



在C++编程中,auto关键字虽然提供了便利的类型推断功能,但在使用Eigen库进行线性代数运算时,过度依赖auto可能导致严重的运行时错误和性能问题。比如我们在计算传感器之间的变换矩阵时,分别已知传感器AB到C的变换矩阵,那么计算A到B的变换矩阵时,不可避免的需要求逆计算。本文将详细分析这一问题,并提供相应的解决方案。
1. 问题复现
首先我们定义4个外参矩阵:
std::vector<Eigen::Matrix4d> getTransformations() {
std::vector<Eigen::Matrix4d> mats(4);
mats[0] << 0.999981, -0.00415212, -0.00466134, 0.71, //
0.00414895, 0.999991, -0.000689198, 0, //
0.00466416, 0.000669844, 0.999989, 1.85264, //
0, 0, 0, 1;
mats[1] << -0.999819, -0.0184469, -0.00462907, 0.800784, //
-0.00444588, -0.00995929, 0.999941, 0.601399, //
-0.0184919, 0.99978, 0.00987548, 1.63478, //
0, 0, 0, 1;
mats[2] << 0.00987783, 0.00454281, -0.999941, -0.910941, //
-0.999715, -0.0216873, -0.00997413, -0.002741, //
-0.0217313, 0.999754, 0.00432729,
1.19948, //
0, 0, 0, 1;
mats[3] << 0.999939, 0.00712378, 0.00849454, 0.811098, //
0.00856168, -0.00944788, -0.999919, -0.620238, //
-0.00704294, 0.99993, -0.00950829,
1.67974, //
0, 0, 0, 1;
return mats;
}
然后我们计算所有矩阵相对于首帧的变换矩Ti=T0−1⋅TiT_{i} = T^{-1}_{0} \cdot T_{i}Ti=T0−1⋅Ti:
const auto raw_mats = getTransformations();
std::vector<Eigen::Matrix4d> T_sensors2base = raw_mats;
// 注意这里,我们用了auto来承载第一个矩阵的逆矩阵
const auto T_trans = T_sensors2base[0].inverse();
const int num = T_sensors2base.size();
for (int i = 0; i < num; i++) {
auto &T = T_sensors2base[i];
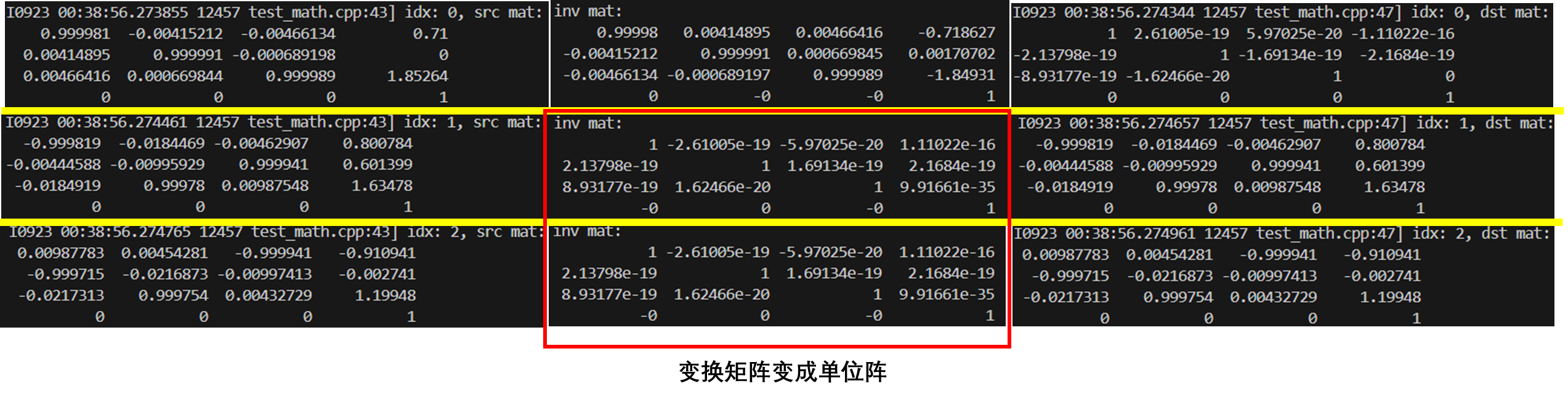
LOG(INFO) << "idx: " << i << ", src mat: \n"
<< T << "\ninv mat: \n"
<< T_trans;
T = T_trans * T;
LOG(INFO) << "idx: " << i << ", dst mat: \n" << T;
}
观看实际结果,第一个矩阵变成单位阵没问题,但从第二个矩阵开始,变换矩阵莫名奇妙变成单位阵了!!!
2. 原因分析
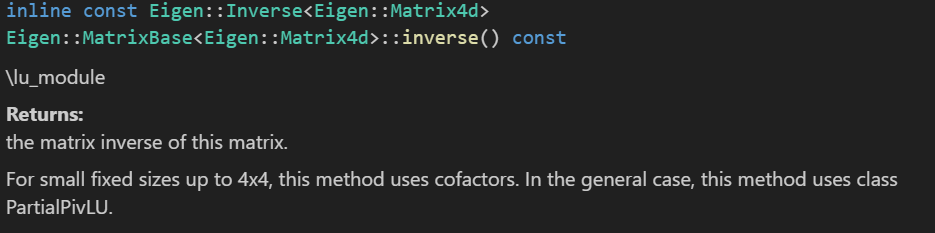
Eigen库采用表达式模板技术来优化矩阵运算,这种设计会导致auto推断出临时表达式类型而非最终结果类型。我们可以发现inverse()的返回值是Eigen::Inverse<Eigen::Matrix4d>而非我们以为的Eigen::Matrix4d类型。这个表示的是"将来需要计算A的逆"的表达式模板对象。
基于这个逻辑,那么:
- 计算第一个矩阵时,实际是
T_sensors2base[0] = T_sensors2base[0].inverse() * T_sensors2base[0],T_sensors2base[0]变为单位阵。 - 但计算第二个矩阵时,实际是
T_sensors2base[1] = T_sensors2base[0].inverse() * T_sensors2base[1],T_sensors2base[0]已经是单位阵了,因此没有得到我们预想的结果。
3. 解决方案
知道了问题,那么解决方案就非常简单咯,显示定义Eigen::Matrix4d来存放这个逆矩阵即可。这种方法通过强制类型转换和立即求值,确保了逆矩阵被正确计算并存储在确定类型的变量中。
// const auto T_trans = T_sensors2base[0].inverse();
const Eigen::Matrix4d T_trans = T_sensors2base[0].inverse();

4. 小结
本文介绍的auto问题,不会在编译时被捕获。更危险的是,表达式模板的生命周期结束时,使用auto声明的变量可能持有悬空引用,导致难以调试的运行时错误。
当然,慎用auto不代表不能用,有几个技巧可以在实际开发时注意下:
- 显式指定类型。对于矩阵/向量变量,始终使用具体类型如Eigen::MatrixXd、Eigen::Vector3f等来表示。
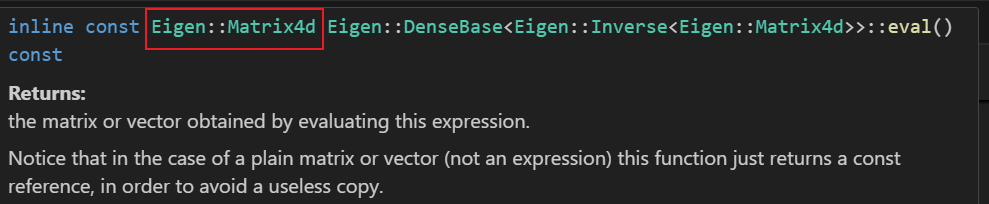
- 强制立即求值。如果待处理的公式包含大量矩阵变换,我们可以先用auto把这个复杂表达式构造出来,然后使用
.eval()方法强制求值并转换为具体类型。
- 调用函数时确认下返回值。鼠标悬停函数上即可看到函数定义细节(如果没有快去安装vscode插件→_→)

















 2792
2792

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









