



 这篇教程介绍了如何在ROS2 (Dashing, Foxy, Galactic, Humble) 中结合OpenCV进行机器人导航和图像处理。内容包括基础的OpenCV图像处理、人脸识别以及使用DFS算法进行房间清洁机器人的路径规划。通过维护访问单元格的HashSet,确保机器人遍历所有可达区域并进行清洁。
这篇教程介绍了如何在ROS2 (Dashing, Foxy, Galactic, Humble) 中结合OpenCV进行机器人导航和图像处理。内容包括基础的OpenCV图像处理、人脸识别以及使用DFS算法进行房间清洁机器人的路径规划。通过维护访问单元格的HashSet,确保机器人遍历所有可达区域并进行清洁。
教程适用于Dashing以上版本,如foxy/galactic/humble。
2019年:
1. ROS2使用OpenCV基础_zhangrelay的博客-优快云博客
2. ROS2进行人脸识别face_recognition_zhangrelay的博客-优快云博客

2020-2021停更。
2022年:
1. ROS2+Gazebo11+Car+OpenCV巡线识别和速度转向控制学习
2. ROS2之OpenCV基础代码对比foxy~galactic~humble
3. ROS2之OpenCV人脸识别foxy~galactic~humble
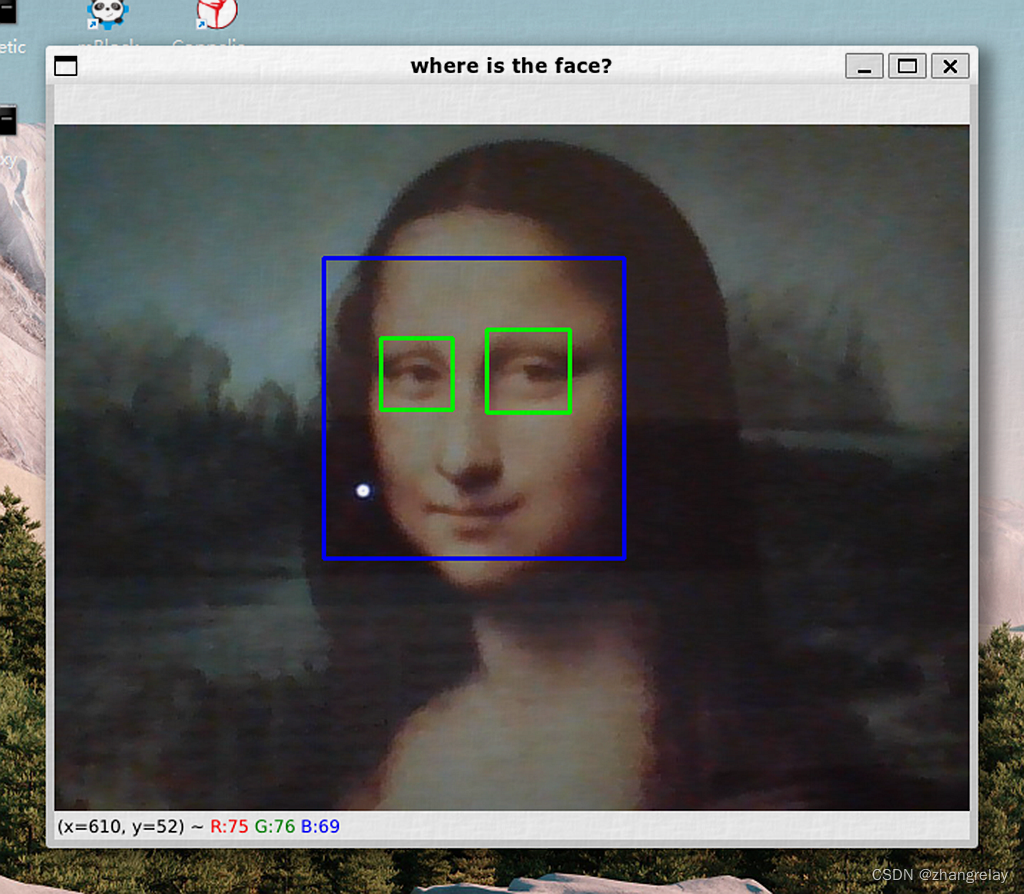
不变的永远是那谜一般微笑的蒙娜丽莎。
ROS2学习基础:
- 编程核心 C++和Python需要熟练掌握
- 算法核心 机器人学相关知识点
- ……
OpenCV学习基础:
- 数字图像处理相关知识点
- ……
推荐学习网站:
基础不牢,地动山摇。
数学和编程一定要强,强,强。
水一水,啥都学不会的^_^
比如如下清扫机器人编程案例题:
问题陈述
机器人房间清洁器解决方案—— “机器人房间清洁器”给出,在二维网格中给定机器人,其中 0 代表一堵墙, 1 代表一个自由空间。
机器人的初始位置保证为空,并且机器人使用给定的 API 在网格内移动 Robot。机器人必须清洁房间里的每个自由空间。
API机器人具有以下功能:
- boolean move():如果下一个单元格可以无障碍到达,则返回true,否则返回false。
- void turnLeft(): 左转
- void turnRight(): 右转
- function void clean():清理当前房间。
房间示意图:

房间数学简化模型:
room = [
[1,1,1,1,1,0,1,1],
[1,1,1,1,1,0,1,1],
[1,0,1,1,1,1,1,1],
[0,0,0,1,0,0,0,0],
[1,1,1,1,1,1,1,1]
]机器人位置(从0计数):
row = 1, col = 3简要说明:
- 房间中的所有网格都标记为 0 或 1。
- 0 表示该单元格被阻止,而 1 表示该单元格可访问。
- 机器人最初从位置 row = 1, col = 3 开始。
- 从左上角开始,它的位置是下面一排,右边三列。
提示:
- 解决这个问题的主要思想是使用 带有回溯的递归 。
- 从机器人的 API 和当前参考位置 (0,0) 开始。
- 此外,维护一个HashSet,用于存储相对于参考位置的访问单元格。
- 现在,对于每个位置,探索所有四个相邻的方向并检查机器人是否能够朝那个方向移动?
- 此外,检查新坐标是否必须未被访问。
- 如果以上几点为真,则探索新坐标。
- 此外,要返回到具有相同方向的机器人的同一个单元格,将向右转动机器人两次,然后移动到前一个单元格,然后再向右两次以存储之前的方向。
- 上述程序,自机器人访问每个房间以来,清洁所有自由空间。
参考C++程序:
class Solution {
public:
set<array<int,3>> vis;
void dfs(int x,int y,int dir,Robot& robot){
robot.clean();
for(int d=0;d<4;d++){
int new_dir = (dir+d)%4;
if(new_dir==0 and !vis.count({x-1,y,new_dir}) and robot.move()){
vis.insert({x-1,y,new_dir});
dfs(x-1,y,new_dir,robot);
}
if(new_dir==1 and !vis.count({x,y+1,new_dir}) and robot.move()){
vis.insert({x,y+1,new_dir});
dfs(x,y+1,new_dir,robot);
}
if(new_dir==2 and !vis.count({x+1,y,new_dir}) and robot.move()){
vis.insert({x+1,y,new_dir});
dfs(x+1,y,new_dir,robot);
}
if(new_dir==3 and !vis.count({x,y-1,new_dir}) and robot.move()){
vis.insert({x,y-1,new_dir});
dfs(x,y-1,new_dir,robot);
}
robot.turnRight();
}
robot.turnRight();
robot.turnRight();
robot.move();
robot.turnRight();
robot.turnRight();
}
void cleanRoom(Robot& robot) {
dfs(0,0,0,robot);
}
};


















 2609
2609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











