



 本文介绍了解决在使用colcon build编译turtlesim2时遇到的错误的方法,涉及修改/rosidl_typesupport_opensplice_cpp/__init__.py文件的具体步骤,通过更新依赖路径和模板路径设置,确保编译过程顺利进行。
本文介绍了解决在使用colcon build编译turtlesim2时遇到的错误的方法,涉及修改/rosidl_typesupport_opensplice_cpp/__init__.py文件的具体步骤,通过更新依赖路径和模板路径设置,确保编译过程顺利进行。
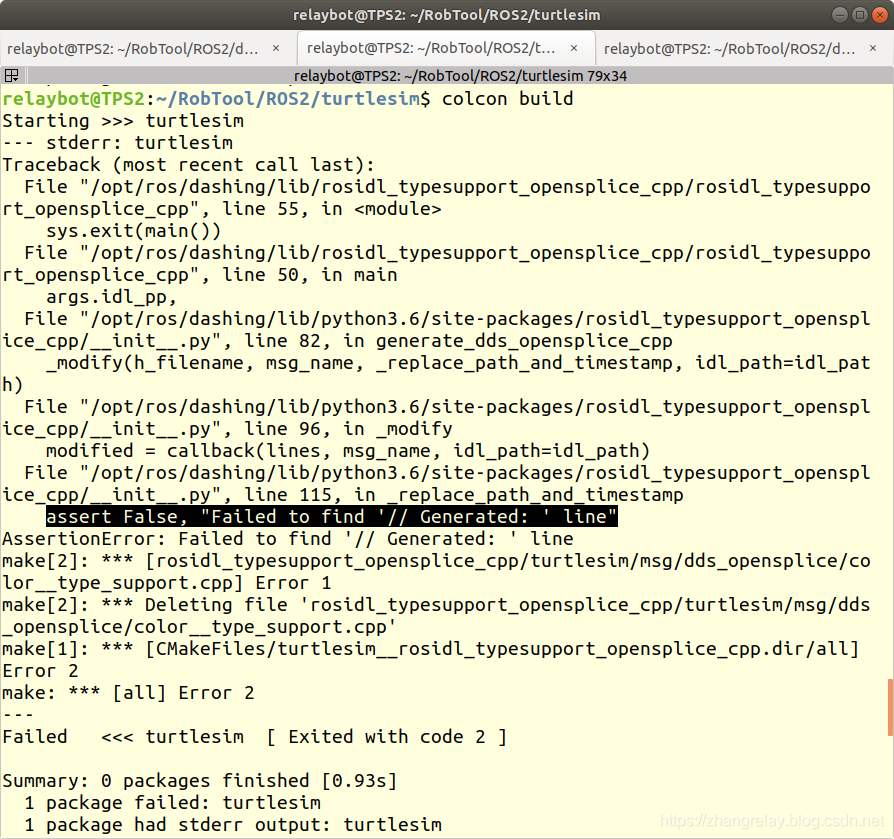
使用colcon build编译turtlesim2,可能会出现如下错误:
需要修改,/opt/ros/dashing/lib/python3.6/site-packages/rosidl_typesupport_opensplice_cpp/__init__.py
使用如下代码进行替换,2019-08-05。
# Copyright 2014-2018 Open Source Robotics Foundation, Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import os
import subprocess
from rosidl_cmake import generate_files
def generate_dds_opensplice_cpp(
pkg_name, dds_interface_files, dds_interface_base_path, deps, output_basepath, idl_pp
):
include_dirs = [dds_interface_base_path]
for dep in deps:
# only take the first : for separation, as Windows follows with a C:\
dep_parts = dep.split(':', 1)
assert len(dep_parts) == 2, "The dependency '%s' must contain a double colon" % dep
idl_path = dep_parts[1]
idl_base_path = os.path.dirname(
os.path.dirname(os.path.dirname(os.path.normpath(idl_path))))
if idl_base_path not in include_dirs:
include_dirs.append(idl_base_path)
if 'OSPL_TMPL_PATH' in os.environ:
include_dirs.append(os.environ['OSPL_TMPL_PATH'])
for idl_file in dds_interface_files:
assert os.path.exists(idl_file), 'Could not find IDL file: ' + idl_file
# get two level of parent folders for idl file
folder = os.path.dirname(idl_file)
parent_folder = os.path.dirname(folder)
output_path = os.path.join(
output_basepath,
os.path.basename(parent_folder),
os.path.basename(folder))
try:
os.makedirs(output_path)
except FileExistsError:
pass
# idlpp doesn't like long path arguments over 256 chars, get just the filename
filename = os.path.basename(idl_file)
cmd = [idl_pp]
for include_dir in include_dirs:
cmd += ['-I', include_dir]
cmd += [
'-S',
'-l', 'cpp',
'-N',
'-d', output_path,
'-o', 'maintain-include-namespace',
filename
]
if os.name == 'nt':
cmd[-1:-1] = [
'-P',
'ROSIDL_TYPESUPPORT_OPENSPLICE_CPP_PUBLIC_%s,%s' % (
pkg_name,
'%s/msg/rosidl_typesupport_opensplice_cpp__visibility_control.h' % pkg_name)]
subprocess.check_call(cmd, cwd=folder)
# modify generated code to
# remove path information of the building machine as well as timestamps
msg_name = os.path.splitext(filename)[0]
idl_path = os.path.join(
pkg_name, os.path.basename(parent_folder), filename)
h_filename = os.path.join(output_path, '%s.h' % msg_name)
_modify(h_filename, msg_name, _replace_path_and_timestamp, idl_path=idl_path)
cpp_filename = os.path.join(output_path, '%s.cpp' % msg_name)
_modify(cpp_filename, msg_name, _replace_path_and_timestamp, idl_path=idl_path)
dcps_h_filename = os.path.join(output_path, '%sDcps.h' % msg_name)
_modify(dcps_h_filename, msg_name, _replace_path_and_timestamp, idl_path=idl_path)
dcps_cpp_filename = os.path.join(output_path, '%sDcps.cpp' % msg_name)
_modify(dcps_cpp_filename, msg_name, _replace_path_and_timestamp, idl_path=idl_path)
return 0
def _modify(filename, msg_name, callback, idl_path=None):
with open(filename, 'r') as h:
lines = h.read().split('\n')
modified = callback(lines, msg_name, idl_path=idl_path)
if modified:
with open(filename, 'w') as h:
h.write('\n'.join(lines))
def _replace_path_and_timestamp(lines, msg_name, idl_path):
found_source = False
for i, line in enumerate(lines):
if line.startswith('// Source: '):
assert not found_source, "More than one '// Source: ' line was found"
found_source = True
lines[i] = '// Source: ' + idl_path
continue
if line.startswith('// Generated: '):
assert found_source, "No '// Source: ' line was found before"
lines[i] = '// Generated: timestamp removed to make the build reproducible'
break
return lines
def generate_typesupport_opensplice_cpp(arguments_file):
mapping = {
'idl__rosidl_typesupport_opensplice_cpp.hpp.em': # noqa
'%s__rosidl_typesupport_opensplice_cpp.hpp',
'idl__dds_opensplice__type_support.cpp.em': 'dds_opensplice/%s__type_support.cpp',
}
generate_files(arguments_file, mapping)具体原因分析参考:
1. https://github.com/ADLINK-IST/opensplice/issues/92
2. https://github.com/ros2/rosidl_typesupport_opensplice/pull/33


















 4186
4186

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











