



 本文探讨了在移动设备上调试ROS2遇到的问题,重点聚焦于DDS通信,介绍了micro-ROS2在机器人控制中的优势,以及微控制器与手机平台的区别。还提到了技术迭代如webots替代Gazebo,以及微软Hololens2的应用。通过实例和趣图,展示了ROS0Mobile的源码使用情况。
本文探讨了在移动设备上调试ROS2遇到的问题,重点聚焦于DDS通信,介绍了micro-ROS2在机器人控制中的优势,以及微控制器与手机平台的区别。还提到了技术迭代如webots替代Gazebo,以及微软Hololens2的应用。通过实例和趣图,展示了ROS0Mobile的源码使用情况。
近期在移动设备(如手机)调试ROS较多,当然相关测试工作早就开始,但是水平和时间有限,bug多。
一些案例截图如下:
还有:

当然DDS也可以直接运行于Android设备上。
核心点位是DDS,如果掌握了,对ROS2的通信也就没啥疑惑了。
- ROS2E版终结
- micro-ROS2逐步成熟,微控制器与手机不同
- 任务管理支持机器人,有腿足,阿克曼模型,差动运动,全方位
- SLAM涵盖:二维,三维,视觉和GPS等
- ROS2D版更新很少,也走向尾声
- ROS2 DDS和VPN
- 微软windows即将支持Ignition Gazebo仿真
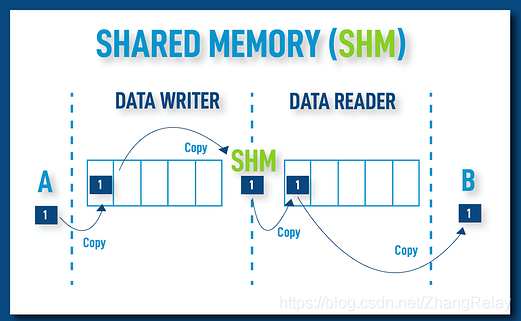
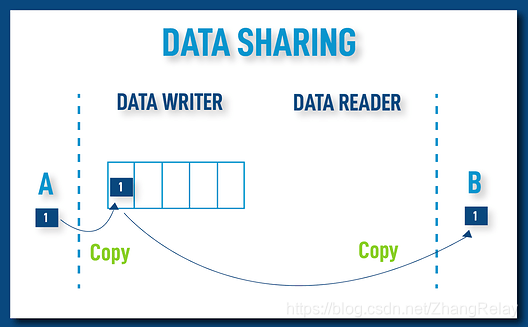
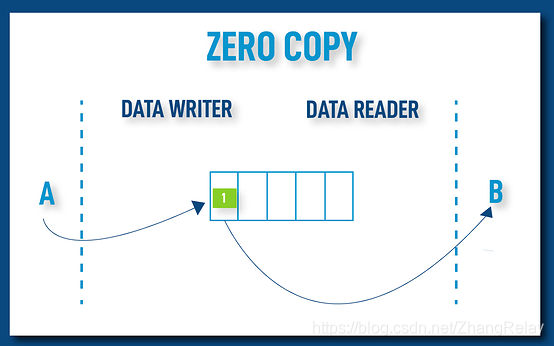
- DDS--共享内存到零拷贝
Q萌

教程不用Gazebo了,换了webots,等Ignition成熟后放出相关课程。
为何?官宣淘汰了啊!!!
嗯,机器人专业学习,不是考古,要是对老旧古技术有痴迷狂热,请继续ROS1学习和研究。
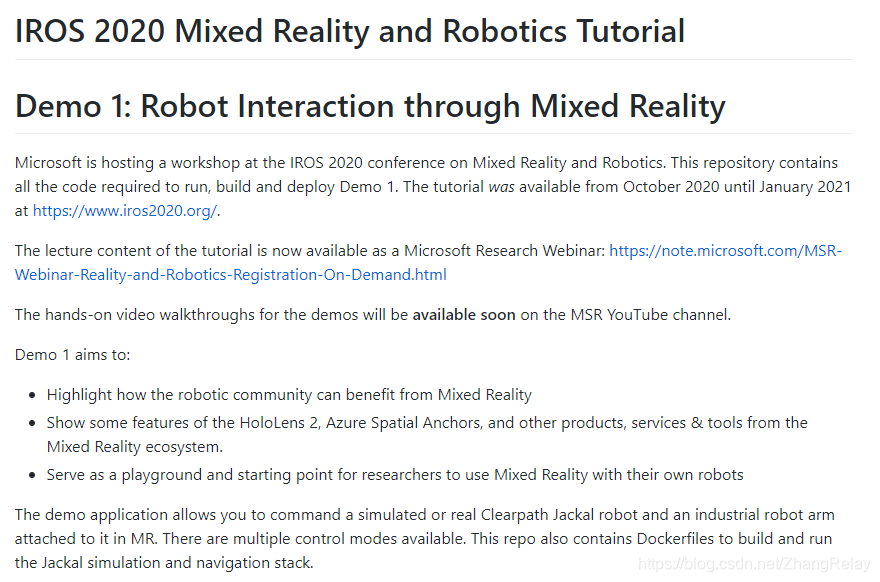
微软Hololens2!
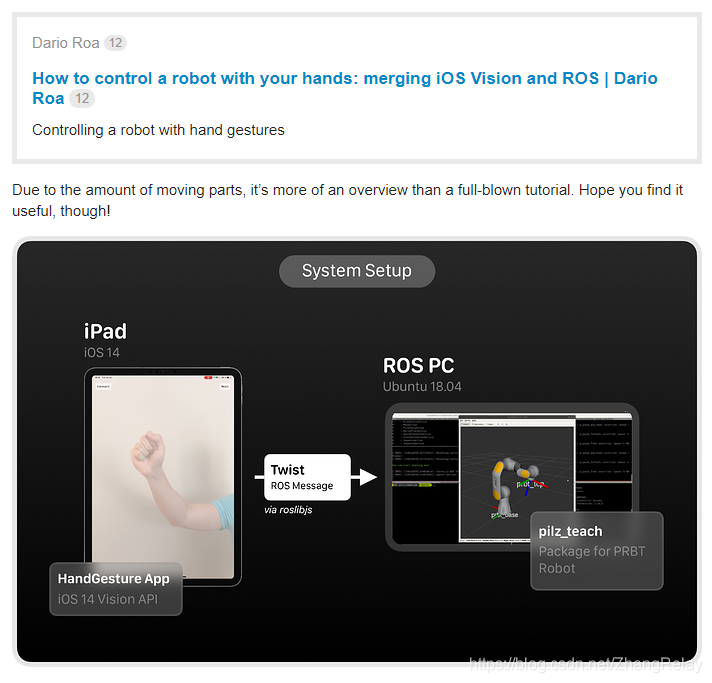
很赞的一个ROS0Mobile(含源码):

趣图一组:
^_^



















 4297
4297

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











