



 该博客详细介绍了基于ROS2的机器人系统配置和实验步骤,包括使用foxy和galactic版本的ROS2,涉及到的实验内容涵盖robot_state_publisher、joint_state_publisher、rviz2、gazebo模拟以及导航堆栈等。提供了相应的launch文件示例,用于启动机器人描述、状态发布、rviz配置、地图构建和定位等。建议观看直播回放并按照文档自行实践以掌握ROS2基础操作。
该博客详细介绍了基于ROS2的机器人系统配置和实验步骤,包括使用foxy和galactic版本的ROS2,涉及到的实验内容涵盖robot_state_publisher、joint_state_publisher、rviz2、gazebo模拟以及导航堆栈等。提供了相应的launch文件示例,用于启动机器人描述、状态发布、rviz配置、地图构建和定位等。建议观看直播回放并按照文档自行实践以掌握ROS2基础操作。
ROS2基础部分实验内容详细描述分别在前3次提示中。涉及文档如下所示:
本节开始,主要涉及文档如下图所示:
如果不熟悉,请看直播回放,并且依据回放中的方法进行练习,注意直播时ROS2版本为foxy,镜像中是 galactic。
本节涉及代码在如下文件夹:
参考:
所有代码都已调试通过,但最好按文档自学一遍,这样才能掌握。
测试案例:
. install/setup.bash
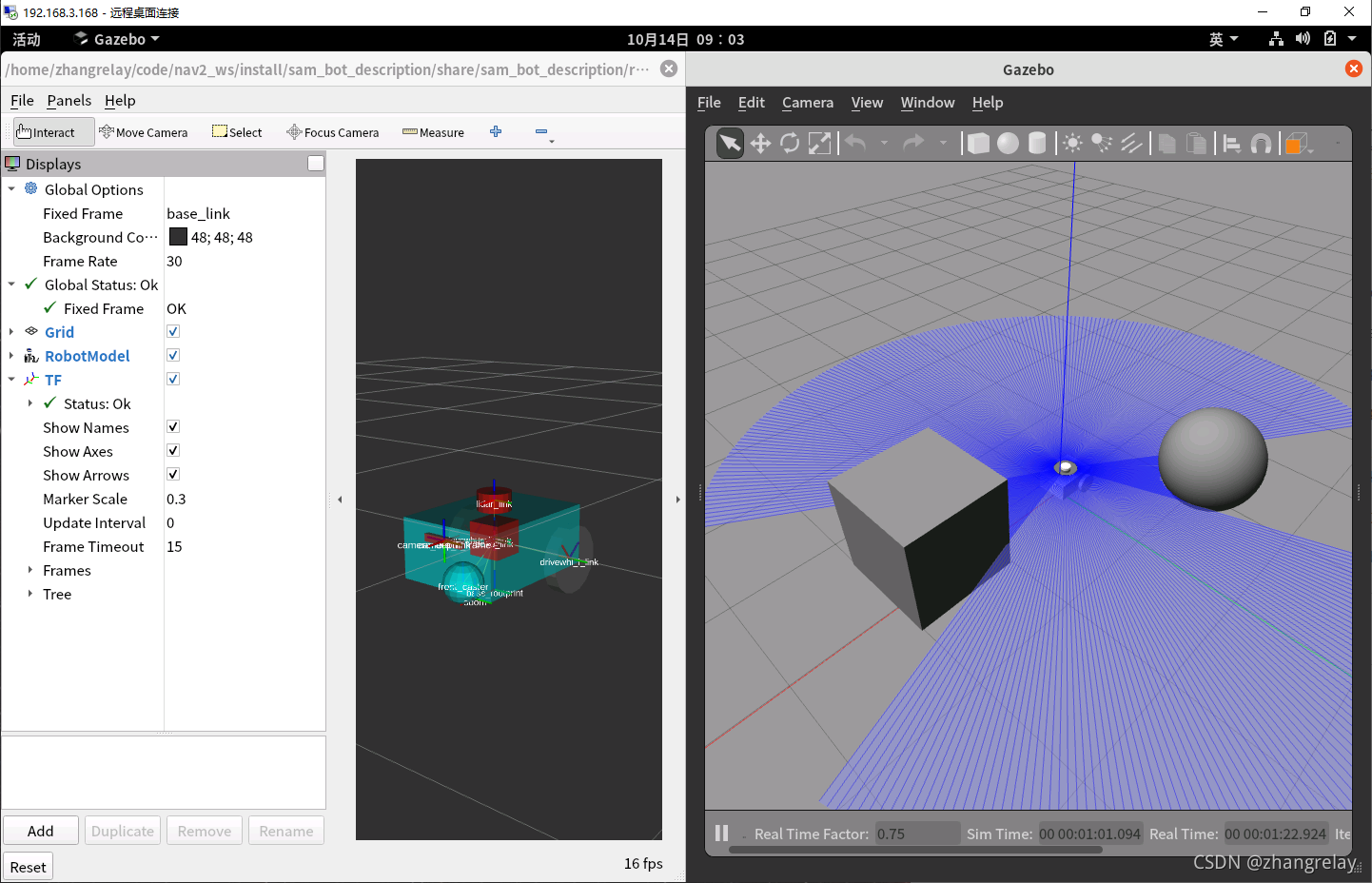
ros2 launch sam_bot_description display.launch.py
ros2 launch slam_toolbox online_async_launch.py
ros2 run tf2_tools view_frames.py
ros2 launch nav2_bringup navigation_launch.py
ros2 run nav2_costmap_2d nav2_costmap_2d_markers voxel_grid:=/local_costmap/voxel_grid visualization_marker:=/my_marker
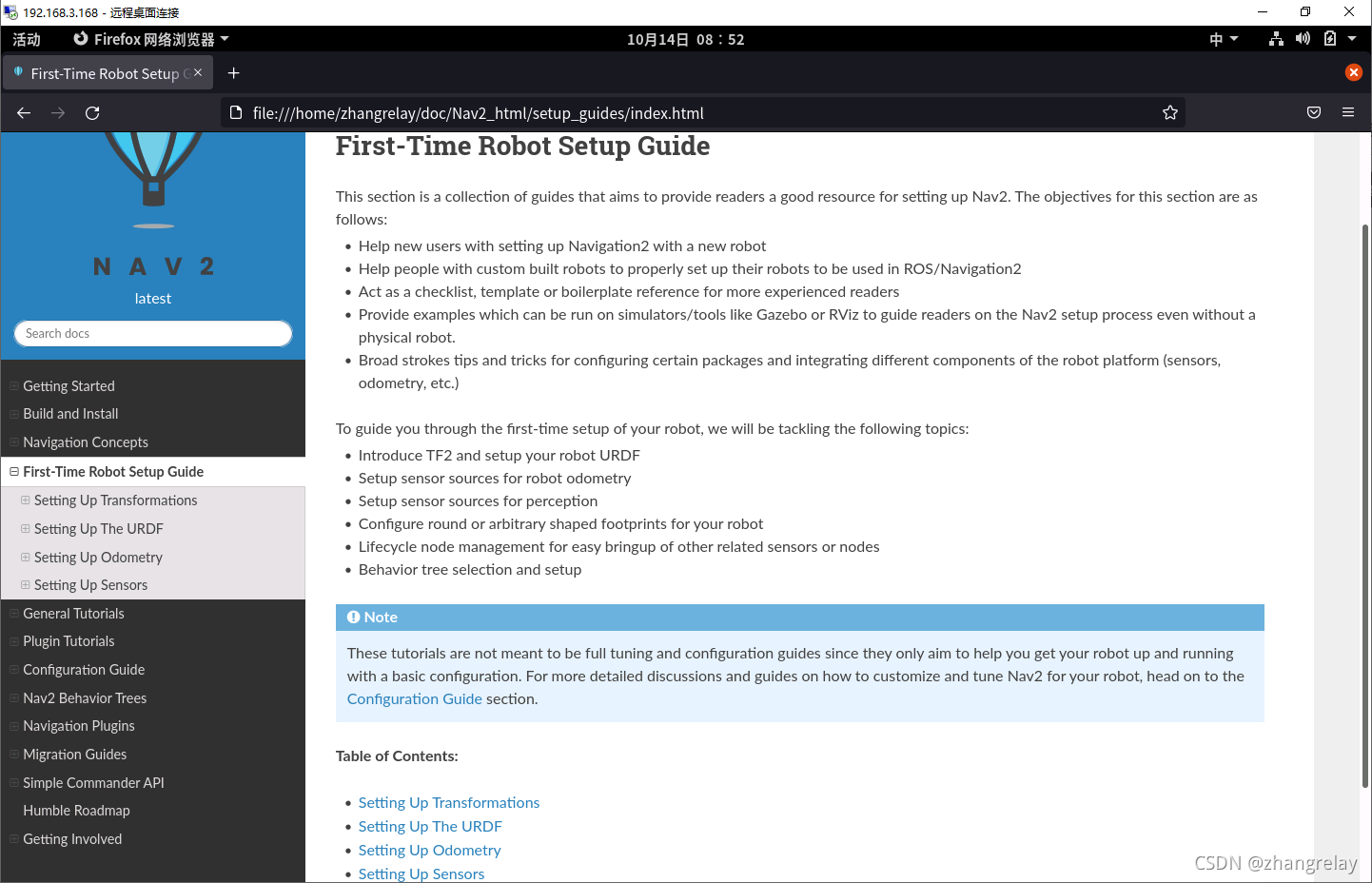
本部分详细介绍参考钉钉直播回放和
Nav2官方教程➡First-Time Robot Setup Guide⬅搞不定
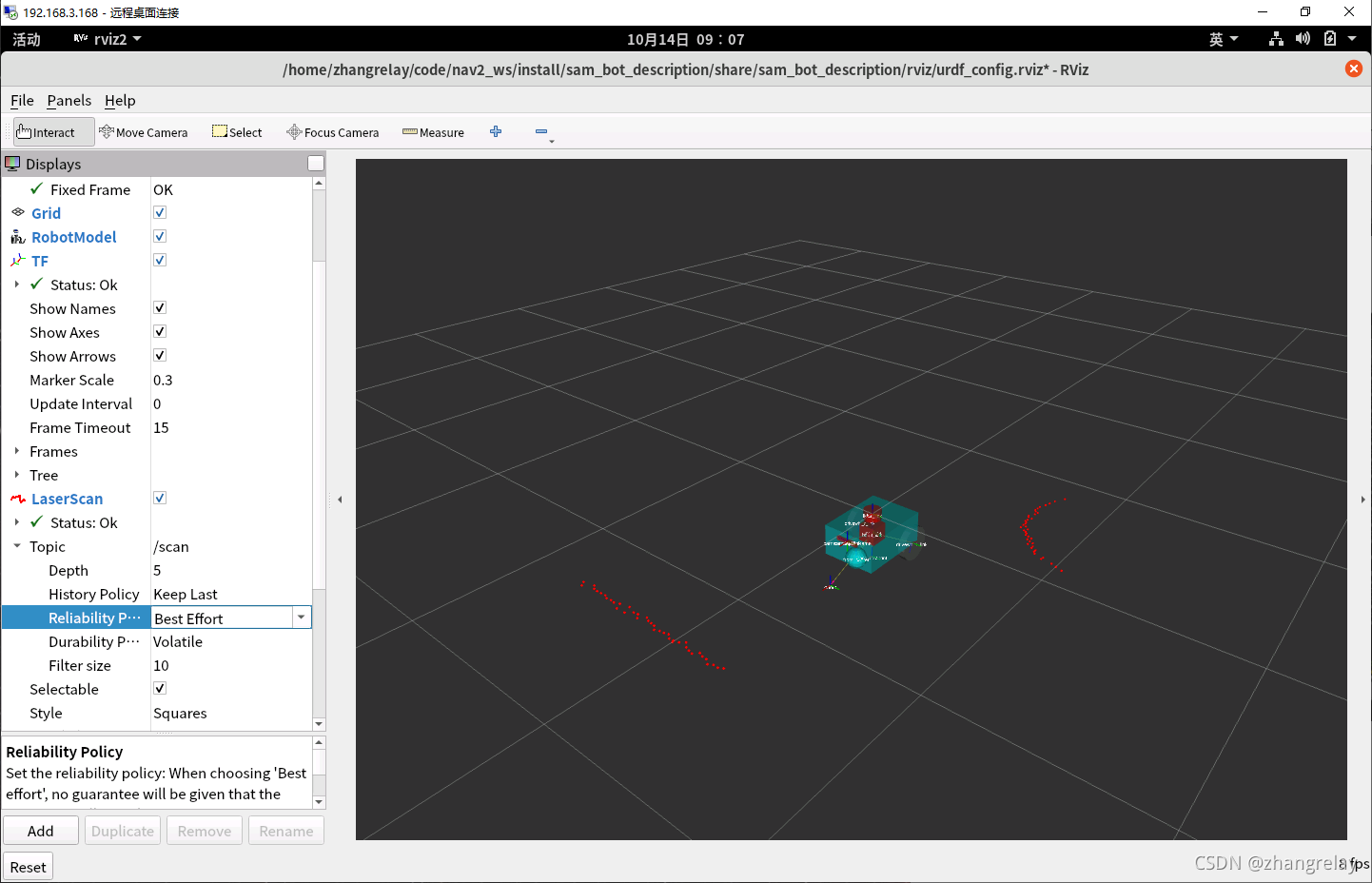
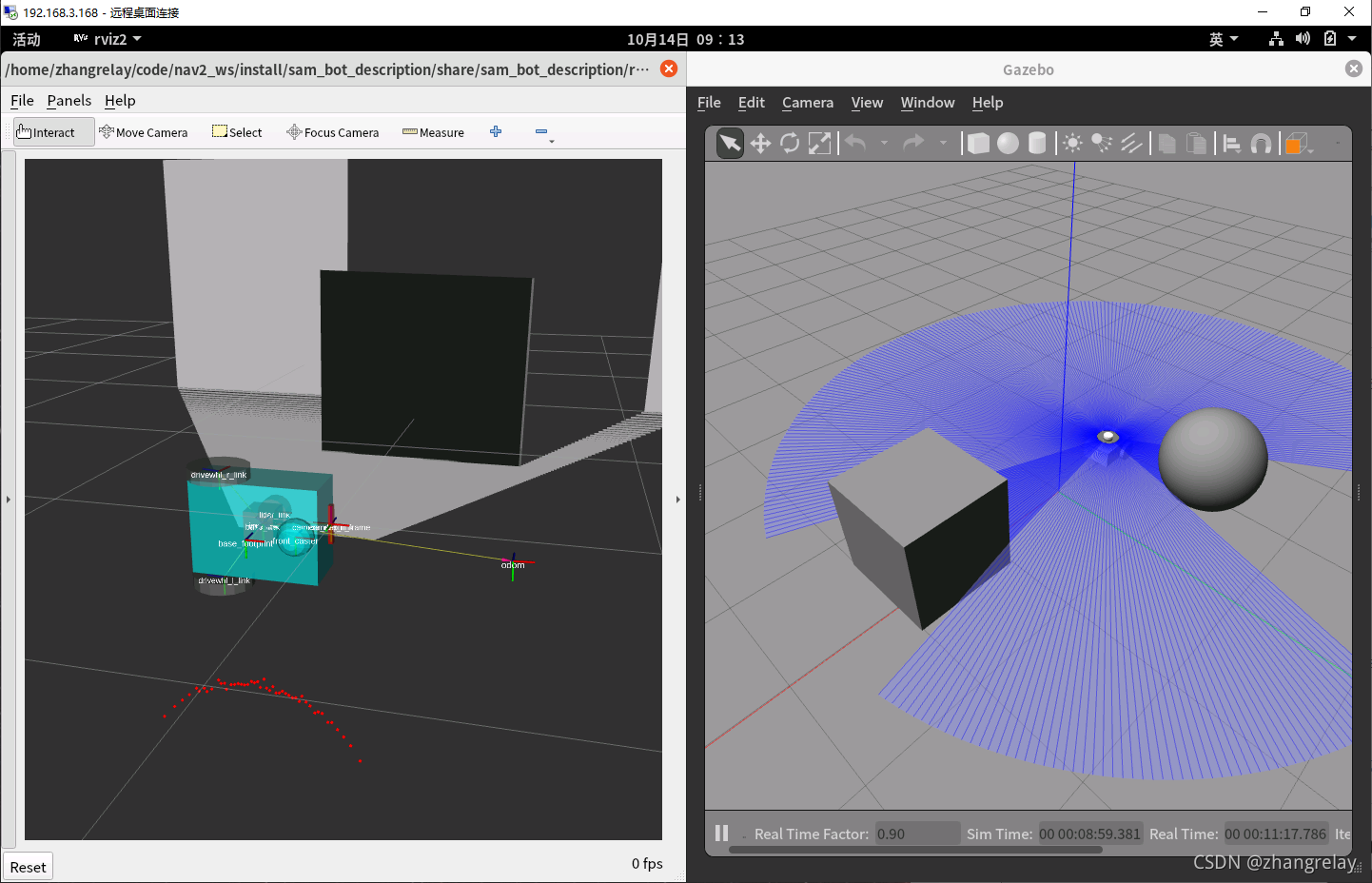
添加激光主题查看效果。
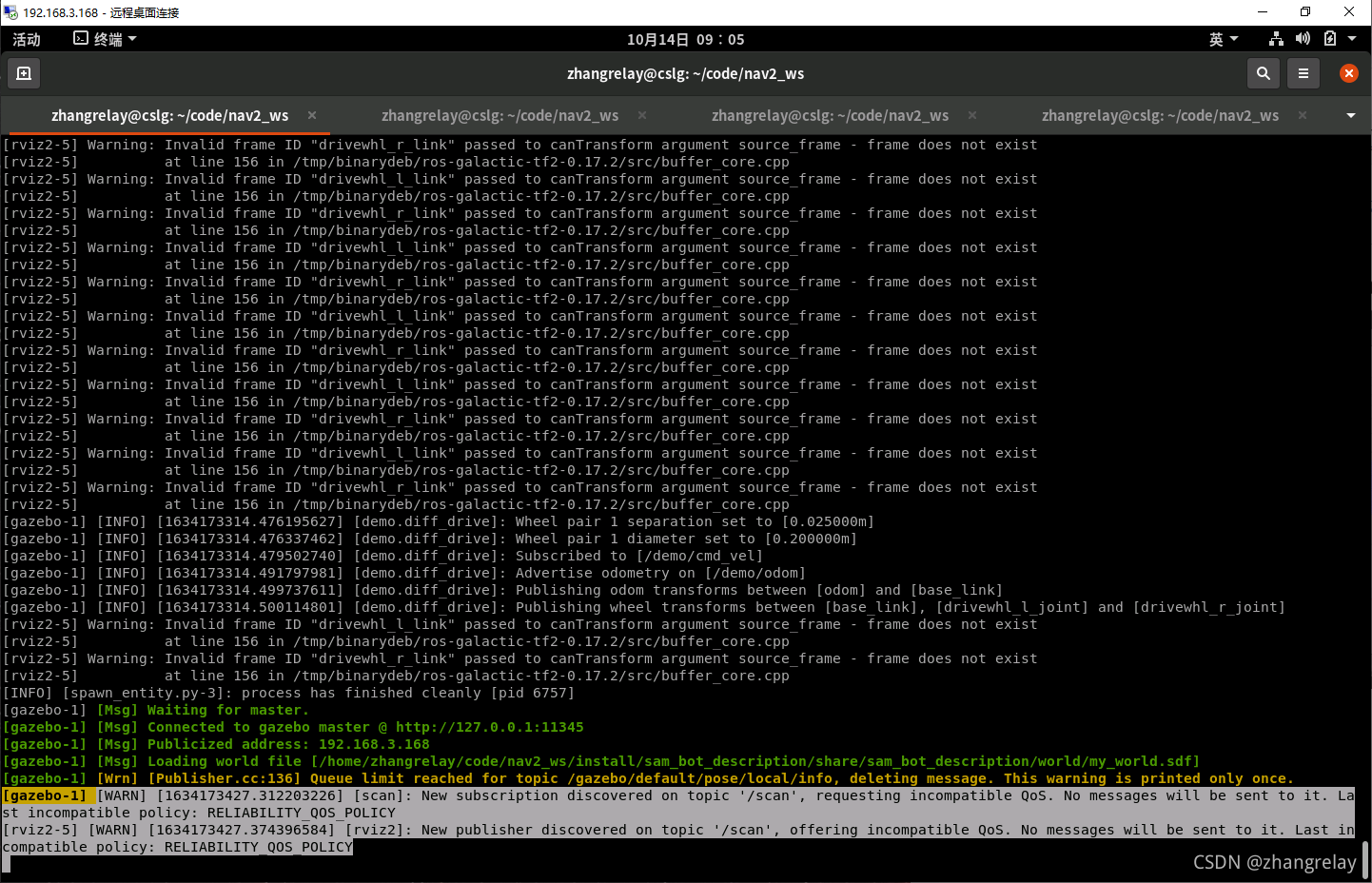
修改一下:
如遇到问题独立思考。
自主完成实验。
import launch
from launch.substitutions import Command, LaunchConfiguration
import launch_ros
import os
def generate_launch_description():
pkg_share = launch_ros.substitutions.FindPackageShare(package='sam_bot_description').find('sam_bot_description')
default_model_path = os.path.join(pkg_share, 'src/description/sam_bot_description.urdf')
default_rviz_config_path = os.path.join(pkg_share, 'rviz/urdf_config.rviz')
world_path=os.path.join(pkg_share, 'world/my_world.sdf')
robot_state_publisher_node = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': Command(['xacro ', LaunchConfiguration('model')])}]
)
joint_state_publisher_node = launch_ros.actions.Node(
package='joint_state_publisher',
executable='joint_state_publisher',
name='joint_state_publisher',
condition=launch.conditions.UnlessCondition(LaunchConfiguration('gui'))
)
rviz_node = launch_ros.actions.Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
arguments=['-d', LaunchConfiguration('rvizconfig')],
)
spawn_entity = launch_ros.actions.Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', 'sam_bot', '-topic', 'robot_description'],
output='screen'
)
robot_localization_node = launch_ros.actions.Node(
package='robot_localization',
executable='ekf_node',
name='ekf_filter_node',
output='screen',
parameters=[os.path.join(pkg_share, 'config/ekf.yaml'), {'use_sim_time': LaunchConfiguration('use_sim_time')}]
)
return launch.LaunchDescription([
launch.actions.DeclareLaunchArgument(name='gui', default_value='True',
description='Flag to enable joint_state_publisher_gui'),
launch.actions.DeclareLaunchArgument(name='model', default_value=default_model_path,
description='Absolute path to robot urdf file'),
launch.actions.DeclareLaunchArgument(name='rvizconfig', default_value=default_rviz_config_path,
description='Absolute path to rviz config file'),
launch.actions.DeclareLaunchArgument(name='use_sim_time', default_value='True',
description='Flag to enable use_sim_time'),
launch.actions.ExecuteProcess(cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so', world_path], output='screen'),
joint_state_publisher_node,
robot_state_publisher_node,
spawn_entity,
robot_localization_node,
rviz_node
])


















 2681
2681

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











