







基本运动分类
平移运动:
一个直线运动能实现一个平移的自由度,多套直线模组的组合能实现XYZ平面的运动 严格来说气动手指也能实现一个平移自由度,但是并不是完整的自由度,他只能在两点之间开合
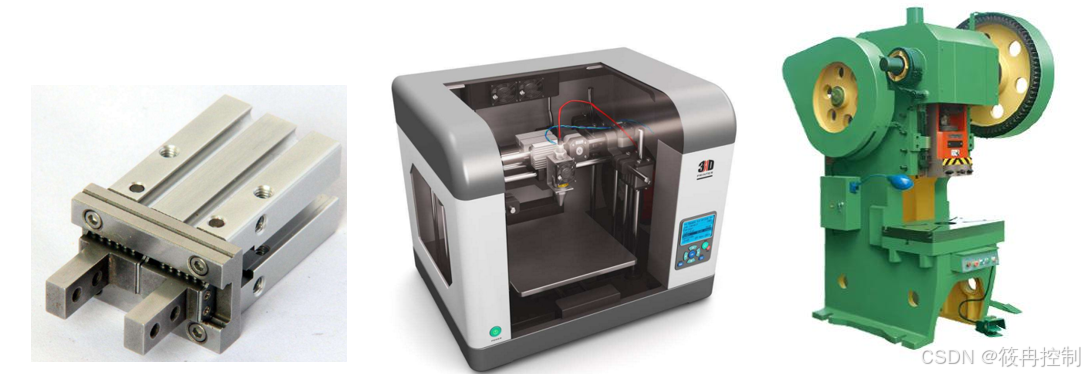
旋转运动:
一个旋转关节能实现一个转动自由度,多个旋转关节构成了多关节的机械臂,多个旋转环节的插补也能实现平移运动(例如多轴机器人的直线插补) 剪刀样子的气动手指也能实现一个旋转自由度,但是并不是完整的自由度,他只能在两点之间开合

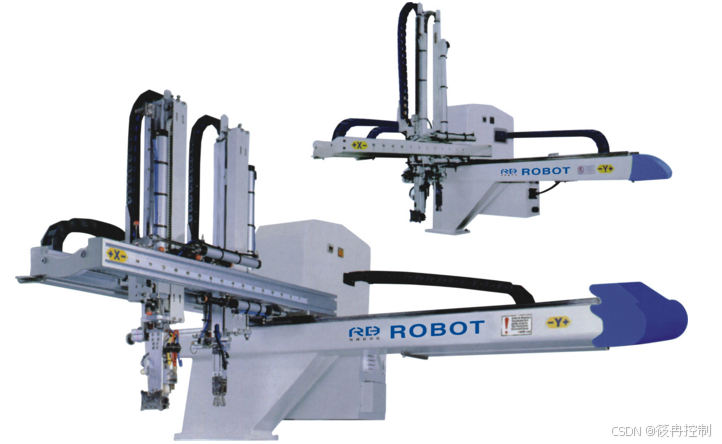
四轴XYZ机器人方案
典型的四轴上下料机器人: 三个直线模组+一个旋转也能实现平面物体的抓放。这种传统的结构已经广泛应用于冲床上下料,注塑机取料等行业
四轴SCARA机器人方案
结构紧凑,精度高,速度快,但是只能完成平面内的运动,而且负载能力比较低,也没法抓放很大的工件(广泛应用于电子3C行业的检测装配)

四轴并联D
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











