



一、本人使用环境
ubuntu20.04,显卡驱动版本535,CUDA版本12.2
二、创建虚拟环境并安装python库
1.创建环境
作者安装过程中使用过python3.7但是在最后安装库的时候存在冲突,最后实测python3.8可用
conda create -n pp python=3.8conda activate pp2.安装pytorch
以下是pytorch官网网址PyTorch,往下翻找到这个界面。
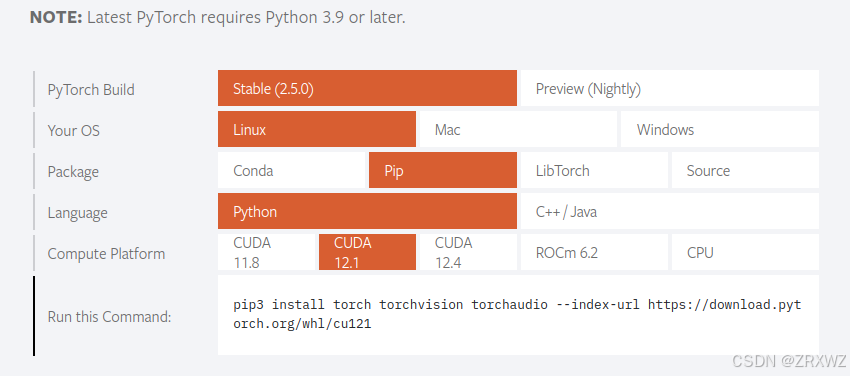
选择适合自己系统环境的版本,安装。
3.安装spconv
这个也是依赖于cuda版本来安装,进入这个github网址GitHub - traveller59/spconv: Spatial Sparse Convolution Library
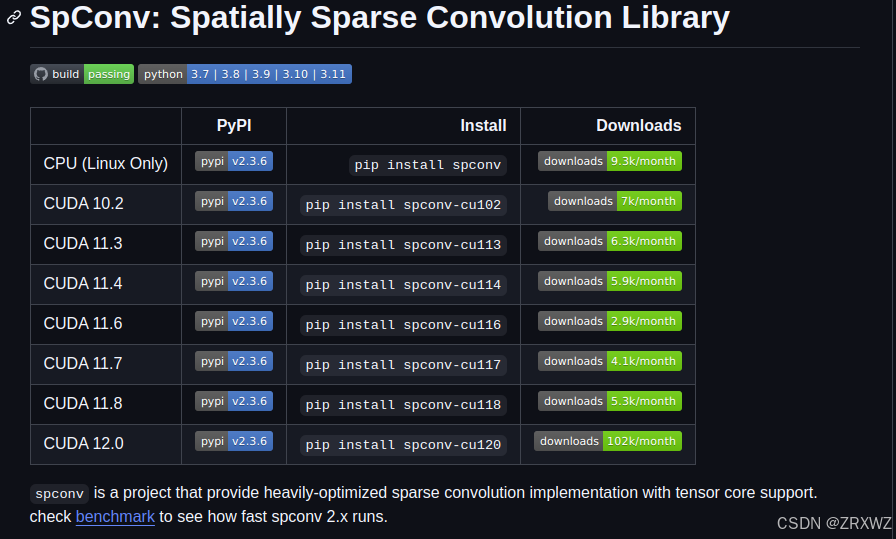 选择合适自己的版本进行安装
选择合适自己的版本进行安装
4.安装其他库
pip install av2
pip install kornia==0.5.8以下是用于模型转换的库
pip install pyyaml scikit-image onnx==1.14.0 onnx-simplifier==0.4.33
pip install onnx_graphsurgeon==0.3.27 --index-url https://pypi.ngc.nvidia.compip install onnxruntime==1.15.1三、安装OpenPCDet
git clone https://github.com/open-mmlab/OpenPCDet.gitcd OpenPCDetpip install -r requirements.txtpip install -v e .四、下载kitti数据集并进行数据处理
kitti数据集官网:The KITTI Vision Benchmark Suite
选择object/3d,下载下图标注的4个文件
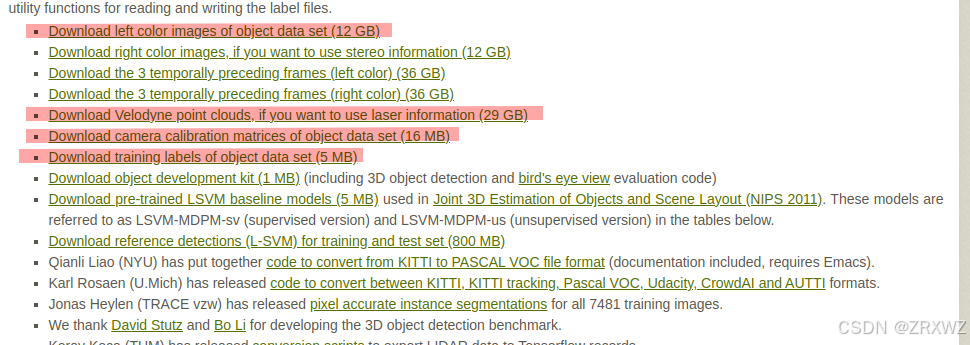
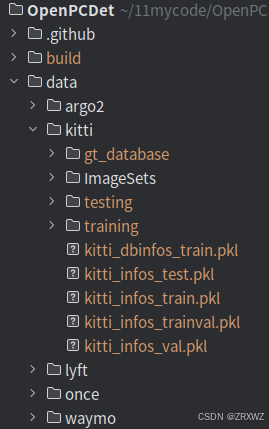
最后将数据集放置在openpcdet/data/kitti目录下,该目录下具体结构如下
├── data
│ ├── kitti
│ │ ├── ImageSets
│ │ ├── testing
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── velodyne
│ │ ├── training
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── label_2
│ │ │ ├── velodyne
注意,测试集中没有标签文件。
运行以下命令进行数据集转换,注意,命令最后是kitti_dataset.yaml文件的绝对地址,注意修改。
python -m pcdet.datasets.kitti.kitti_dataset create_kitti_infos /home/zhurui/11mycode/OpenPCDet/tools/cfgs/dataset_configs/kitti_dataset.yaml
命令结束后会生成对应的pkl文件,文件目录如下图
五、模型训练
运行以下命令进行训练,注意,这里同样是文件绝对路径,注意修改。
python train.py --cfg_file /home/zhurui/11mycode/OpenPCDet/tools/cfgs/kitti_models/pointpillar.yaml --batch_size 4 --epochs 50如果出现报错
KeyError: Caught KeyError in DataLoader worker process 0.
KeyError: ‘road_plane’前往kitti-dataset.yaml和pointpillar.yaml文件中进行修改,在pycharm中使用ctrl+f搜索
USE_ROAD_PLANE将所有的Ture修改为False即可。
开始训练!暂时写到这里下次再续。
#2024.10.25第一次后续修改添加
作者在使用demo.py程序时,发现报错没有库open3d和mayavi,通过程序可知这两个库只需要安装其中一个进行可视化点云即可,在使用命令pip install open3d-python后,发现pip install mayavi报错,原因是vtk和pyqt、mayavi版本不兼容,网上查询发现有以下安装版本,但是作者试验后失败:
pip install vtk==9.0.1
pip install mayavi==4.7.3
pip install pyqt5作者各种各种试验后仍然没有成功在python=3.8环境中安装mayavi,最后使用安装以下命令安装open3d后解决mayavi报错
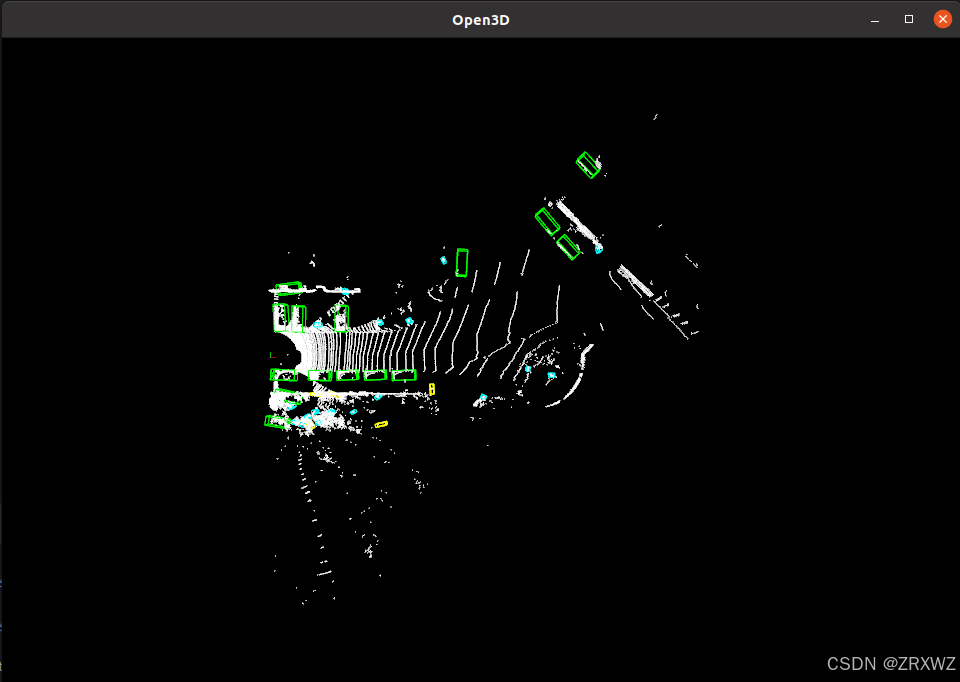
pip install open3d-pythonpip install open3d==0.17.0最后运行demo.py可视化成功,运行命令如下:
python3 -s demo.py --cfg_file cfgs/kitti_models/pointpillar.yaml --ckpt /home/zhurui/11mycode/OpenPCDet/output/home/zhurui/11mycode/OpenPCDet/tools/cfgs/kitti_models/pointpillar/default/ckpt/checkpoint_epoch_50.pth --data_path /home/zhurui/11mycode/OpenPCDet/data/kitti/testing/velodyne/000005.bin
注意将三个文件路径换成自己的。
最终得到如下可视化结果
#暂时到这里



















 971
971





 到【灌水乐园】发言
到【灌水乐园】发言







