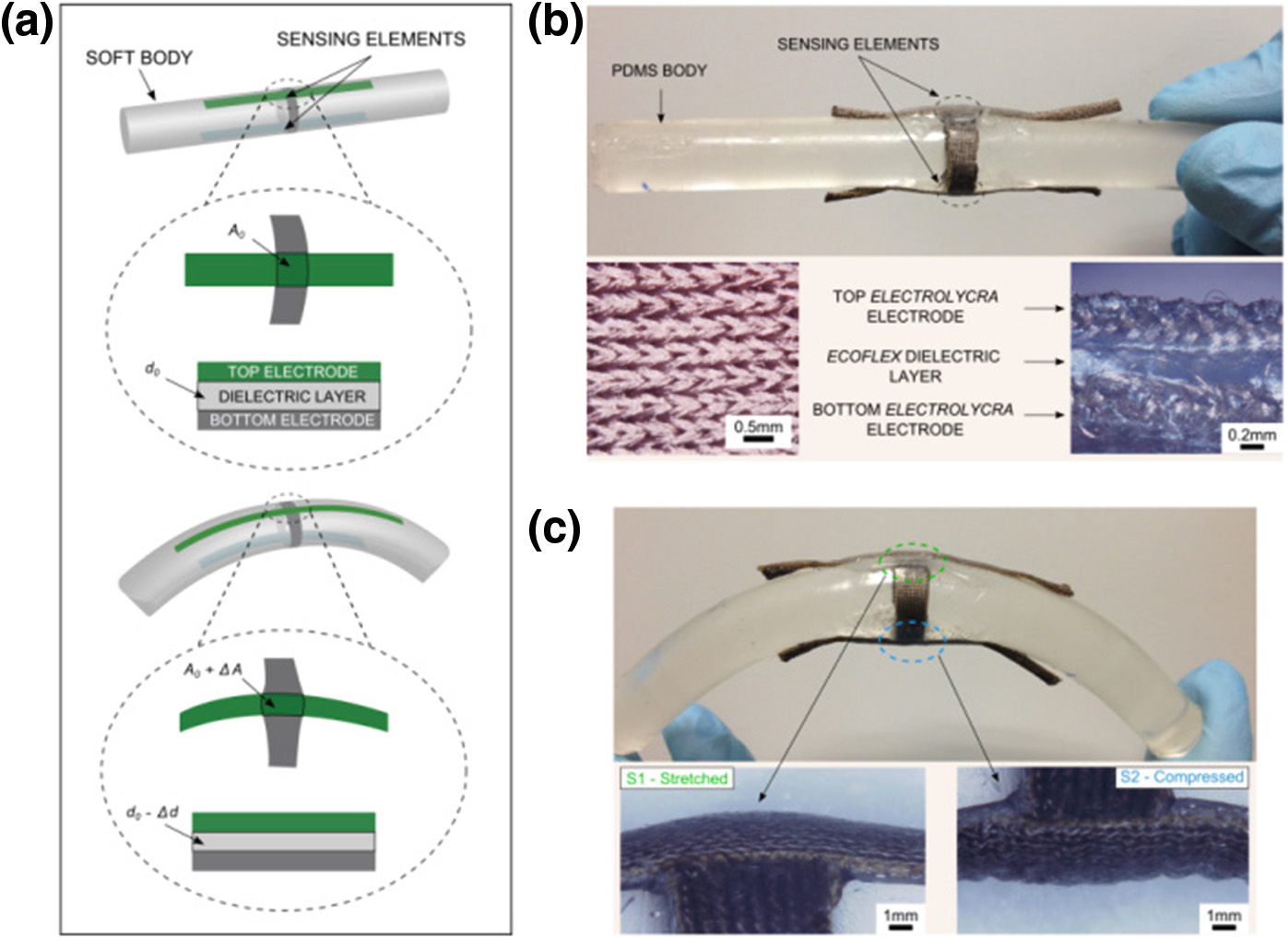
给定构型下,通过简单比较传感响应的幅值和符号,即可获取施加的激励。
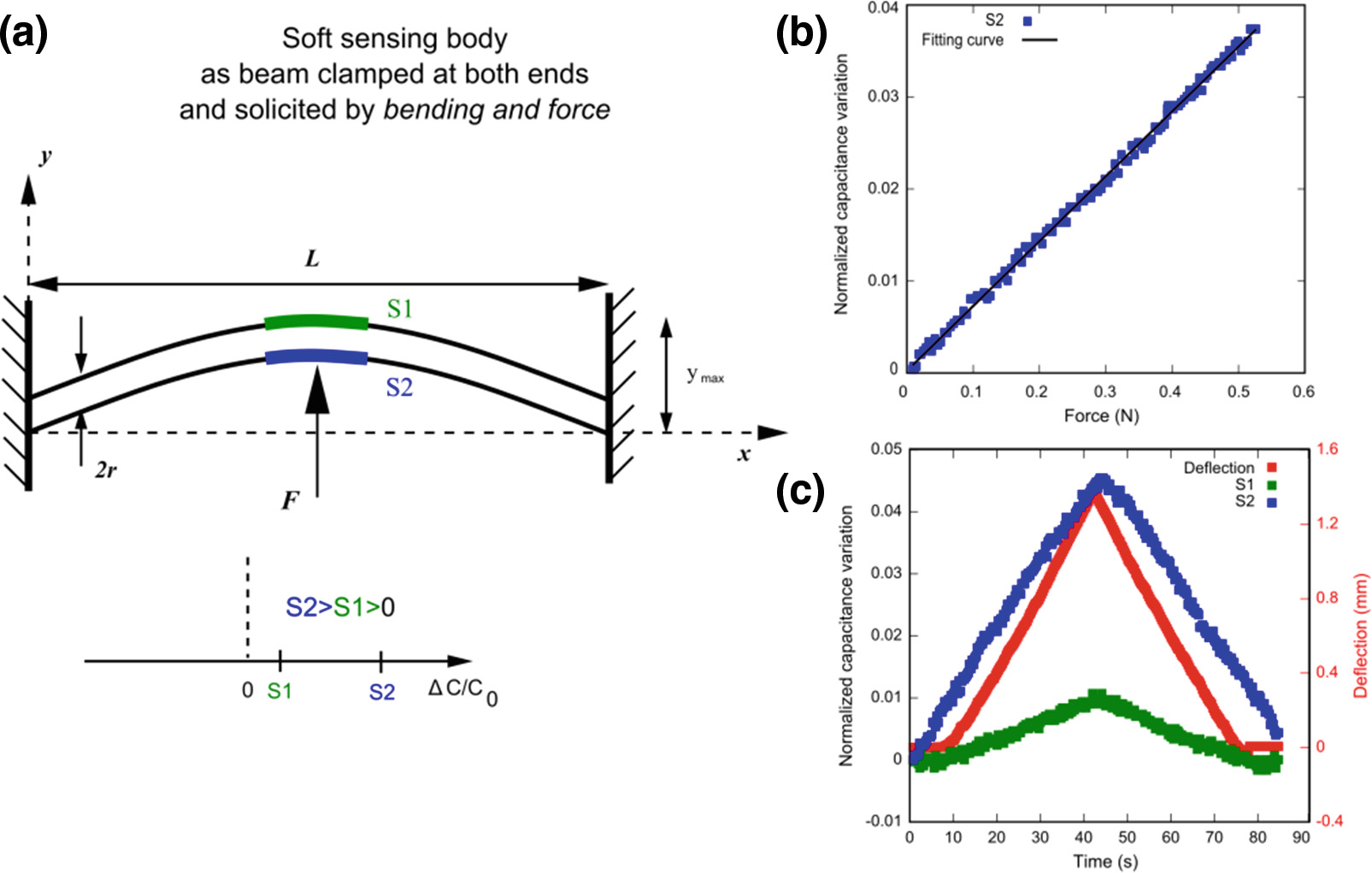
例如,在两端固定的梁上,当外部力施加于其中一个传感元件时(见图5),两个输出信号均呈现正响应,且可重构其挠度(见图5右下角的蓝色曲线)。然而,由于施加了压痕,凹侧信号的幅值远大于凸侧。相比之下,当仅发生弯曲时(构型未在此显示,请参见[20]),输出信号符号相反,且凹侧传感元件的幅值小于凸侧。
4 结论
尽管仍处于早期阶段,软体机器人领域目前的研究表明,一些基本且众所周知的原理如何借助新材料被成功地重新诠释。例如,尽管[20]所采用的弯曲检测技术通常在工程中用于检测轴弯曲(但使用其他传统技术手段,例如在金属轴上使用应变片),但作者们从中受到启发,借鉴了拉伸和压缩
利用植物细胞的机制在软模块中实现,这一方法引发了感知多模态方面的新成果。然而仍有一些开放性问题需要解决。特别是,应通过结合不同的转换原理与完全嵌入机器人本体的智能结构,来发展软体机器人中三维运动的重构技术。此外,还应研究软体传感体的其他替代形状或更复杂的形状(例如小角度锥形)。另一个例子是简单的电容原理,该原理(如同许多其他原理一样)不仅可从其电子特性角度考虑,还可结合由软材料构成的电容器的结构和机械行为进行思考。
如今,驱动软体器件中集成更多感知功能的潜力已得到证实[14]。然而,从上述研究出发,为了将基本概念扩展到真正的软体机器人场景,许多方面仍需关注。无论如何,在未来的研究中,应采用仿生方法,使软体本身成为机械感知系统的一部分,并且需要开发计算成本最低的模型和重构策略,以简化处理电子器件,实现可靠自主系统。

















 2689
2689

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









