



软体机器人:基于文献计量分析的学术洞察与展望
摘要
软体机器人技术在机器人领域以及公共媒体中日益受到关注,相关主题的出版物数量和质量均有所增加。为了系统地阐述这一发展趋势,我们基于科学引文索引扩展版数据库,采用文献计量分析方法对1990年至 2017年间该领域的出版物进行了评估。我们根据关键词、引用次数、h指数、年份、期刊、机构、国家、作者和综述文章等方面提供了详细的概述与讨论。结果表明,美国在该研究领域处于领先地位,中国和意大利紧随其后。哈佛大学的出版物数量最多,篇均引用次数较高,且拥有最高的h指数。在发表该领域相关文章的前20名学术期刊中,《IEEE机器人学汇刊》排名第一,而《Soft Robotics》在“机器人技术”类别期刊中位居首位。执行器、制造、控制、材料、感知、仿真、仿生学、刚度、建模、动力、运动和应用是软体机器人领域的热点主题。智能材料、仿生学、形态计算和具身控制预计将为该领域未来的发展做出重要贡献。应用和商业化似乎是软体机器人的初始驱动力和最终目标。
关键词 :软体机器人、人工肌肉、仿生机器人、智能材料、多学科、文献计量
引言
近年来,软体机器人已成为机器人领域发展最快的研究方向之一,其在学术界的兴起表明其具有彻底改变机器人在社会和工业中角色的潜力。尽管前景巨大,但该研究领域尚处于起步阶段。根据文献调查,“软体机器人”一词最初用于描述一种刚性气动机械手,由于气体的可压缩性,该机械手在一定程度上具有对象柔顺性。此后,“软体机器人”一词逐渐被用于各种文章、专利、报告及其他科学文献中,但仍指由刚性材料构成的机器人或类似机器。2008年,“软体机器人”一词被用来描述具有柔性关节的刚性机器人,以及基于软材料、具有大规模灵活性、可变形性和适应性的机器人。
但发明与传统刚性机器人完全不同的新型机器人的努力确实在专业术语出现之前就已经开始了。20世纪50年代,麦基宾为脊髓灰质炎患者的矫形器具开发了编织型气动执行器。麦基宾人工肌肉被广泛研究并应用于不同类型的机器人设计中。1990年,岛路和松本报告了他们在软体手指方面的研究工作。一年后,铃森等人发表了由硅橡胶制成的柔性微执行器,并尝试了多种应用。在接下来的十多年里,类似的结构相继被开发出来,被称为气动波纹管执行器、电致伸缩聚合物人工肌肉执行器、rubbertuator、流体肌肉、气动旋转软执行器、柔性流体执行器、柔性气动执行器、触手式操作器、象鼻式操作器、Air-Octor、OctArm、毛毛虫机器人、Clobot、连续体操作器等。尽管这些执行器和装置在机制、结构和运动性能上各不相同,但它们显然是软体机器人领域中的关键进展。
尽管软体机器人技术已有近半个世纪的历史,但直到最近十年才成为科学界和公众关注的热点。随着这些技术逐渐被机器人技术领域所认可,越来越多的科学家和工程师希望为该领域做出贡献。这体现在不断增加的实验室、国际合作、新兴出版物、软体机器人相关学会和组织、各类国际会议中的专题会议以及专业活动中。尽管软体机器人领域仍处于起步阶段,但已发表多篇综述文章,用以总结研究成果、分析技术方法,并探讨未来面临的挑战和发展前景。这些综述文章通常按照技术内容进行组织,而我们希望通过文献计量分析提供一种不同的视角,展示软体机器人研究领域的历史图谱和整体概貌。
文献计量分析在分析科学出版物方面非常有效,可用于绘制目标主题的历史发展图谱、发现热点、突出活跃研究国家、机构、作者及其合作关系的分布格局,以及出版物的顶级期刊、具有重要影响力的文章和研究趋势。该方法已被广泛应用于化学、经济学、计算机学、管理学、教育学、医学、能源和机器人技术等多个学科领域。然而,据我们所知,这是首次对软体机器人研究领域进行的文献计量分析。我们的目标是通过揭示以下方面来提供该研究领域的总体概览:(1)该主题的历史图谱;(2)主要贡献者:国家、研究机构、研究团队、作者及主要研究领域;(3)国家、机构和作者之间的合作模式;(4)发表文章最多的期刊;(5)被引次数最高的顶级文章;以及(6)研究兴趣与展望。
方法与数据来源
该分析基于1985年至2017年期间发表的与“软体机器人”相关的出版物。文献于2017年8月17日通过科学引文索引扩展版(Science Citation Index-Expanded)和社会科学引文索引(Social Science Citation Index)检索获得,检索式为:“人工肌肉*”或“气动肌肉*执行器*”或“连续型机器人”或“冗余机器人”或“软体机器人”或“可穿戴软体机器人”或“仿生机器人*”或“生物启发机器人*”或“软体结构机器人”或“生物软体机器人”或“仿生*机器人*”或“生物*启发*机器人*”或biorobotic*或微型机器人*或“生物机器人*”或bioactuat*或“冗余执行器*”,并将文献类型限定为主题领域的文章和综述。最终从InCites数据集收集到1495篇文章,数据涵盖截至2017年5月31日在Web of Science (WOS) 中收录的内容。源自英格兰、苏格兰、北爱尔兰和威尔士的文章均归入英国类别下。关键词和国际合作情况由汤森路透数据分析器(Thomson Data Analyzer)进行分析。各期刊的影响因子(IF)依据2016年期刊引证报告确定。由于WOS的“主题”检索涵盖了标题、摘要和关键词字段,并将文献类型定义为文章和综述,因此部分其他相关出版物可能未被纳入。
结果与讨论
全球贡献与领先国家
尽管文献检索涵盖了从1985年到2017年的时间跨度,但关于软体机器人的文章最早发表于1990年。自那时起,70个国家在软体机器人研究领域共发表了1495篇出版物,其中包括37篇基本科学指标(ESI)高被引论文和4篇ESI热点文章。
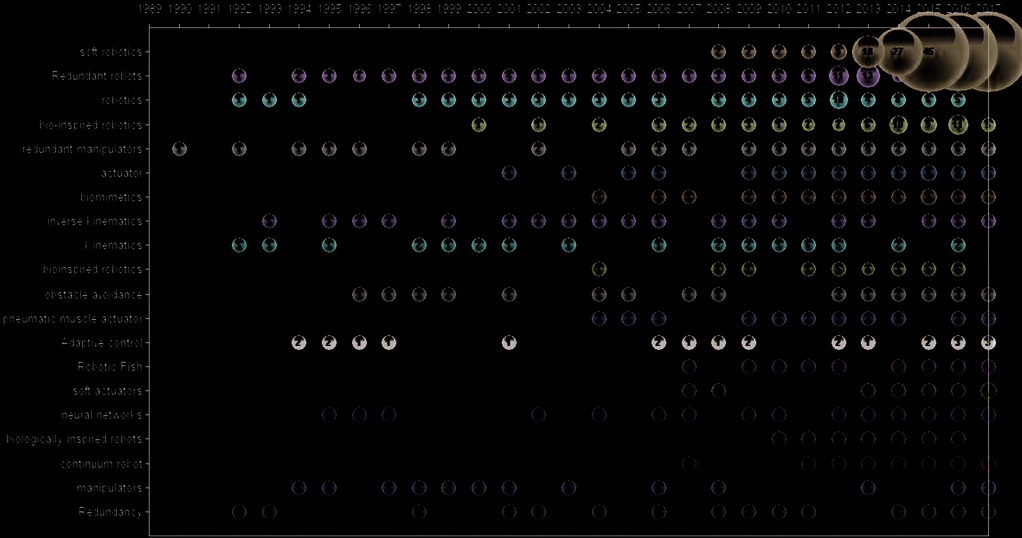
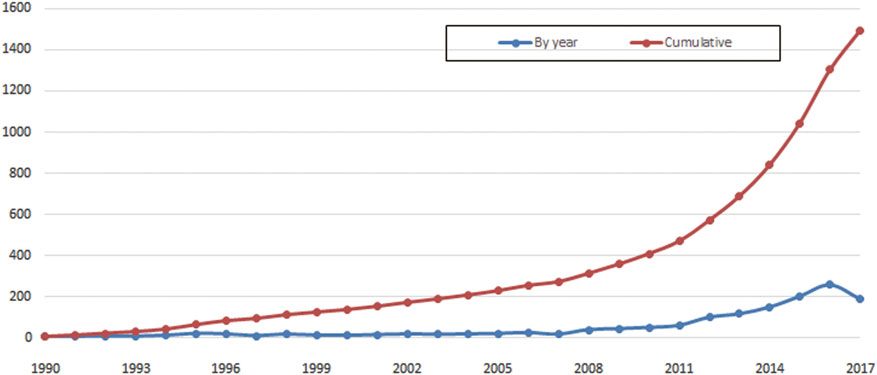
“软体机器人”这一术语最初用于表示具有柔性关节和可变刚度的刚性机器人。随后,软体机器人与传统机器人区分开来,软体机器人成为一个新的多学科领域,涉及基于软材料的结构,在与环境交互时表现出柔顺性和可变形性。从2008年开始,“软体机器人”作为科学文章中的关键词被广泛采用,尤其是在2012年之后,如图1所示。以“软体机器人”为关键词的出版物增长趋势与图2中折线所示一致。尽管与软体机器人相关的首篇文章出现在1990年,但在1990年至2007年间,每年的总出版物数量相对稳定,介于7到27篇之间,表明该领域在当时对科学家和工程师的吸引力有限。
但仅仅一年后(2008年),随着欧洲委员会第七框架计划资助的大规模集成项目OCTOPUS IP的启动,相关出版物数量增加到了41篇。此后趋势持续发展,每年新增数篇文章,直到2012年,年度出版物数量同比增长66%,达到101篇文章。从那时起,每年出版物的增长率相对稳定,2013年、2014年、2015年和2016年的增长率分别为17%、30%、35%和27%。近年来科研与工程界对此领域的浓厚兴趣和大力投入,推动了该领域的迅猛发展,这由出版物数量的大幅增长得以印证。最近5年发表的文章总数是自1990年以来前18年该主题文章总数的三倍多。仅在2017年的前五个月中,软体机器人领域就已经发表了191篇文章,这必将使得今年的发表数量远超2016年的260篇文章。
表1显示了在软体机器人领域出版物数量排名前20的国家。美国以自1990年以来共发表478篇文章位居首位,其次是 中国 (230篇文章)和 意大利 (149篇文章)。尽管我们无法将这种高产归因于特定原因,但这些国家已成为若干新资助计划的重点,例如2008年美国的DARPA ChemBots项目、2016年起中国的重大国家科研资助计划三协机器人,以及意大利Scuola Superiore Sant’Anna生物机器人研究所的OCTOPUS项目。该生物机器人研究所还是由欧盟委员会在未来与新兴技术—FET开放计划下资助的软体机器人协调行动的主要承办机构,组织了一系列活动和事件。
在排名前20的国家的出版物中,有相当大比例(>28%)是国际文章,尤其是荷兰(78.95%)和德国(65%)。这表明软体机器人已吸引了来自全球的科学家和工程师交流思想并相互合作。另一个观察结果是,尽管中国的出版物数量很高(以230篇文章排名第二),但每篇出版物的平均引用次数(ACPP)相对较低,仅为7.7%。目前尚不清楚这是否反映了语言障碍、获取不同出版物的偏见,或是研究本身的范围和质量所致。

主要机构的贡献
表2显示了软体机器人研究领域发表成果最多的前20个机构,及其出版物总数、引用次数和h指数。显然,这些机构大多来自高产国家中的前十名。哈佛大学以最多的出版物数量位居榜首,其次是圣安娜高等学院和中国科学院。在ACPP方面,哈佛大学和麻省理工学院以43.12和40.76分别位居榜首。这两所大学的h指数也最高,分别为27和20。显然,这些机构在推动和发展该领域方面发挥了突出作用。此外,表2中列出的另外四所美国机构也具有相对较高的ACPP值,分别是卡内基梅隆大学(14.57)、加州大学系统(21.67)、密歇根大学(25.25)和康奈尔大学(22.13)。然而,进入前20名榜单的四所中国高校的ACPP值相对较低,<10。与中国在论文发表数量上的地位相比,中国高校在该领域的研究水平和全球影响力方面仍需进一步努力,以匹配其在美国和意大利研究机构面前的地位。
软体机器人:基于文献计量分析的学术洞察与展望
主要研究领域的贡献
众所周知,软体机器人是一个相当新兴的多学科发展领域,该领域也得到了分布在91个WOS研究领域的文章的支持。表3列出了按与软体机器人相关文章数量排名前20的WOS研究领域。毫无疑问,“机器人技术”以557篇文章位居研究领域榜首,紧随其后的是“自动化与控制系统”、“工程学,电气与电子”、“机械工程”、“材料科学,多学科”以及“计算机科学,人工智能”,这些是特别关注软体机器人的主要科学领域。“凝聚态物理”、“化学,多学科”和“物理化学”的ACPP排名领先,ACPP分别为27.33、25.75和24.73。这三个领域与当前软体机器人领域的热点话题——智能材料甚至生物杂交材料密切相关。这些领域较高的ACPP验证了普遍认可的观点:材料是软体机器人发展的关键。
软体机器人研究领域出版物数量领先的期刊
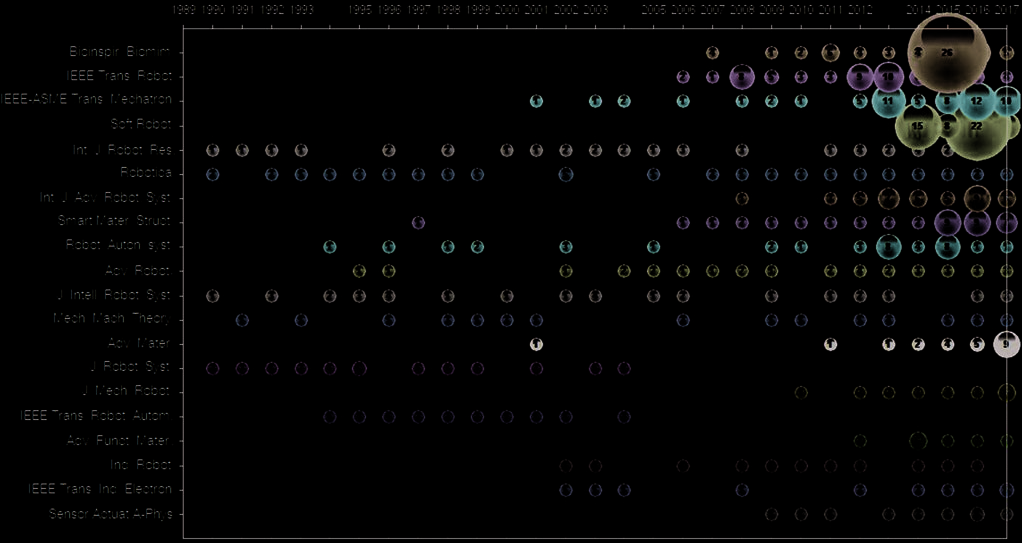
1990–2017年间,与软体机器人相关的1495篇文章发表在357种期刊上。如表4所示,IEEE机器人学汇刊以64篇文章位居首位,其次是生物灵感与仿生学(62篇)、IEEE-ASME机电一体化汇刊(57篇)和软体机器人(53篇)。上述四种期刊合计占总出版物的15.79%,而表4中列出的前20种期刊共发表了656篇文章,占比为43.88%。其余所有期刊的发文量占比均低于1%。从影响因子(IF)来看,除两种材料类期刊先进材料和先进功能材料外,软体机器人的影响因子最高,为8.649。由于其显著高的影响因子,软体机器人在“机器人技术”类别期刊中位居第一,自2015年其首个影响因子被WOS收录以来最近的两个连续年份,如表5所示。
为了展示软体机器人相关出版物在期刊中的历史图谱,我们采用了按年份统计的前20名高产期刊气泡图,如图4所示。可以看出,从1990年到2008年,生产力最高的20种期刊中发表的文章数量很少,且分布稀疏。经过四年显著增长后,软体机器人领域的出版物自2012年起经历了爆发式增长,并呈现出持续上升的趋势。这一模式与图2所示一致。
除了以机器人技术为导向的期刊外,推动软体机器人领域这一增长趋势的顶级期刊还包括材料科学或仿生学领域,例如《智能材料与结构》、《先进材料》、《先进功能材料》和《生物灵感与仿生学》。另一本期刊《科学机器人》于2016年底创刊,未包含在本次分析中。然而,在已出版的9期中,共41篇文章中有13篇与软体机器人相关。软体机器人主题文章占比达31.71%,表明该期刊对这一领域具有浓厚的兴趣和高度关注。
领军作者的贡献
表6显示了基于出版物数量的发表量前十的作者。怀特赛德团队位列榜首,其发表出版物总数为18篇,随后是伍德(13篇)、拉斯奇(12篇)、奇安切蒂(12篇)、于(12篇)和沃尔什(12篇)。在ACPP方面,怀特赛德团队排名第一,数值为69.33,其次是伍德(34.85)和拉斯奇(32.25)。怀特赛德团队还获得了最高的h指数14,其次是伍德(11)和拉斯奇(6)。有趣的是,怀特塞兹教授实验室位于化学系,这使他能够从化学和材料的角度开发软体机器人。表7列出了总引用次数最高的前五位作者,他们均来自怀特塞兹研究团队。所有这前十位高产作者均来自三个最高产的国家,表明该领域存在某些集中的研究团队,例如哈佛大学的怀特塞兹研究团队和欧洲(主要在意大利圣安娜高等学院)的章鱼研究团队。然而,前十位作者的文章数量占总出版物的比例仅为7.88%,这意味着大量研究人员正在这一领域工作,并为总共1495篇出版物做出了贡献。这一研究群体的广泛参与必将推动该领域在不久的将来取得非凡进展和多样化成果。
高被引文章分析
尽管文章的引用影响力会受到许多因素的影响,但它仍然是评估科学文献的广泛接受的指标。我们列出了前十篇高被引文献进行分析,如表8所示。被引次数最高的文章是Pfeifer等人在《科学》上发表的《Self-organization, embodiment,and biologically inspired robotics》,其总引用次数居首(356次)。而《多步态软体机器人》和《一种具有电和机械自修复功能的复合材料及其在电子皮肤应用中的压力和弯曲敏感特性》分别以353和330的总引用次数位列第二和第三,年均引用次数也相当高(分别为50.4和55)。此外,值得注意的是,2015年发表在《自然》上的文章《软体机器人的设计、制造与控制》年均引用次数高达69,这在一定程度上反映了该领域受到的广泛关注。
在这些排名前十的文章中,有6篇发表于《科学》、《自然》和IEEE transactions等顶级期刊。特别值得注意的是,其中有八篇来自美国的研究机构(其中两篇的合著者分别来自意大利和韩国的研究机构),表明美国是该研究领域的领先国家。另外两篇文章分别由瑞士和中国研究人员撰写。怀特赛德团队再次展现出其在软体机器人领域的地位和影响力,贡献了被引频次最高的10篇出版物中的2篇。此外,《软体机器人的设计、制造与控制》(2015)位居ESI热点文章首位,紧随其后的是《可拉伸、可贴附于皮肤并可穿戴的应变传感器及其潜在应用:综述》(2016)、《用于综合辅助和家庭康复的软体机器人手套》(2015)以及《组织工程软体机器鳐的趋光性引导》(2016)。
研究兴趣和展望
如表9所列,第一篇关于软体机器人的综述发表于1999年。在接下来的十年中没有其他综述出现,直到2008年软体机器人引起了广泛关注。此后,每年都有关于软体机器人的综述文章。特别是从2014年以来,每年至少有四篇关于该主题的综述,这再次表明软体机器人是机器人领域的一个研究热点。软体机器人技术的多学科性质以及作者们不同的专业背景,导致了他们在出版物中的内容、分析视角和论点具有多样性。尽管视角不同,但表9中列出的所有综述都是从技术角度出发撰写的,如执行器、制造、控制、材料、感知、仿真、仿生学、刚度、建模、动力、运动和应用,如表10所示。
大多数综述涵盖了全球该领域的最新研究工作,并总结了表10中所列的技术方面。评论者总是以对当前问题和未来工作的展望作为结论。这些关于技术的总结、评论和建议对该领域的同行研究人员和潜在追随者具有重要意义。因此,鼓励读者参考表9中列出的综述文献。此外,这些文章还包括对新的研究方向和想法的讨论,有望引导并激发创造性工作。大多数综述中提到了智能材料(参见表10),并且在多数文献中进行了深入讨论。Walker和饭田认为,材料科学与工程学之间的合作将有益于软体机器人技术的发展,而非孤立的工作。仿生学也被视为软体机器人的重要灵感来源,但大多数文章提醒,从生物形态和运动中学习并非全部内容。源于生物学的技术或理念,例如组织工程、伪装、自清洁和自修复,甚至生长,有望被整合到该领域中,以创造类生命(或甚至是活体)的软体机器人。软体机器人发展的另一个重大挑战是快速虚拟原型技术,例如3D打印,这需要特殊的建模和仿真工具,与刚性机器人所使用的工具完全不同。
此外,还提出了一些新的先进理念,例如用于软体机器人构建、建模和控制的机械智能以及任务分配。Pfeifer等人和饭田和拉斯奇倡导了形态计算与计算与软体机器人的具身控制,这一点也得到了Rus和Tolley的认同。与传统的刚性机器人类似,软体机器人研究起源于社会驱动力,并有望发展为商业产品。这将涉及解决成本和安全性的挑战、电源、能量收集以及用户与操作界面。
尽管有上述各个方面,但要开发出有用且可持续的软体机器人,仍需在共同的基础理论方面取得进展,以形成一个基础设施框架。这项理论工作既需要深厚的数学知识,也需要对软体机器人有透彻的理解。这是这一新兴学科面临的一项重大挑战,需要来自机器人技术、机械工程、材料科学、计算机科学、控制、化学、物理学、生物学和数学等不同科学背景的科学家和工程师共同努力。此外,他们还需紧密合作,以在理论研究中取得实质性成果。
结论
尽管软体机器人是一个相对较新的领域,但毫无疑问,它是机器人技术中一个快速发展的主题。不断涌现的出版物、新推出的相关期刊以及公众的兴趣都支持了这一观点。该领域正在迅速扩展,在美国、欧洲和亚洲的机构贡献了大部分原创研究,推动了基础设施建设,并巩固了学术界。
软体机器人的发展需要在复杂结构、感知、控制和动力系统方面取得新的进展,这些进展越来越依赖于材料科学及其相应制造技术的进步。这一点体现在该领域的文章数量和影响力上,许多文章讨论了智能材料的应用,同时材料科学期刊也出现在软体机器人出版物的顶级榜单中。
就期刊而言,IEEE机器人汇刊在前20名中排名第一,而软体机器人期刊在最近连续两年中位居“机器人技术”类别期刊的首位。
Whitesides、Wood和Laschi是根据ACPP评估和h指数排名最高的三位高产作者。此外,Whitesides研究团队占据了总引用次数最高的前五位作者的所有位置,表明其在全球软体机器人领域具有强大的影响力。除了前十位作者外,还有大量研究人员在该领域工作,他们贡献了92.12%的出版物。
对软体机器人领域的综述分析表明,以下方面最受研究人员关注:驱动器、制造、控制、材料、感知、仿真、仿生学、刚度、建模、动力、运动和应用。此外,智能材料、仿生学、形态计算和具身控制等多学科领域预计将对未来该领域的发展做出重要贡献。一些综述讨论了商业化道路上的障碍,但建立机器人设计与控制的通用基础理论似乎是软体机器人成为一门独立学科的关键需求。

















 1419
1419

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









