




速度(节拍)
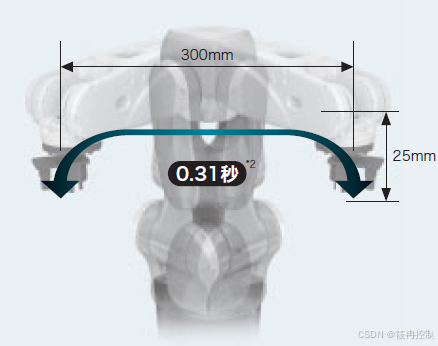
传统伺服机器人,尤其是小型桌面型机器人,以ABB为例,TCP的最高可以达到5m/s,同比之下协作机器人普遍只能做到1m/s 很多机器人厂家用节拍时间拍评估速度指标,右图所示的循环一个来回只需要0.3s左右
相比之下,协作的速度就慢得多(主要是硬件导致,结构更紧凑也就意味着损失效率) 目前愿意使用协作机器人的,往往速度都不是他们的最优先考虑,精度也只要能用就行
精度(重复定位)
传统伺服机器人已经做得相当成熟,一般精度可以做到正负0.03mm 比较优秀的可以做到正负0.02mm,比如STABIL,不仅是精度,他的防护等级还非常高,可以泡在水里用

大相比之下,协作机器人的精度就差得多了,大部分只能做到±0.1mm 感兴趣的客户可以去他们官网了解他们的产品http://www.hansmotor.com/gongyejiqiren.html。很多协作虚标了,实际达不到的,或者用一段时间就没这个精度了。后面发现大家都虚标,自己不虚标就不行。

精度(绝对定位)
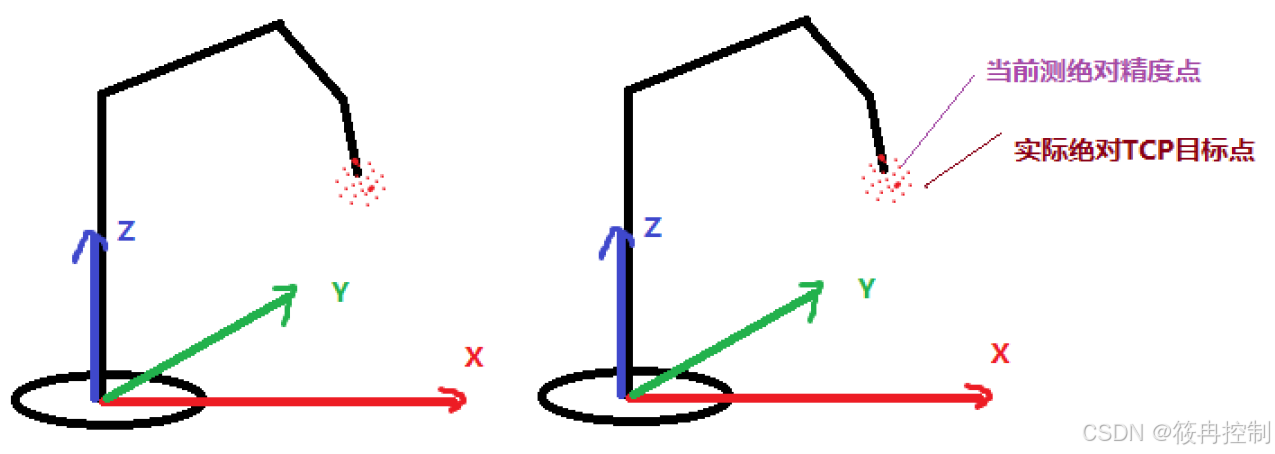
重复定位精度是指一台机器人多次走到一个目标点,由于电机和传动误差导致的机器人末端的实际点的偏差(并不关心每次实际的XYZ和理想的XYZ的差距,只关心多次实际的XYZ之间的差异,即下图左侧跑了一千次,包络球体的半径就可以认为是重复定位精度) 绝对定位精度是指一台机器人随机走到一个期望的TCP点,最终的实际XYZ和理想的XYZ的差距(当然每次要求机器人走的期望点不同,理想和实际的误差也是不同的,一般一个流程几十个点下来取综合均方差)。绝对定位精度误差是包含重复定位精度误差的,但是一般绝对定位精度会比重复定位精度差一个数量级
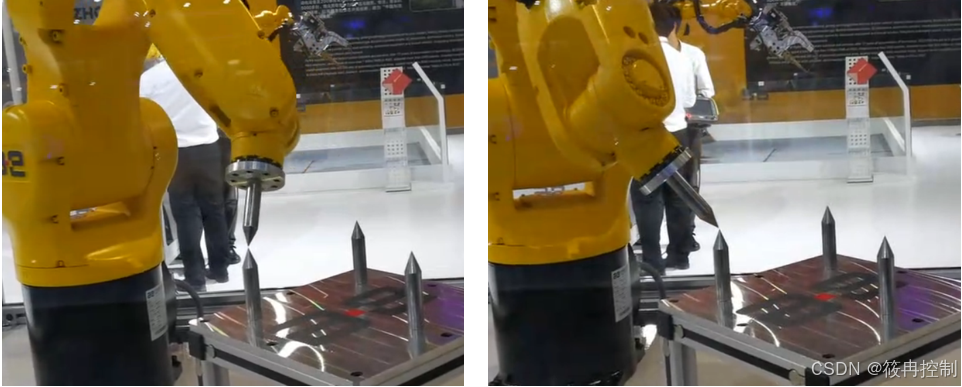
下图所示的让机器人始终绕着某个固定期望TCP点转动(保持XYZ不动)就是在演示绝对定位精度。因为每次控制机器人到期望的点是固定的,而且如果理想和实际差距较大,则肉眼能看到两个针尖错位。如果看不到错位,则说明误差小于1mm(如果要演示重复定位精度,就应该是往复运动,不断的戳一个固定的点,看打的孔是否在同一个地方) 大部分情况下,重复定位精度更重要,因为比如做一个上下料,我们调好点之后,只要几千次上下料都在这个地方附近零点几毫米就可以了,至于这个地方实际和理想XYZ差了几毫米,不影响干活。
稳定性
传统伺服机器人的稳定性毋庸置疑,你只要看不能停产的汽车厂用什么设备,就知道什么设备是稳定的 机器人的稳定性,主要是伺服和驱动器的稳定性,因为传统伺服已经发展很多年了,在使用中的很多比如电磁干扰,散热,响应速度等问题都已经得到了很好的解决

相比之下,新出现的协作机器人,还是比较容易受到电磁干扰,发烫,防尘,抖动等等问题也是客户经常抱怨的问题 但随着模块化的性价比进一步提高,稳定性增强,是未来发展趋势(事实上电路板太接近高粉尘,高磁场环境,肯定容易坏)
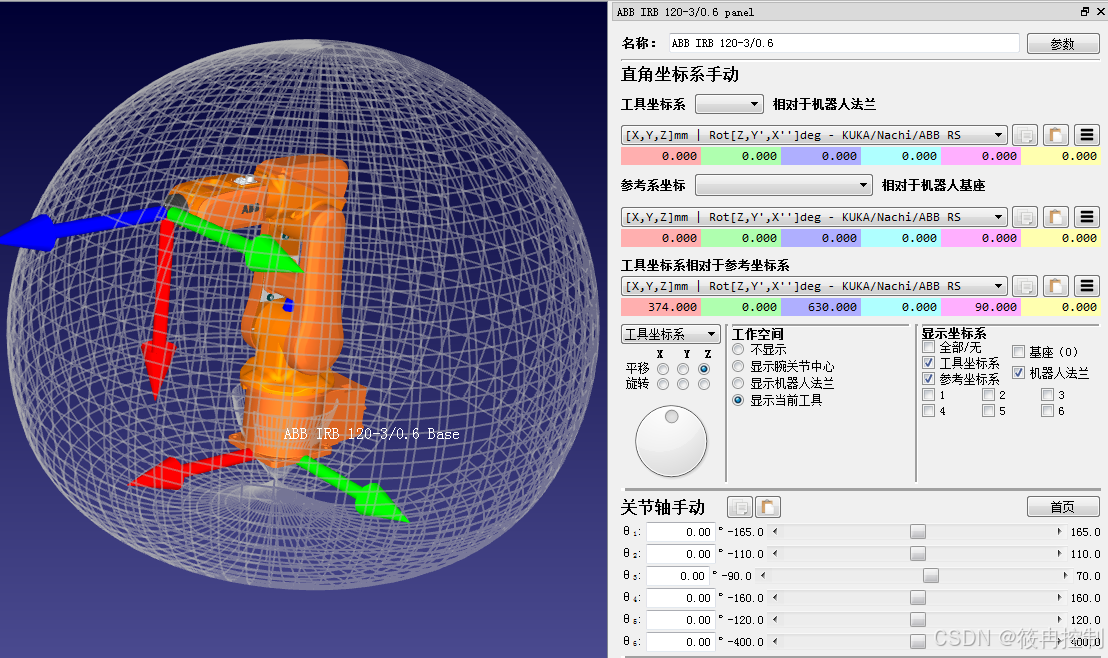
工作空间
工作空间是指机器人能够走到并且能够实现任意位置姿态的空间点的集合 协作机器人由于关节驱控一体更加紧凑,减少了一部分皮带和齿轮传动等环节,可以实现更大一点的工作空间
相比之下,传统工业机器人的工作空间就要小得多(并不是一个标准球体) 你可以看到很多关节的限位导致不能走到±180度的,比如J2只能走[-90,70]的活动范围
安全性
协作机器人的安全性是很好的一个改进即便不考虑撞人,如果撞坏一个工业相机也是几万块 原理上,有通过关节电流,有通过外表面喷涂层,也有底座加力传感器等等策略

相比之下,传统工业机器人都会要求设置围栏,安全屏障 然而这并不能做到真正的安全,机器伤人,尤其是人员调试的时候无法避免(普通工业如果要安全,一般是穿外衣,电流电阻方式感应接触)

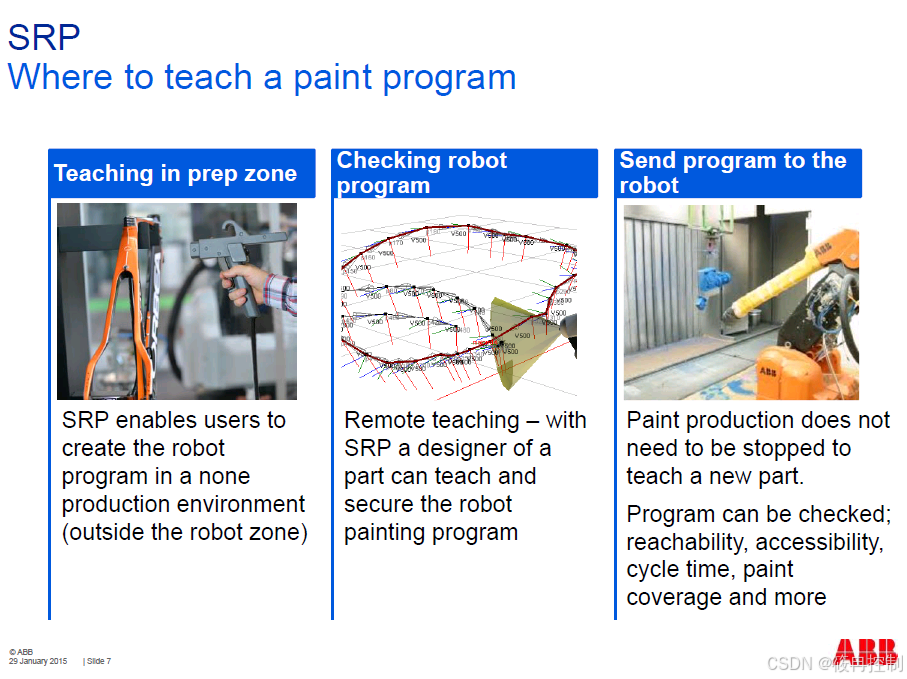
易用性
需要专业的编程人员,普通工程师需要较长的时间入门,到熟练使用可能需要半年 排除编程的因素本身,本身四大家族的资料开放性不够,比如模拟软件,通讯资料,工艺软件包都是单独收费的,对外的培训也是收费很高,一般企业难以承受,只能靠自己工程师摸索
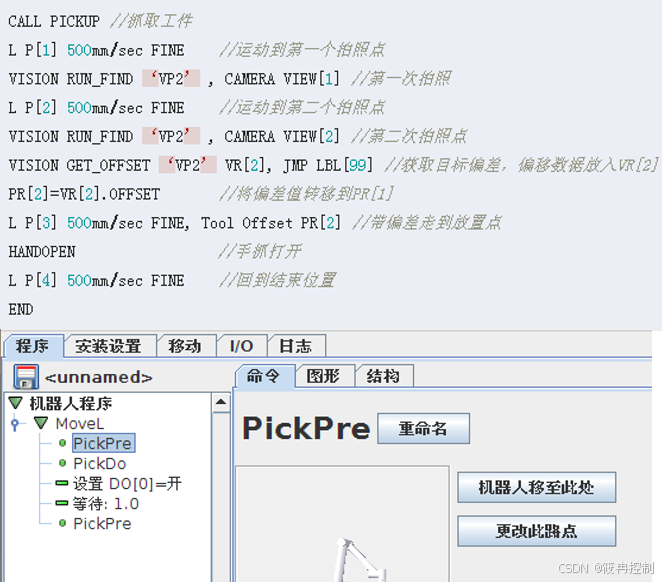
现在四大家族也开始往易用性上探索,因为工程师的待遇越来越高,切换和部署的学习成本也就跟着越来越高,已经成了制约发展的重要因素 软件上改进无外乎图形化,拖拽化,流程图,时间轴图的方式等等。但也不仅仅是编程方式,更多外设的融入可以更好的得到复杂示教轨迹
可维护性
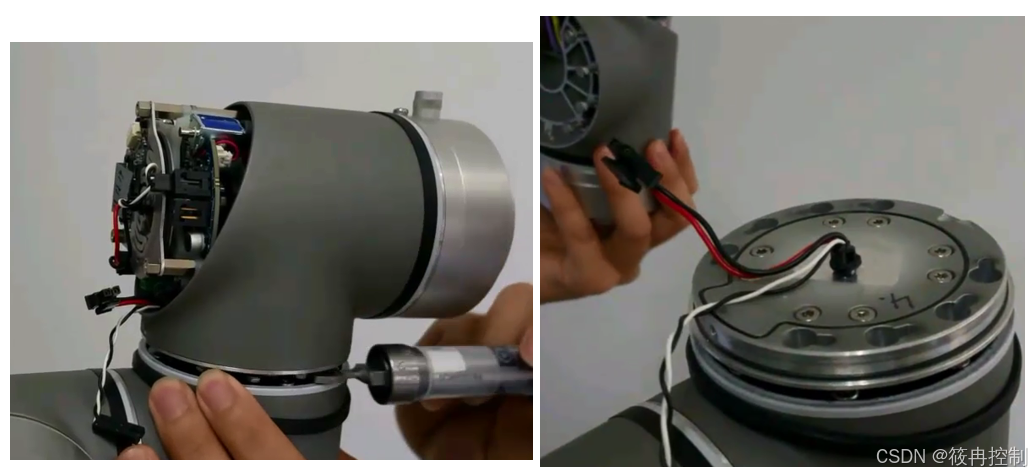
传统工业机器人故障,损坏,重新标定,甚至维护保养都有相当繁琐的流程
协作机器人推崇的模块化的理念还是不错的。让零件像电脑硬件一样可以快速插拔,替换,未来也是一个发展趋势,一般工程师可以半个小时学会拆装。


















 651
651

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











