







柔性生产,柔性装配
这里有一个接插件的演示,因为把塑料卡扣扣好这个过程,如果纯粹使用位置控制,很容易弄坏产品的,所以柔性是智能制造的一个发展趋势(因为简单走点是搞不定的,要加一些力传感器或者用机器人本身的力控不断微调)

这里同样是打磨抛光,借助了末端力传感器,机器人本身根据传感器的力反馈调节轨迹(跟前面气动浮头打磨的原理上是不一样的),实测中,这种力传感器方案并不好,因为机械方式的类似弹簧作用是立即的,真正柔性的。而这种方式机器人本身还处于位置模式下,是刚性的(微调效果不理想),更多的是方便做一些科研测试

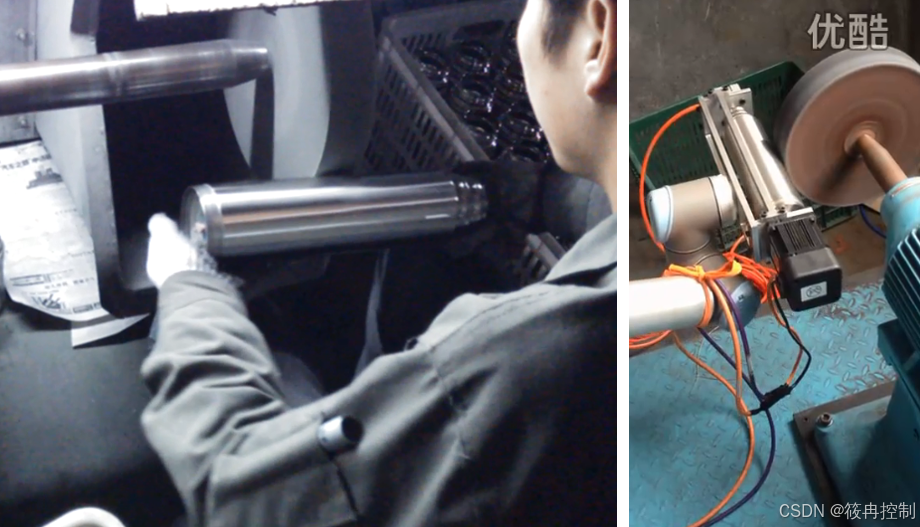
这个也是我实际接触的一个案例,虽然看起来人工磨的过程也没那么复杂,但是机器人去替换还是只有一小部分能磨好(读者可以看到机器人末端没有力传感器,但是实际上机器人是可以根据关节力合成到末端力的,所以末端力是可以算法算出来的,只不过这种精度不太高,大概±10N,粗糙的应用也能搞)
餐饮娱乐
类似于机器人调酒泡咖啡,做面条,做冰激凌(能够比较实现自动化的食品),未来
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











