 DRV871x-Q1的PWM控制与死区时间管理
DRV871x-Q1的PWM控制与死区时间管理





前言
在前两期连载中,我们分析了DRV871x-Q1的产品架构、引脚配置和电气特性。本期我们将深入探讨DRV871x-Q1的PWM控制模式和死区时间管理技术,这是实现高效、可靠电机控制的关键。
PWM控制模式决定了如何将输入信号映射到半桥驱动器,而死区时间管理则确保安全的开关过程,防止直通电流。DRV871x-Q1在这两方面都提供了创新的解决方案,为汽车电子系统带来了显著的性能提升。
PWM控制模式深度解析
四种PWM输入模式概述
DRV871x-Q1提供四种PWM输入模式,适应不同的应用需求:
| 模式 | 名称 | 描述 | 应用场景 |
|---|---|---|---|
| 0 | 独立半桥模式 | 每个PWM输入控制一个半桥 | 多个独立负载控制 |
| 1 | 锁相半桥模式 | PWM输入成对控制半桥 | 同步控制应用 |
| 2 | H桥模式1 | 输入信号控制H桥 | 双向电机控制 |
| 3 | H桥模式2 | 带死区时间的H桥控制 | 高频PWM应用 |
PWM模式通过SPI接口(S型号)或MODE引脚(H型号)配置:
SPI配置(S型号):
DEVICE_CTRL寄存器(0x01)的PWM_MODE[1:0]位: 00: 独立半桥模式 01: 锁相半桥模式 10: H桥模式1 11: H桥模式2
硬件配置(H型号):
MODE引脚电压电平: 0.8V: 独立半桥模式 1.8V: 锁相半桥模式 3.0V: H桥模式1 4.2V: H桥模式2
模式0:独立半桥模式
在独立半桥模式下,每个PWM输入控制一个半桥:
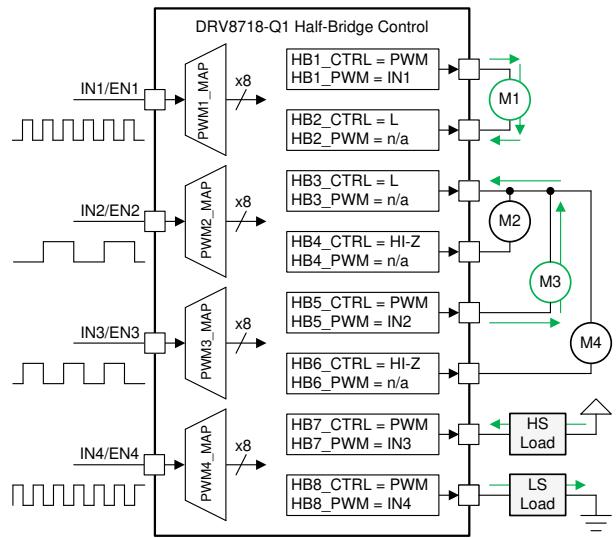
图1:独立半桥模式PWM映射示例
工作原理:
输入到输出映射: IN1 → 半桥1 IN2 → 半桥2 IN3 → 半桥3 IN4 → 半桥4 对于DRV8718S-Q1(8通道): 通过SPI配置HBx_PWM寄存器实现额外半桥的映射
控制逻辑:
PWM高电平:高侧MOSFET导通,低侧MOSFET关闭 PWM低电平:高侧MOSFET关闭,低侧MOSFET导通
应用场景:
-
多个独立负载控制
-
电磁阀控制
-
LED照明控制
-
多通道开关控制
优势:
-
最大化通道利用率
-
简单直观的控制逻辑
-
灵活的负载配置
模式1:锁相半桥模式
在锁相半桥模式下,PWM输入成对控制半桥:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1144
1144

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











