






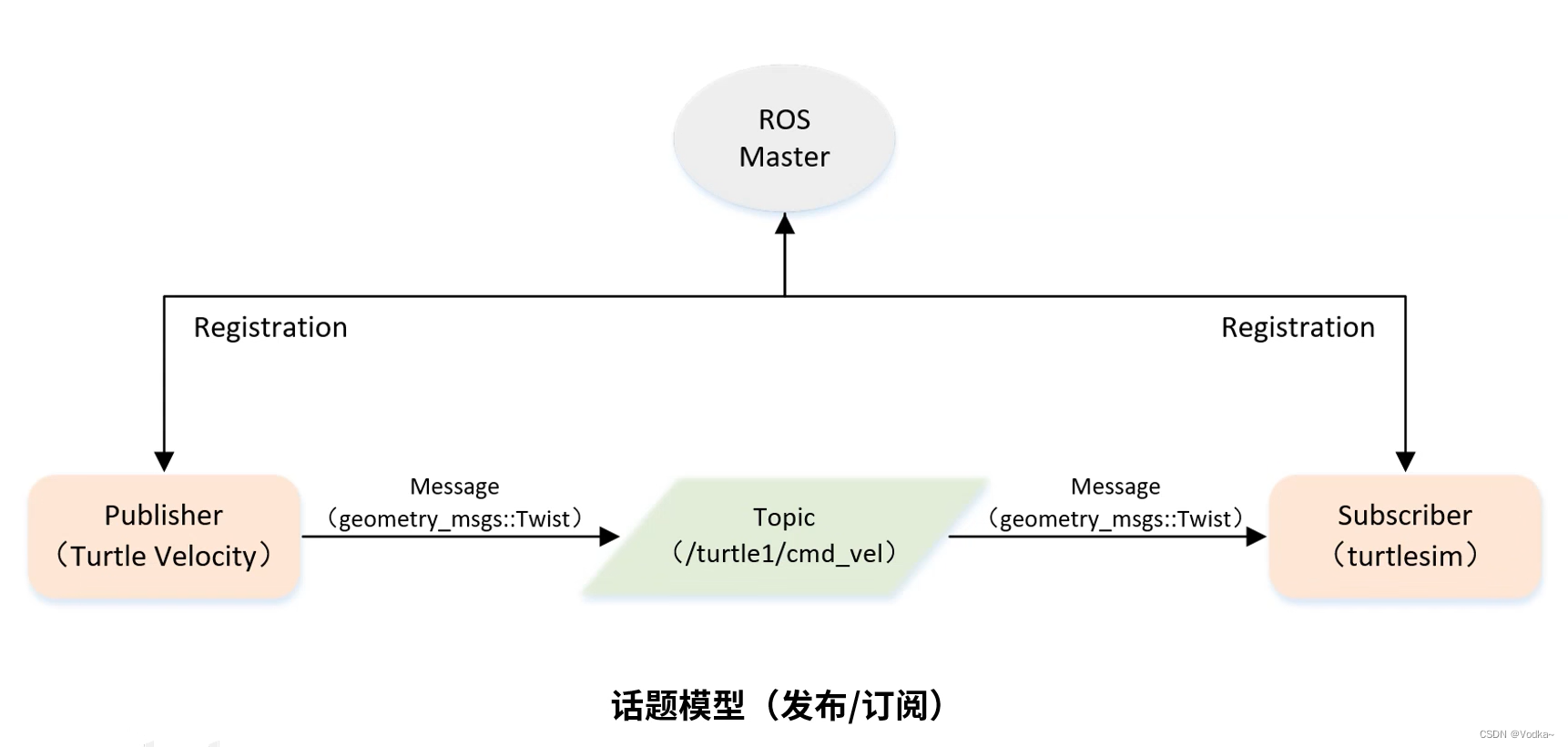
发布、订阅关系架构
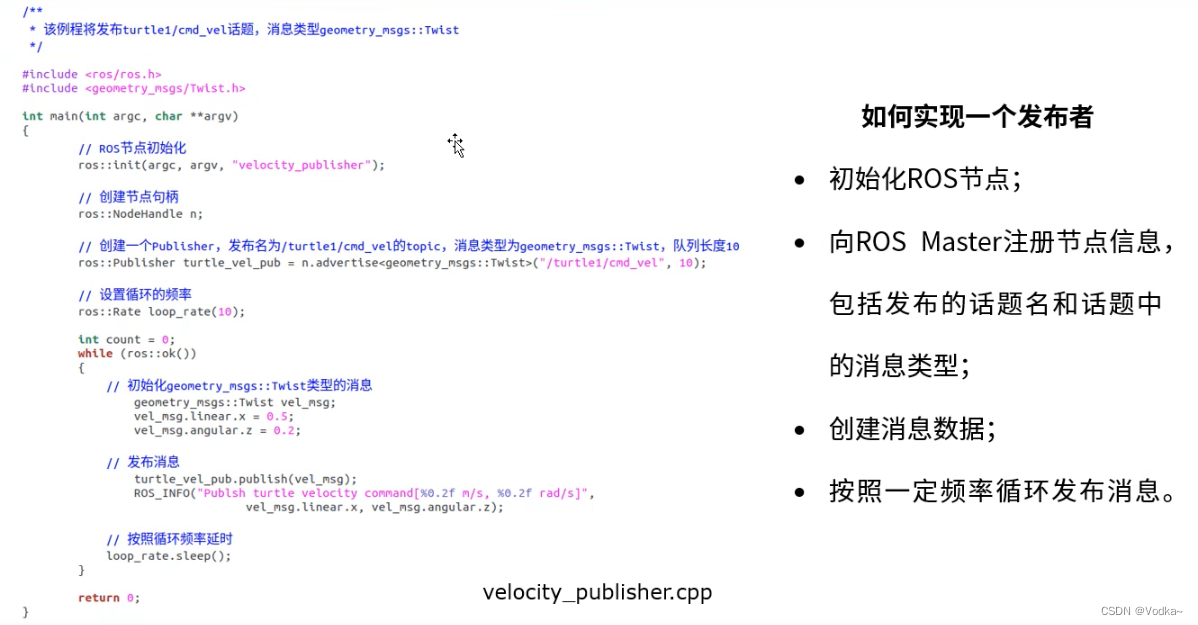
创建发布者代码
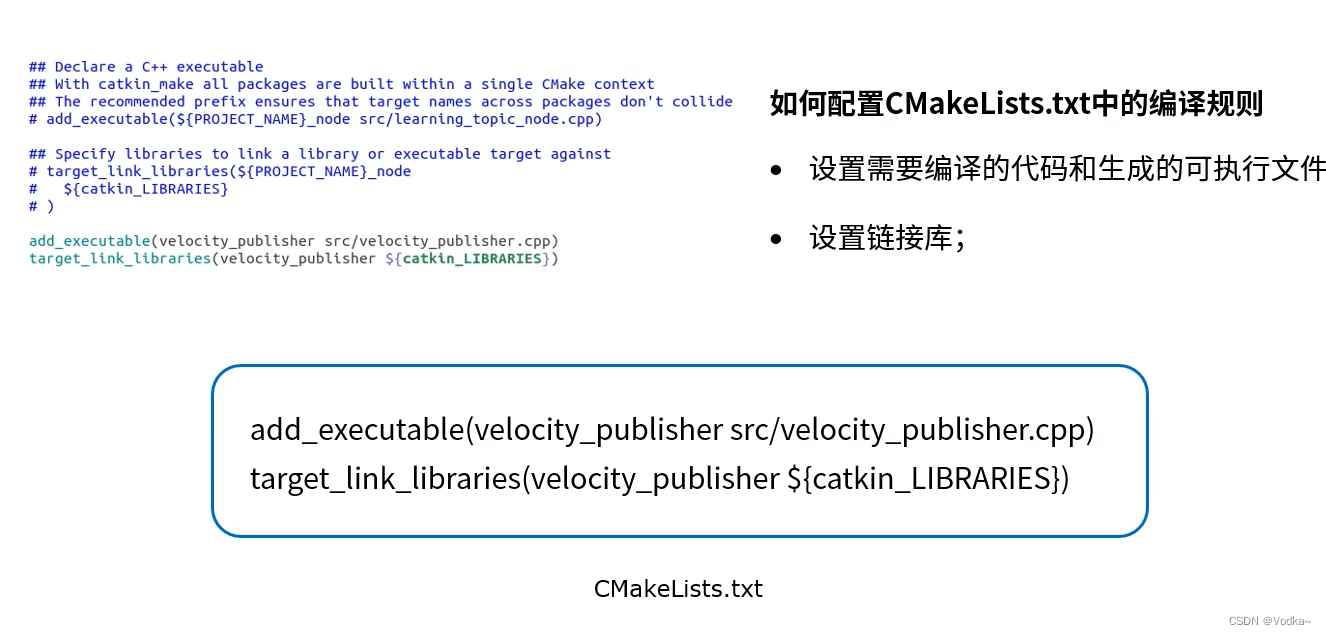
通过CMakeList设置代码编译规则
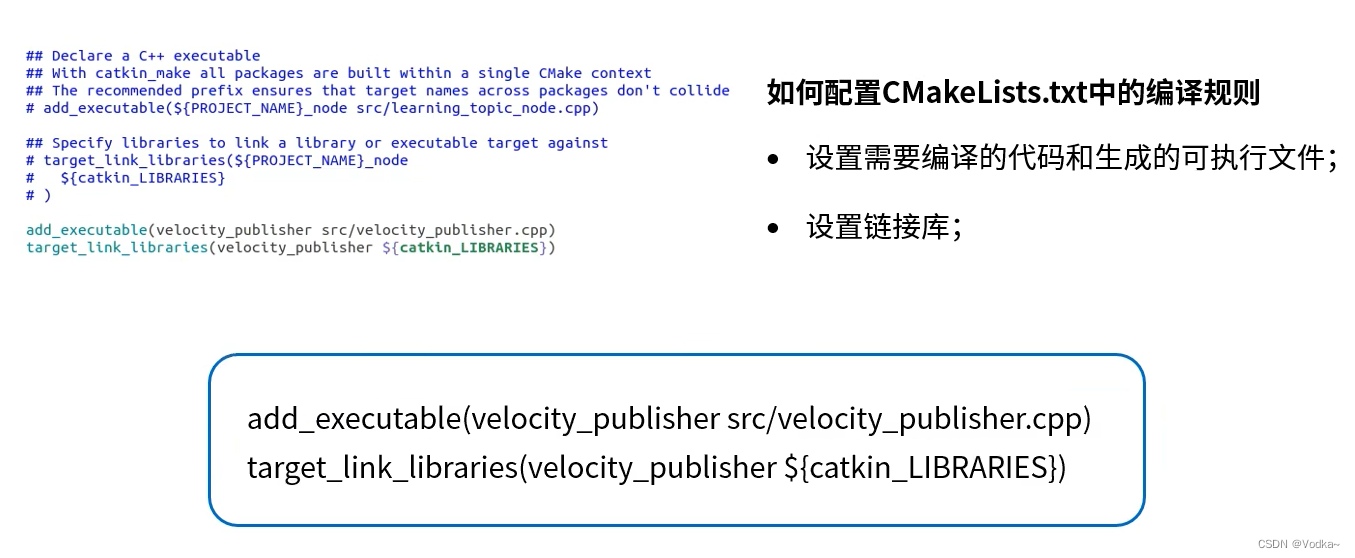
- add_executable(velocity_publisher src/velocity_publisher.cpp)
- target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
Velocity
Velocity这个词有多重含义,具体意思根据上下文有所不同:
物理学中,velocity(速度)是指物体移动的速度和方向,是一个既有大小又有方向的矢量,用来描述物体在空间中的运动状态。
工程领域,特别是在流体力学中,velocity描述固体、液体或气体的速度,用于说明流体的动力学特性。
计算机编程领域,Velocity是一种模板语言,允许开发者以简单灵活的方式将数据插入到模板中,从而动态生成HTML、XML、JSON等多种格式的文档,常用于Web应用程序和框架中。
总结来说,velocity基本含义是“速度”或“速率”,但在不同学科和情境下有着具体的适用场景和解释。
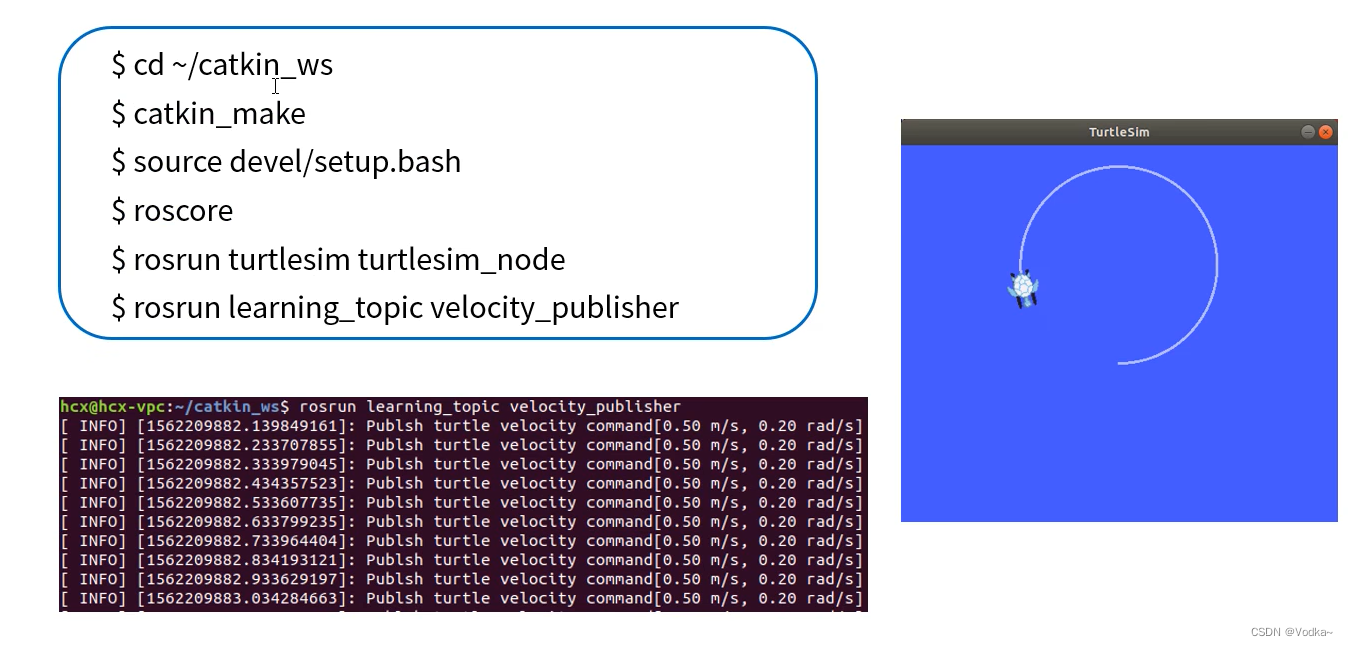
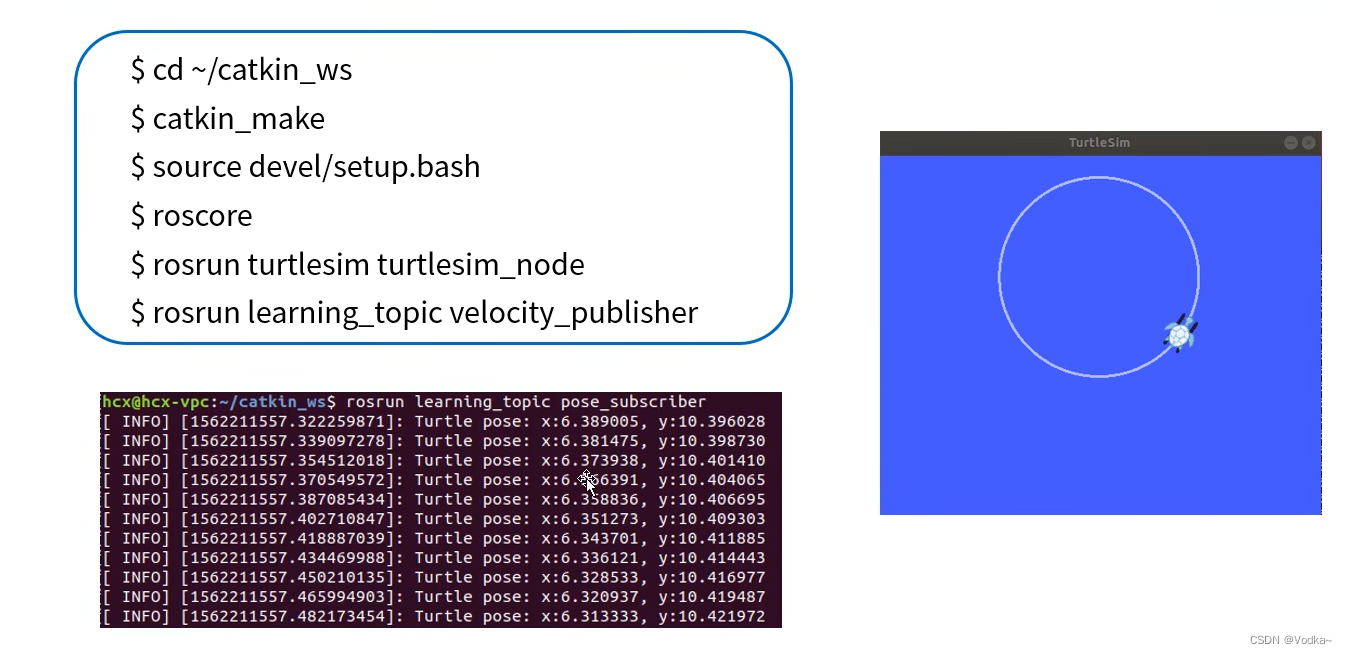
编译并运行发布者
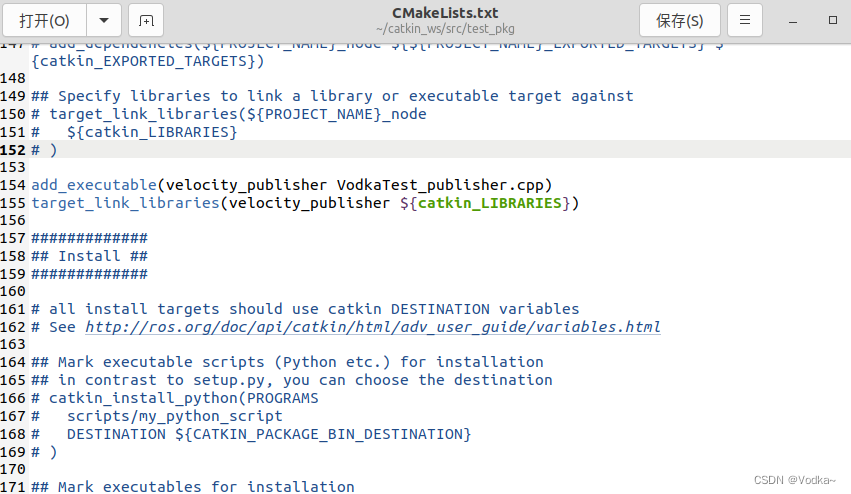
配置发布者的代码编译规则
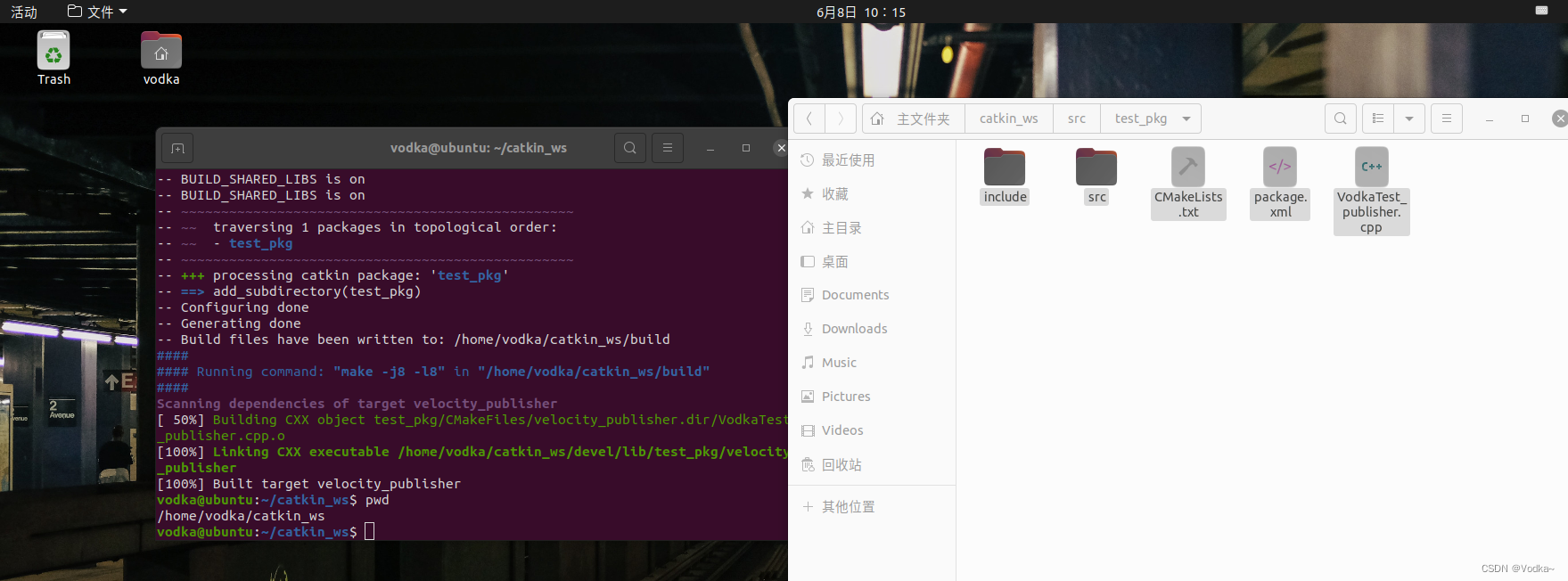
目录结构(打开CMakeLists.txt,在build内,install前内容添加下面两句话,注意CMakeLists.txt与C++源程序之间的路径关系,CMakeLists.txt 里的src/velocity_publisher不能改,否则海龟动不了,泪的教训!)
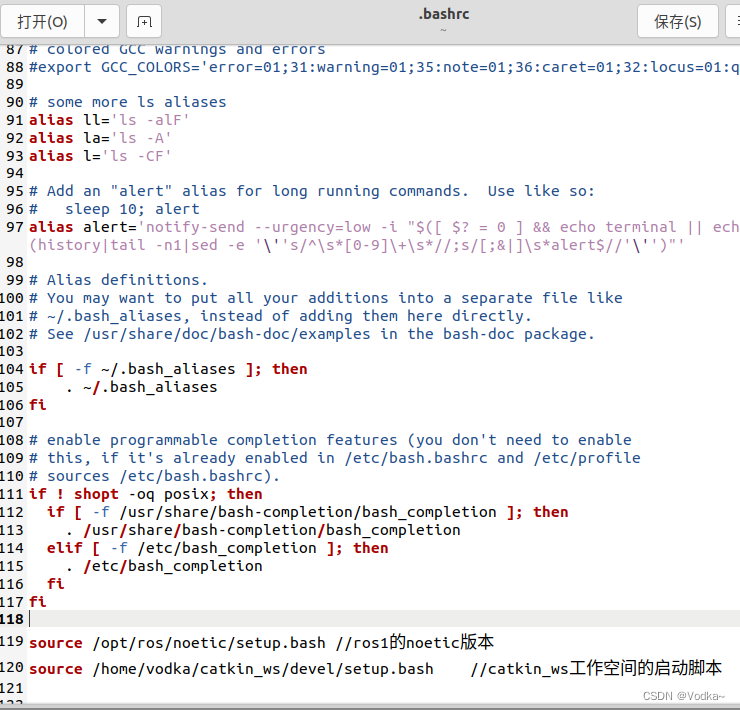
将工作空间的启动脚本加入 .bashrc 文件,这样不用每次执行都输入一次脚本执行命令
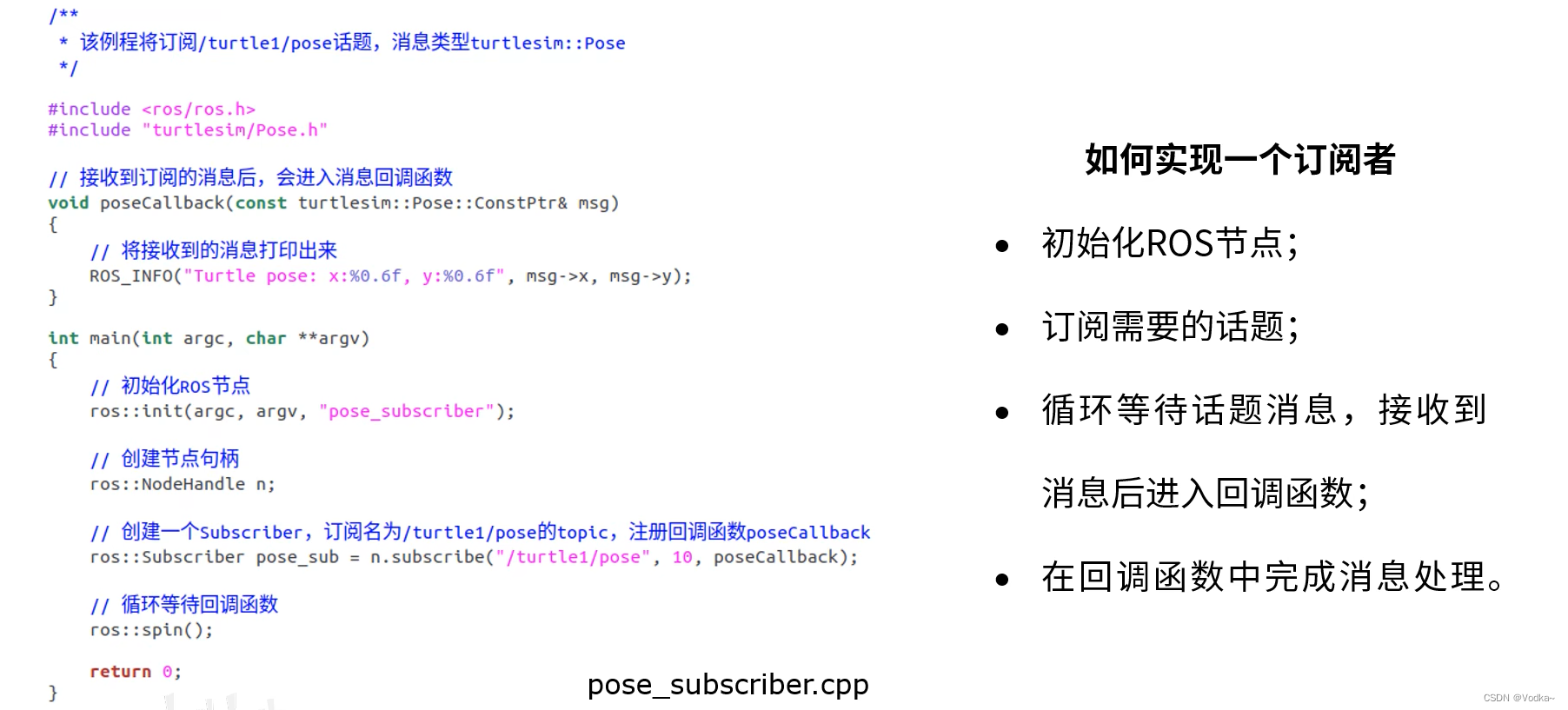
订阅者代码(回调函数尽量避免嵌套)
设置环境变量、链接库

编译工作空间

编译运行发布者

















 1001
1001

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









