




 本文详细介绍了在ROS2GO环境下TurtleBot2与TurtleBot3的配置过程,针对不同ROS版本提供了最佳环境建议,并分享了功能包安装与源码编译的步骤。通过具体示例,如使用catkinbuild安装依赖,编译源码及测试运行,帮助读者快速上手。
本文详细介绍了在ROS2GO环境下TurtleBot2与TurtleBot3的配置过程,针对不同ROS版本提供了最佳环境建议,并分享了功能包安装与源码编译的步骤。通过具体示例,如使用catkinbuild安装依赖,编译源码及测试运行,帮助读者快速上手。
ROS2GO之TurtleBot学习与使用资料
TurtleBot2最佳环境为indigo或kinetic,TurtleBot3最佳环境为kinetic或melodic。
ROS2GO-Kinetic版本已经配置完全,这里不在细说,直接使用官网教程学习即可。
ROS2GO-Melodic版本功能包安装无法使用,使用源码编译即可。
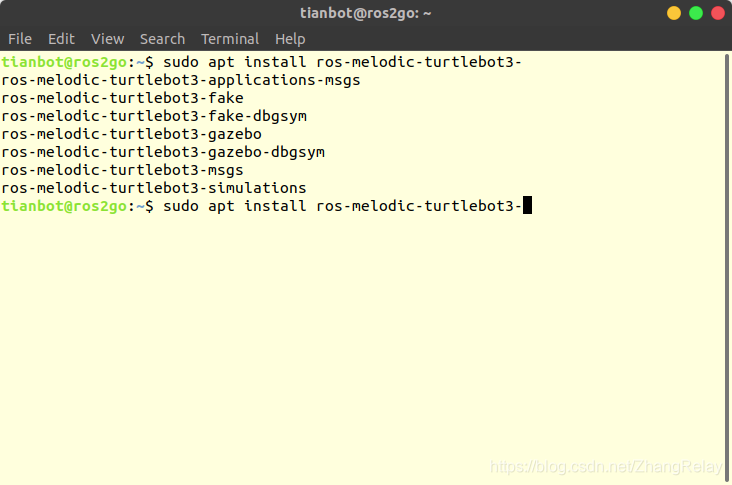
功能包过少,需要自行编译源码。
从github下载如下源码进行编译:
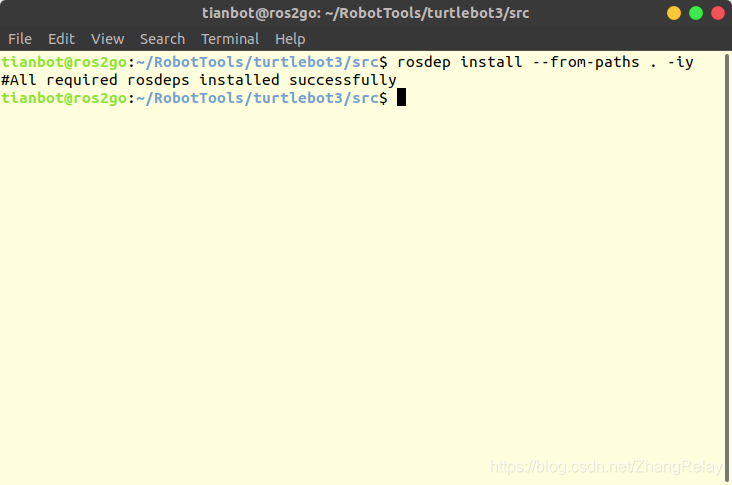
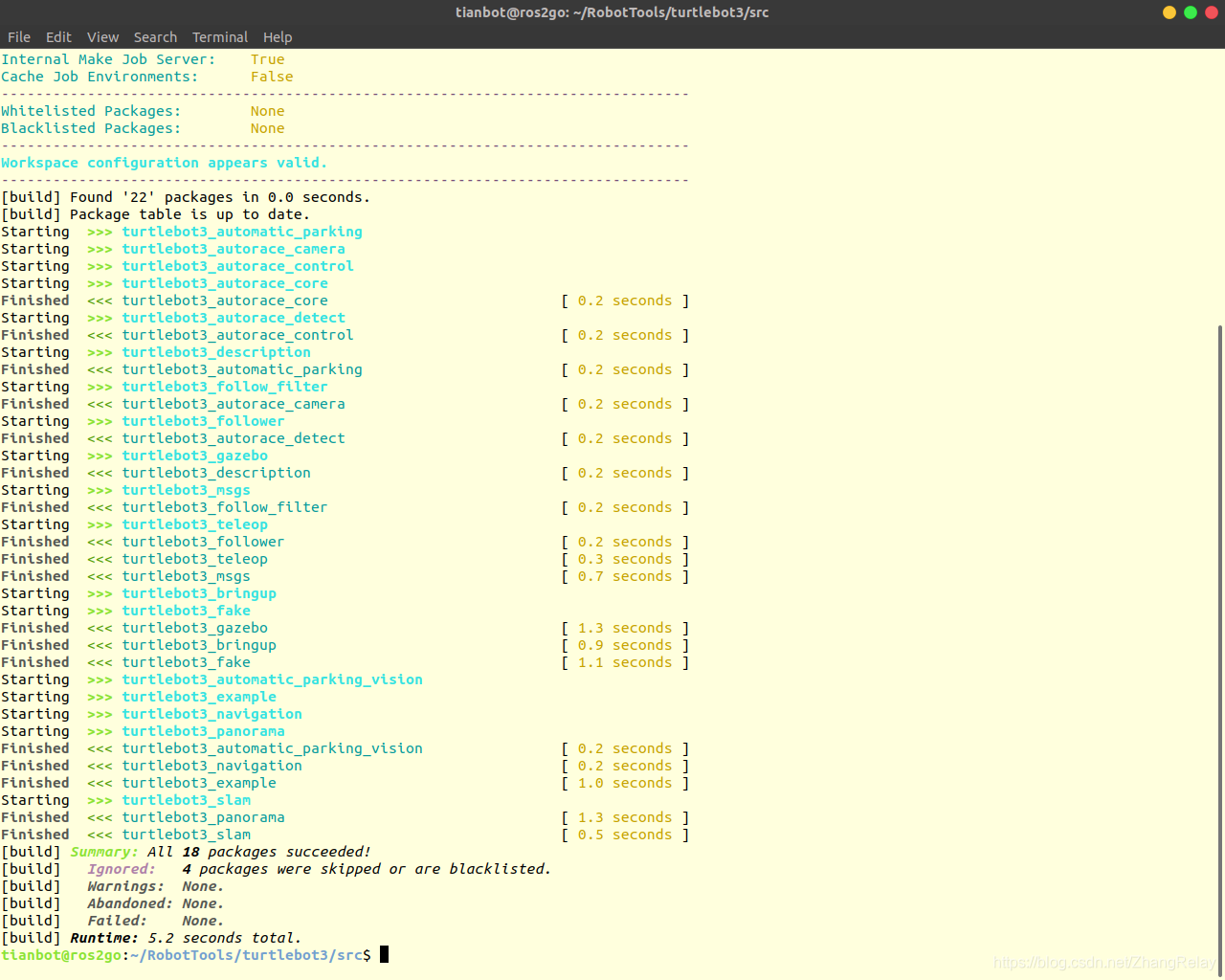
使用catkin build,安装缺失的依赖使用rosdep install --from-paths . -iy
编译完成后,更新配置文件即可使用(source setup.bash)。
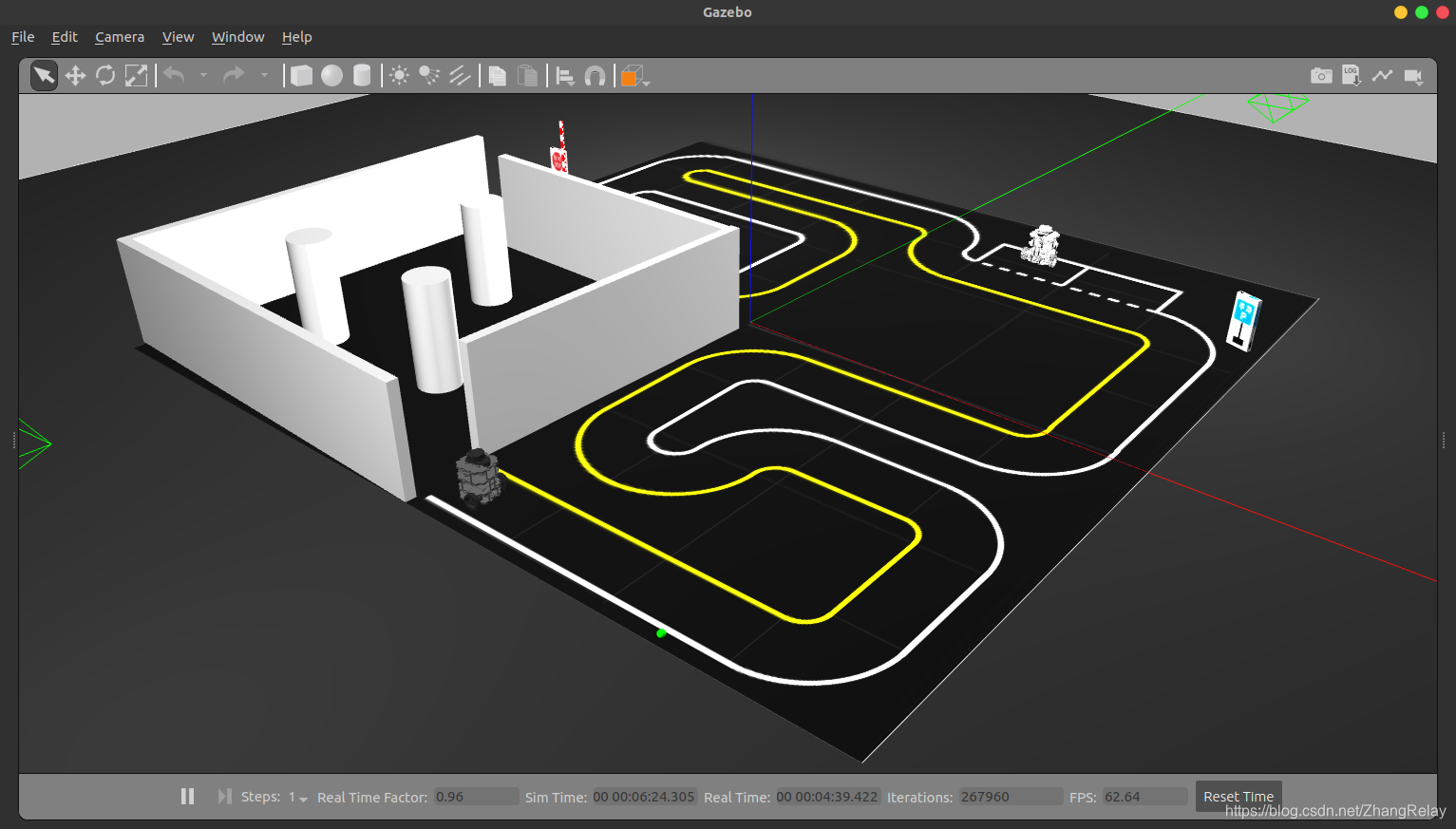
测试:
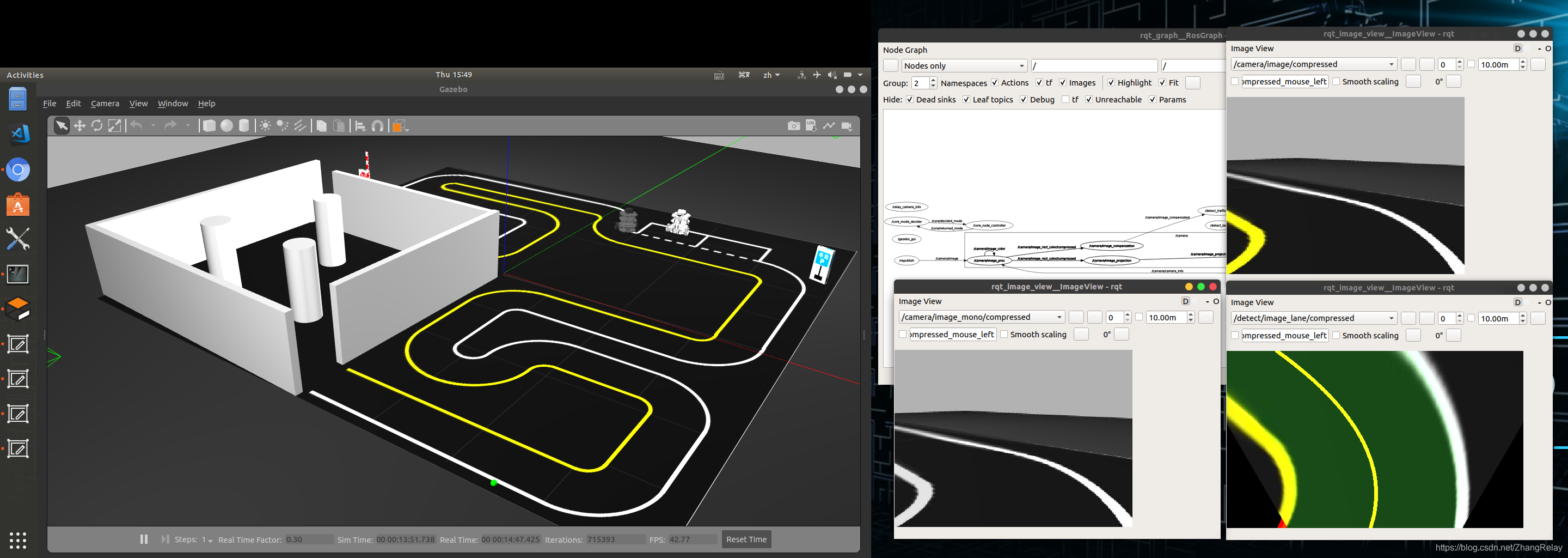
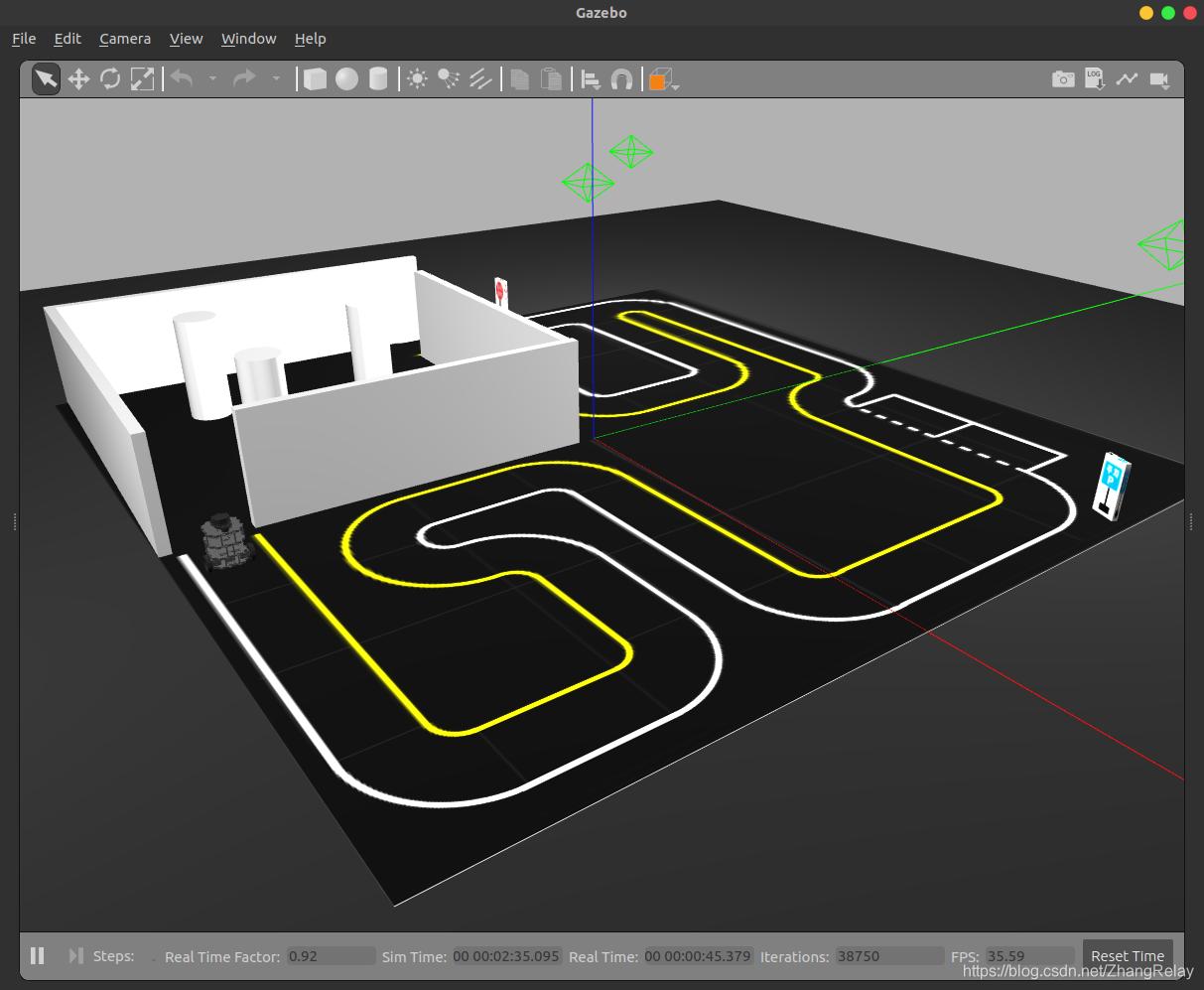
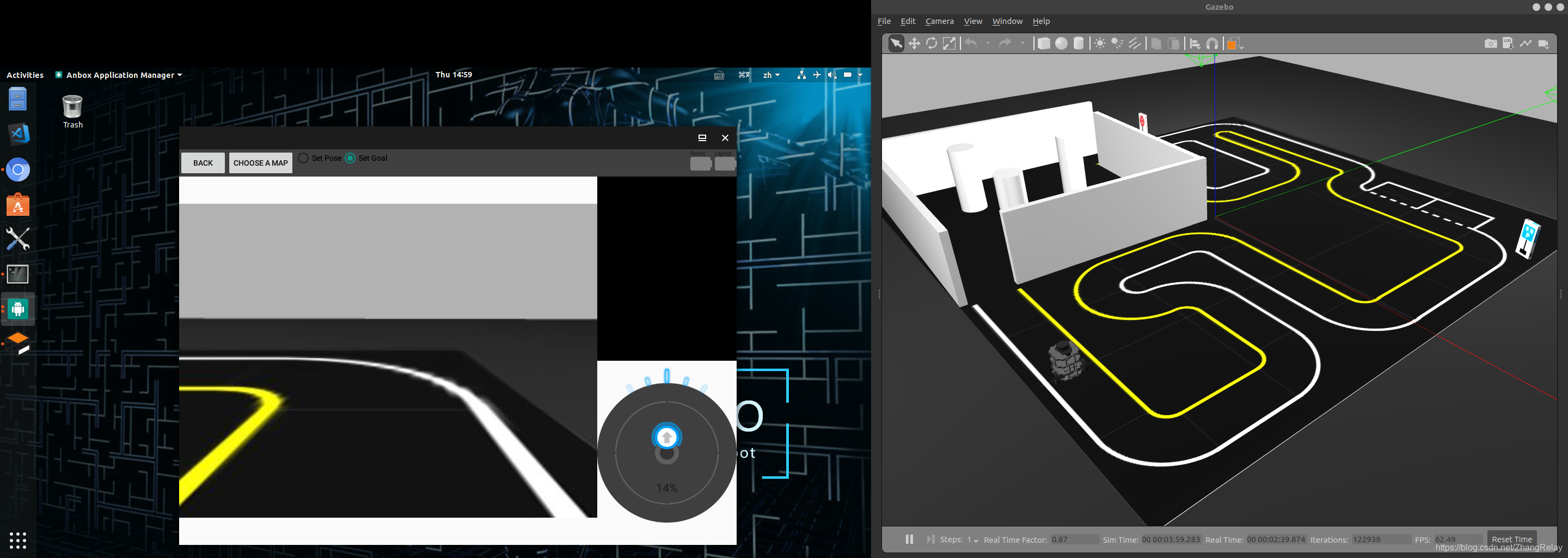
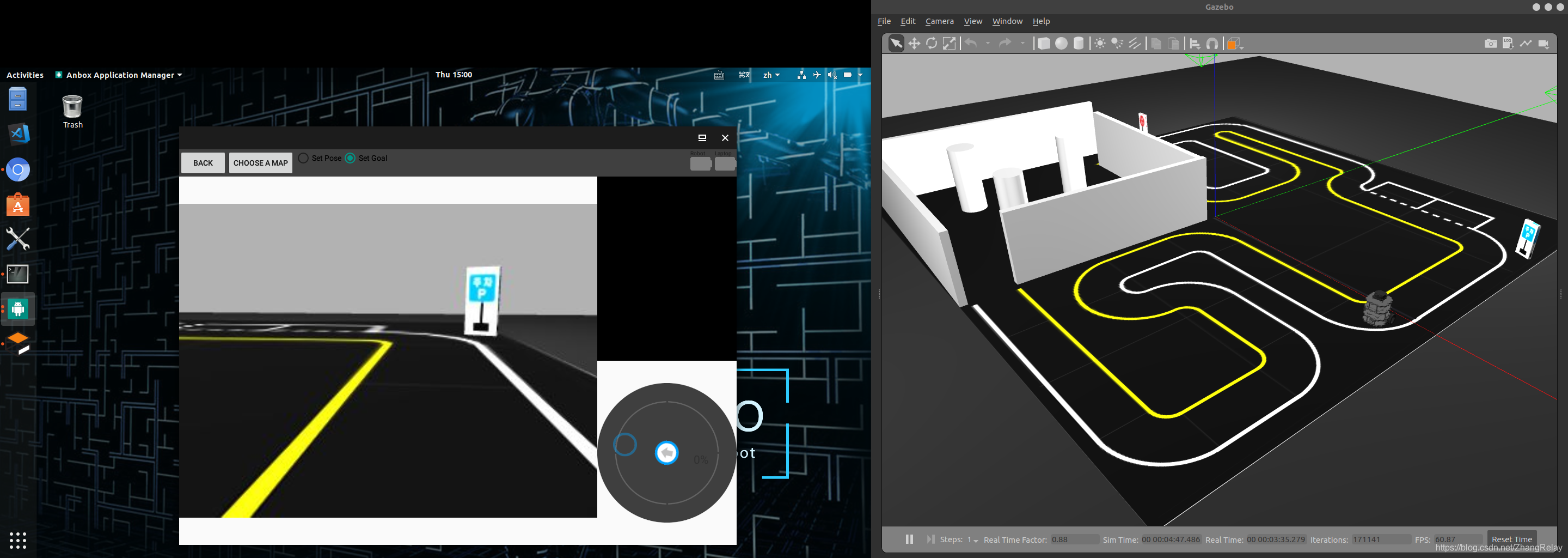
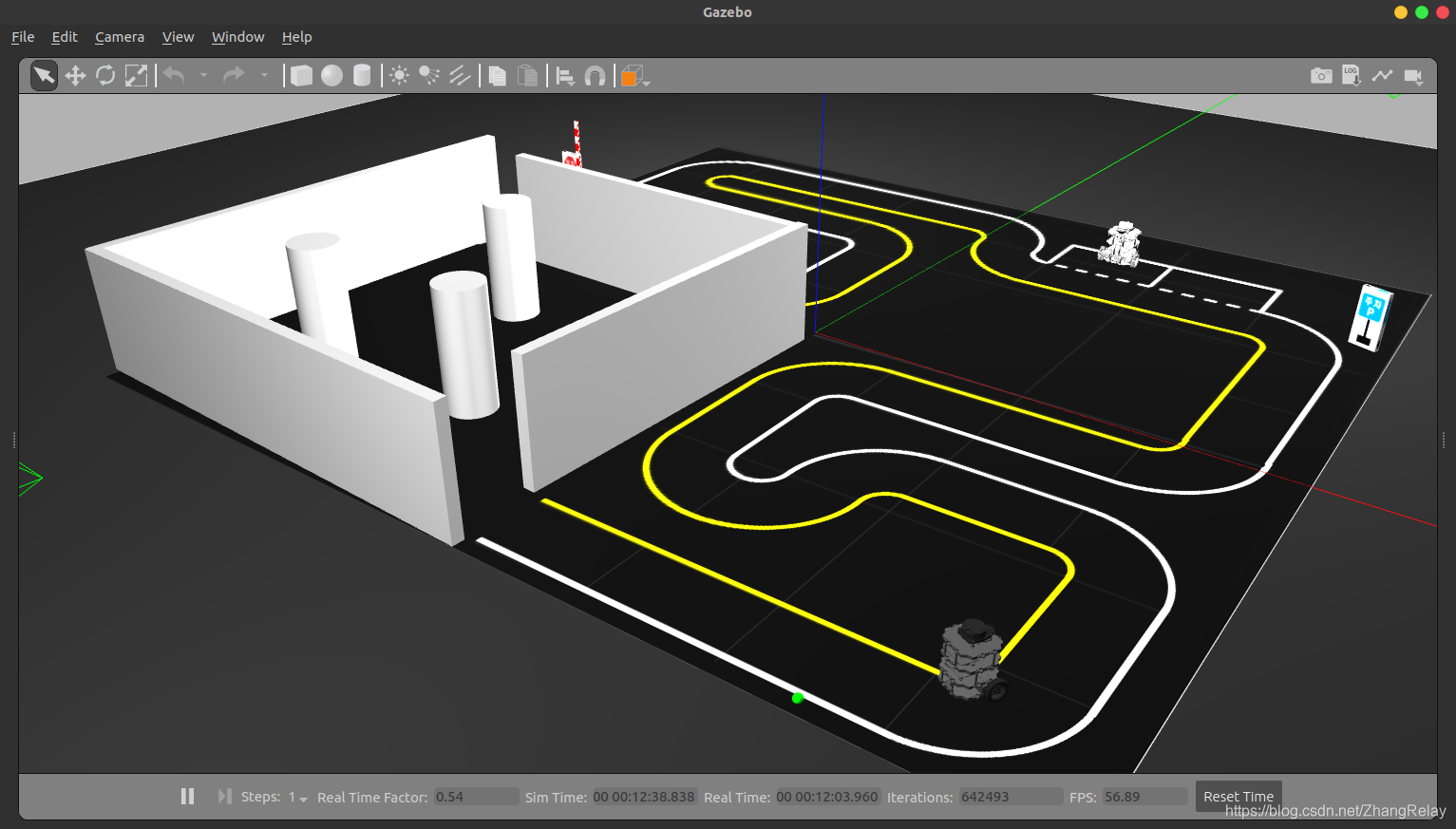
$ roslaunch turtlebot3_gazebo turtlebot3_autorace.launch
$ roslaunch turtlebot3_gazebo turtlebot3_autorace_mission.launch
tianbot@ros2go:~$ export GAZEBO_MODE=true
tianbot@ros2go:~$ export AUTO_IN_CALIB=action
tianbot@ros2go:~$ roslaunch turtlebot3_autorace_camera turtlebot3_autorace_intrinsic_camera_calibration.launch
tianbot@ros2go:~$ export AUTO_EX_CALIB=action
tianbot@ros2go:~$ export AUTO_DT_CALIB=action
tianbot@ros2go:~$ export TURTLEBOT3_MODEL=burger
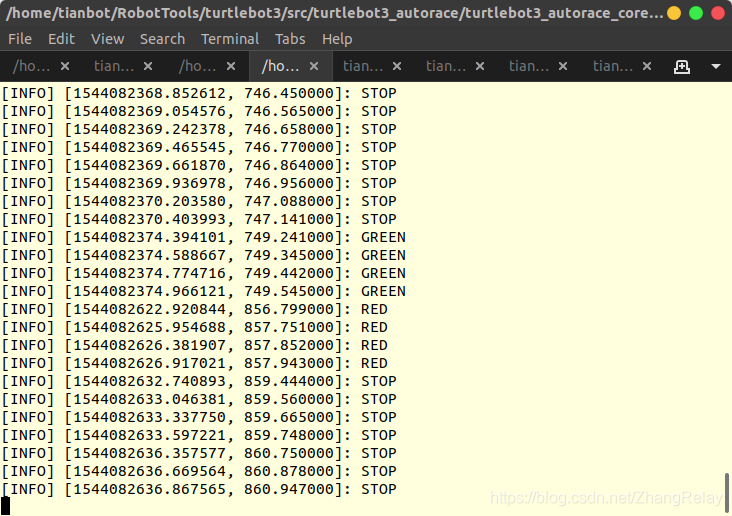
tianbot@ros2go:~$ roslaunch turtlebot3_autorace_core turtlebot3_autorace_core.launch
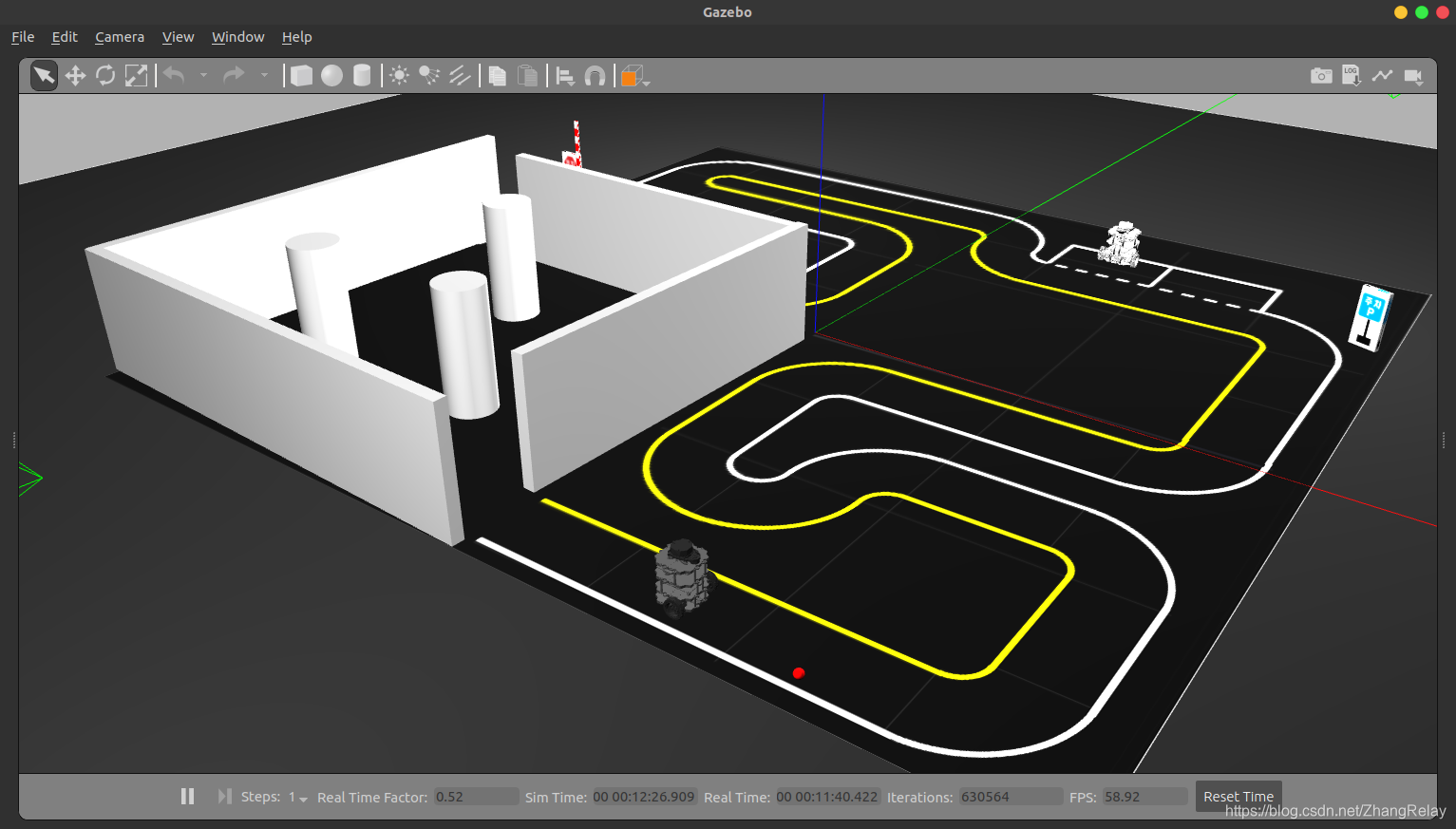
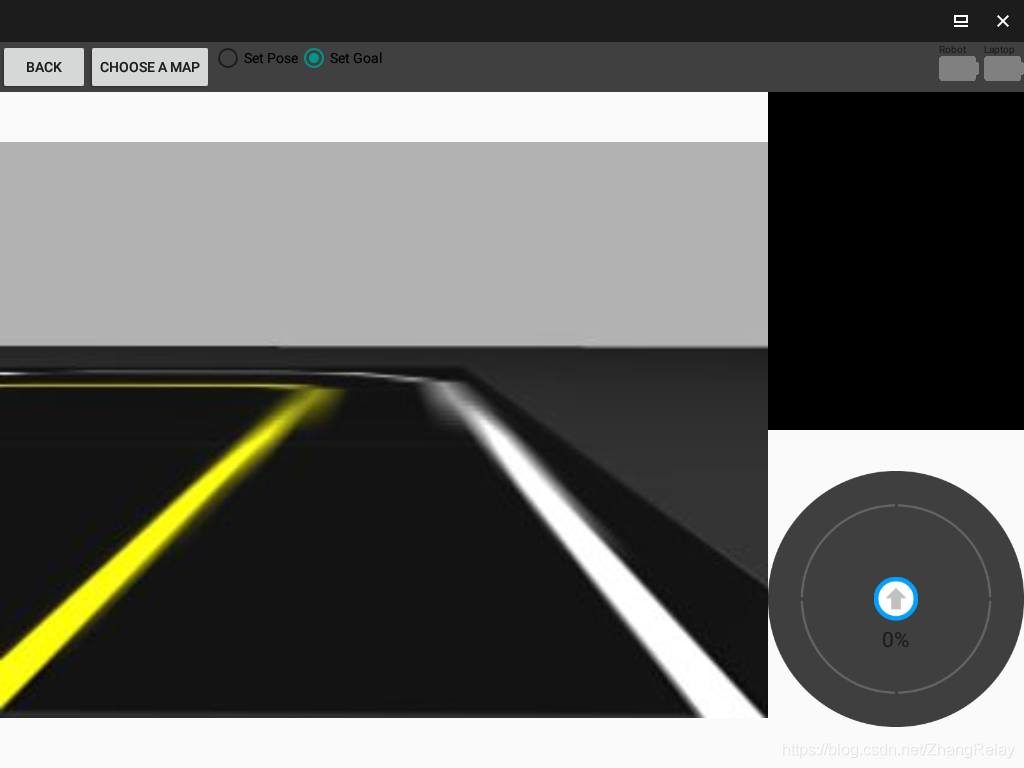
红灯停止,等待,绿灯通行。

----
Fin
----


















 1753
1753

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











