



官方和Github没有给出ESP8266与ROS2的连接方式,只有ROS1。
ESP8266与ROS2连接与ESP32几乎一致,但是由于资源有限,无线并不稳定,串口正常,具体参考:
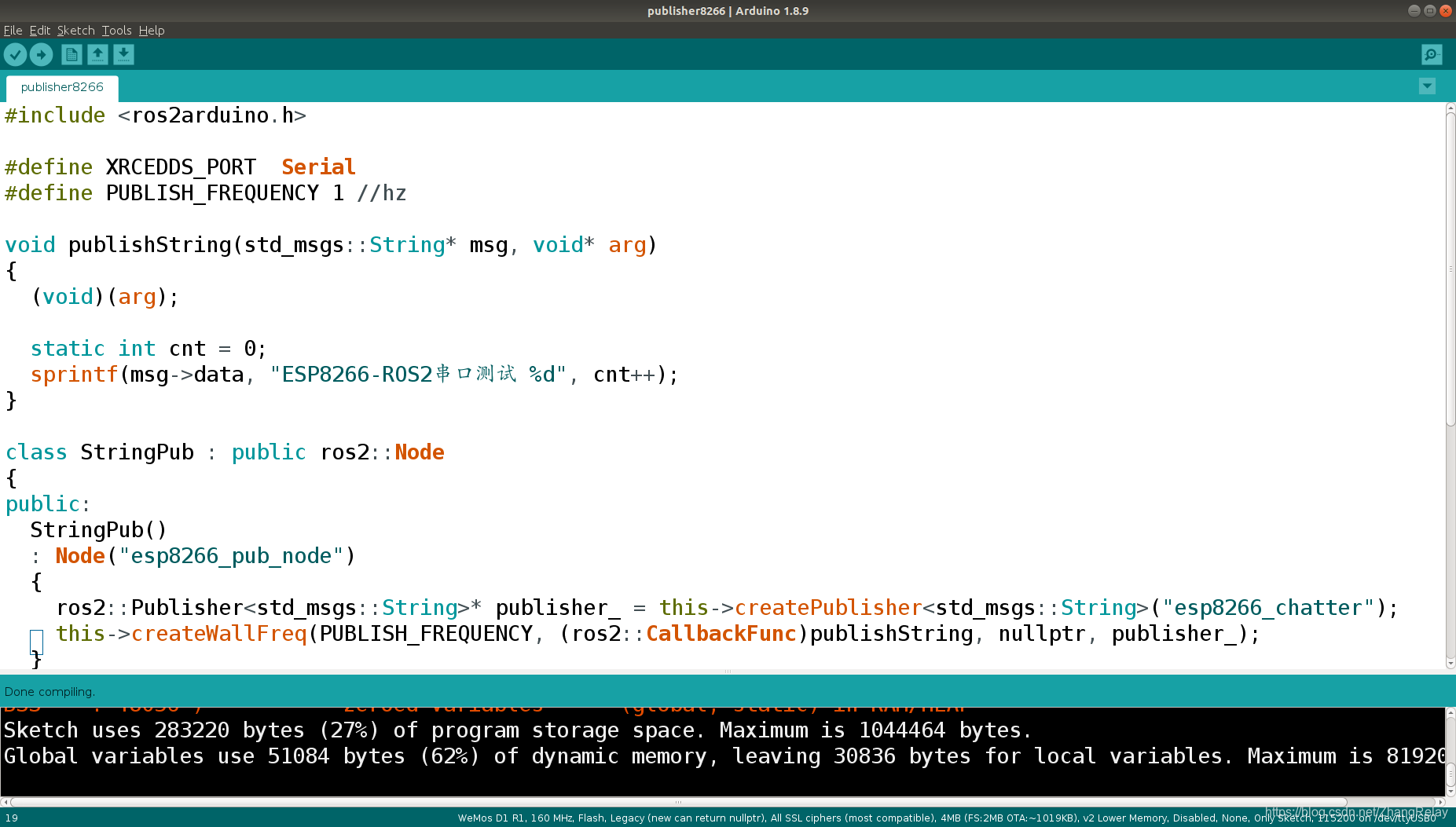
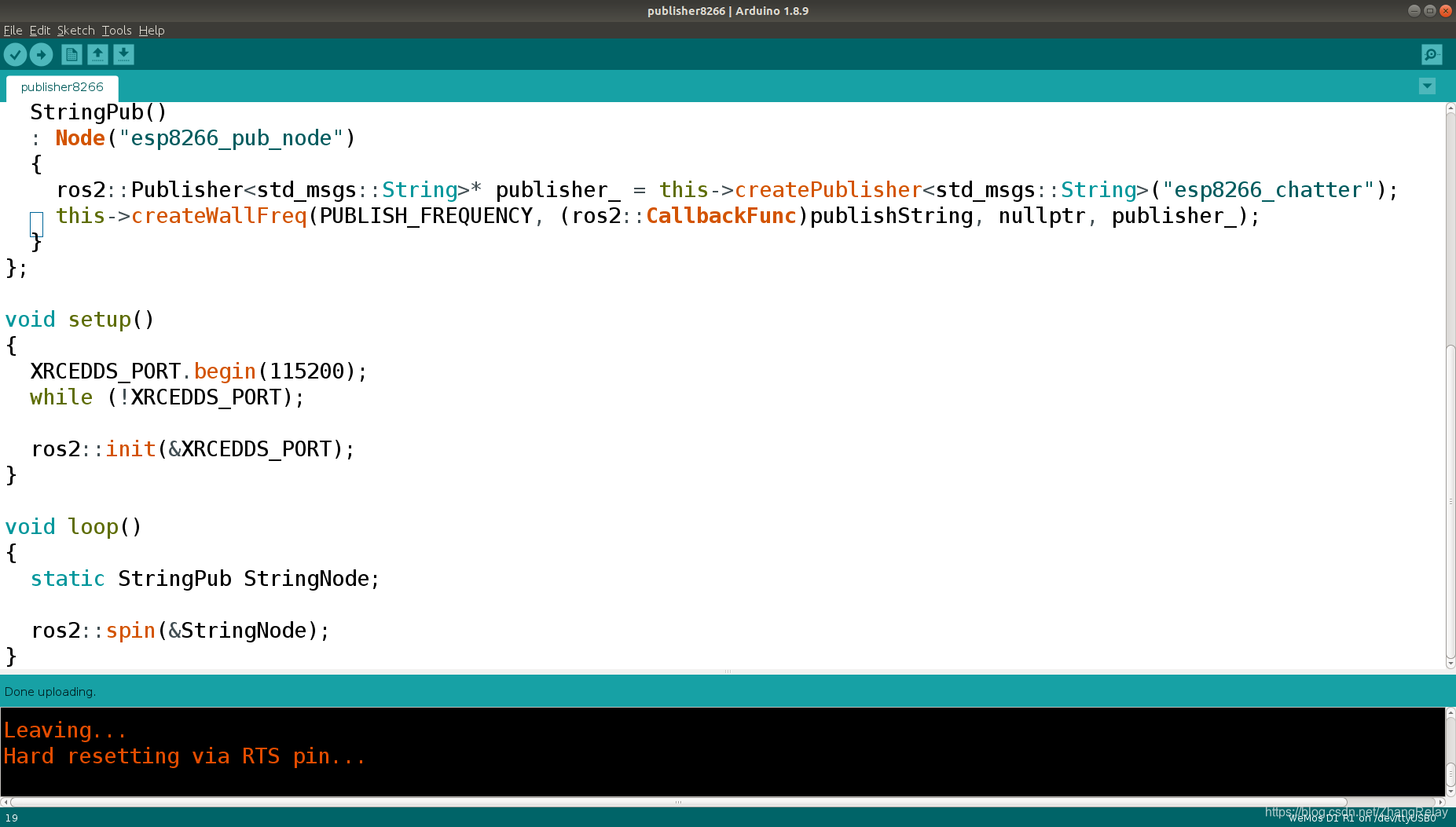
部分测试结果如下,修改代码如图所示:
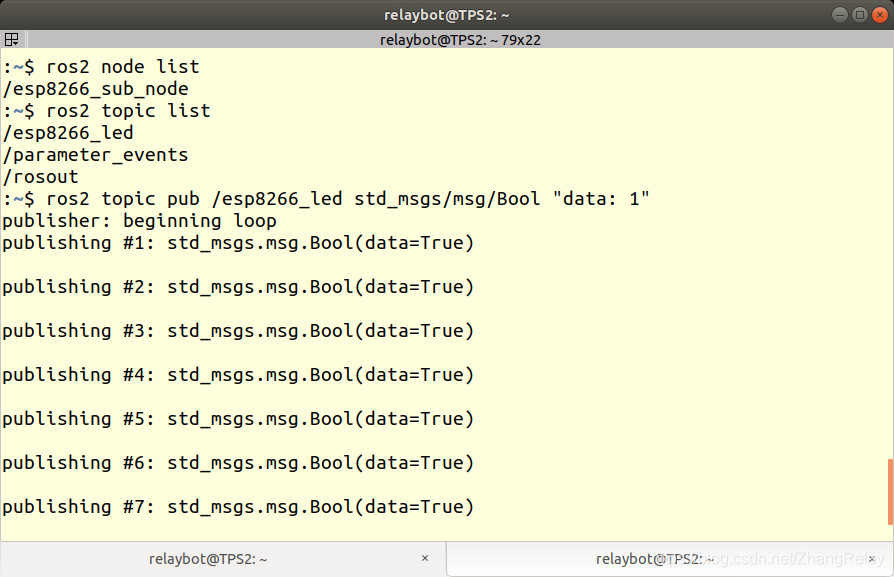
发布---
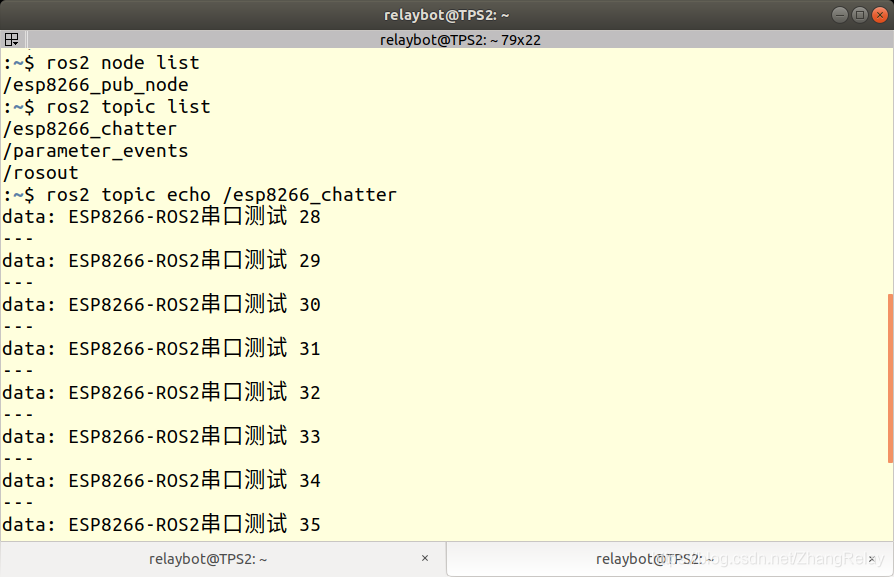
终端测试效果:
使用wifi测试:
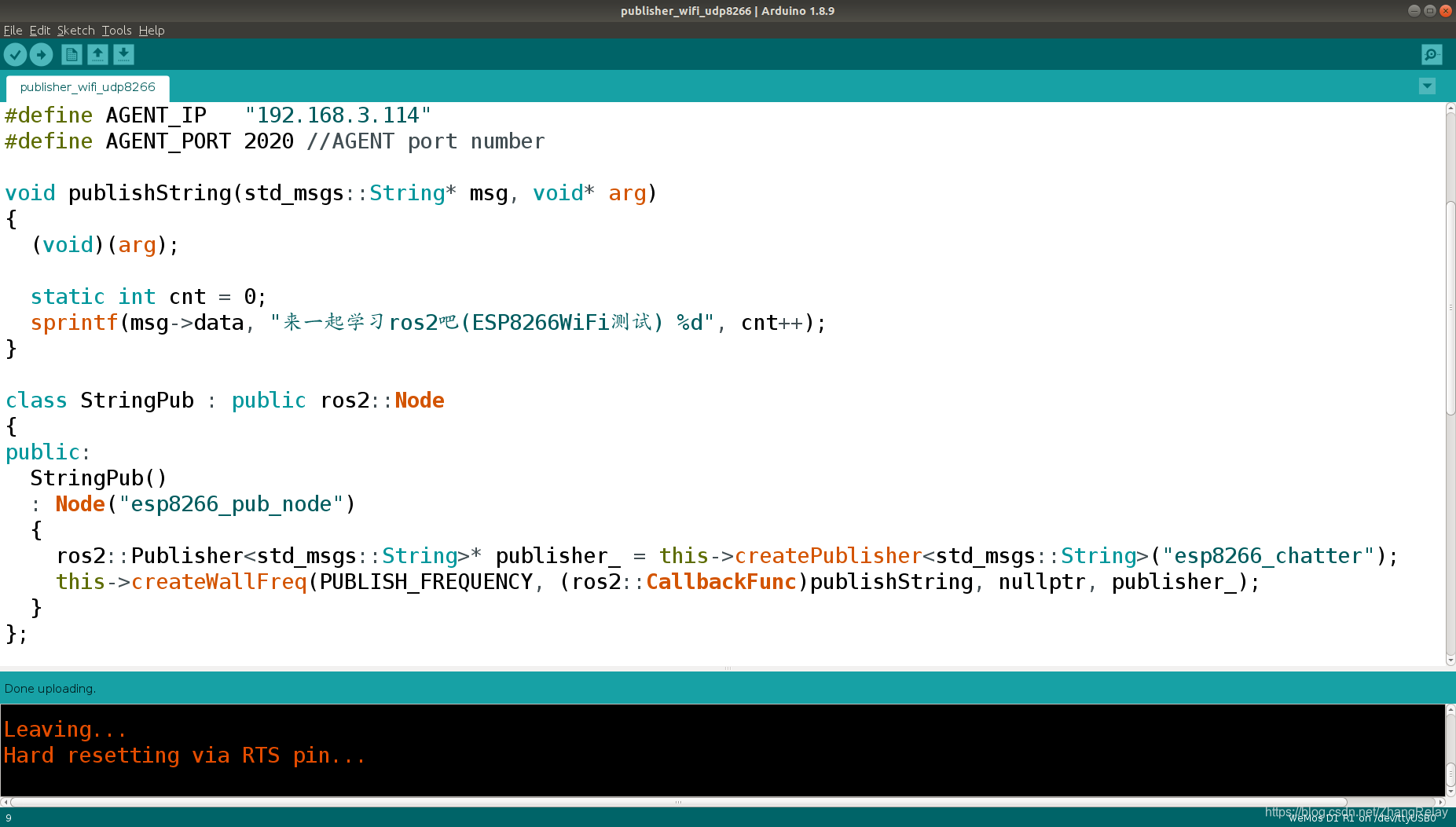
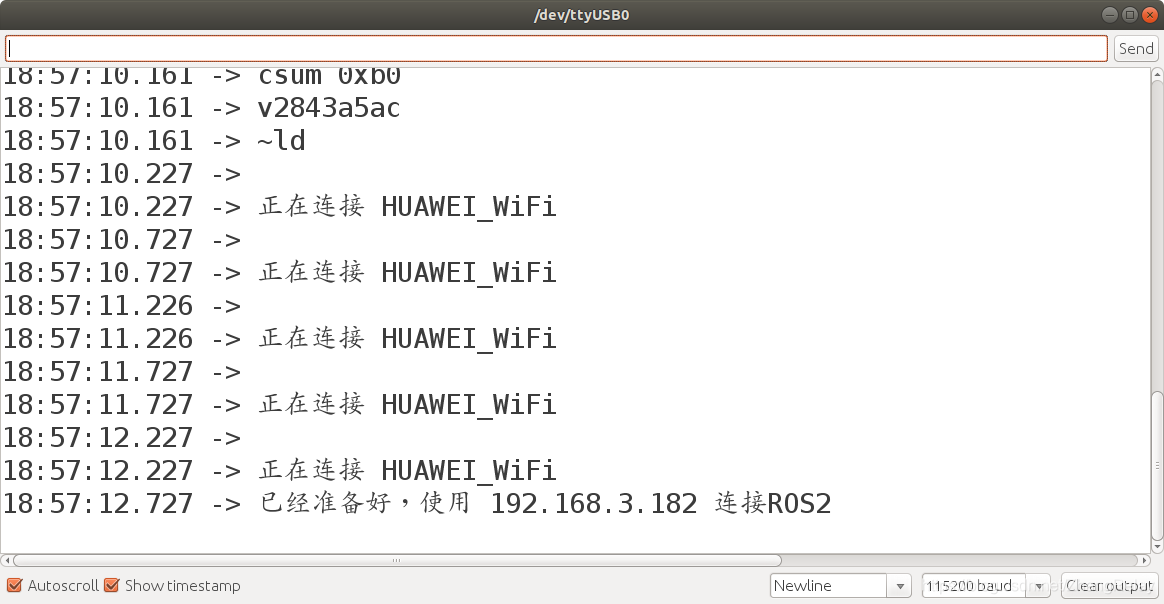
系统会重置,不稳定。
接收---
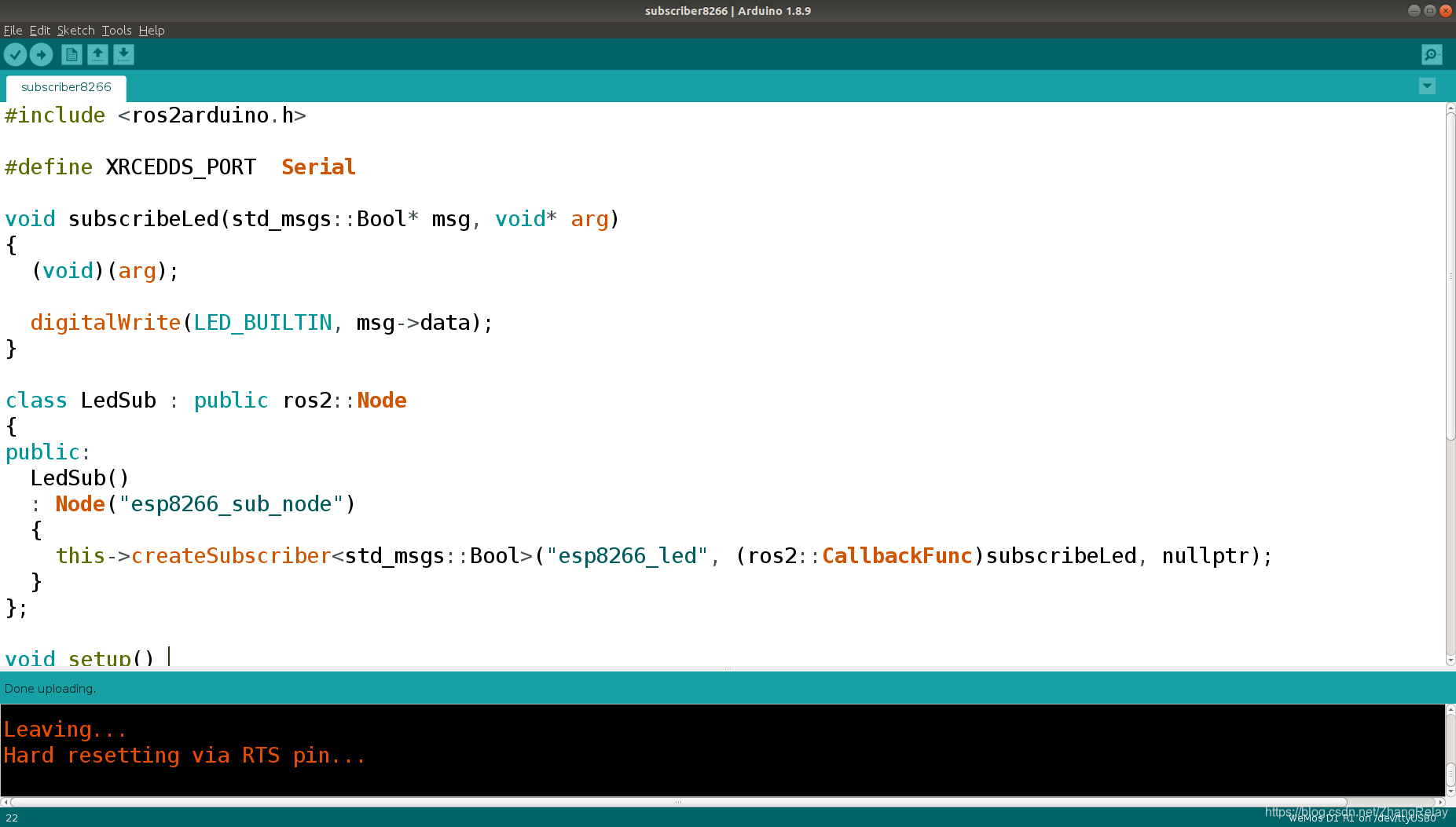
通过接收,点亮或关闭LED:
具体代码和实现内容均与ESP32一致。
官方和Github没有给出ESP8266与ROS2的连接方式,只有ROS1。
ESP8266与ROS2连接与ESP32几乎一致,但是由于资源有限,无线并不稳定,串口正常,具体参考:
部分测试结果如下,修改代码如图所示:
发布---
终端测试效果:
使用wifi测试:
系统会重置,不稳定。
接收---
通过接收,点亮或关闭LED:
具体代码和实现内容均与ESP32一致。
 1771
3518
1771
3518

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























