




前言
在前三期连载中,我们分析了DRV871x-Q1的产品架构、引脚配置和规格参数。本期我们将深入探讨SPI接口版本的寄存器映射和编程方法,这是充分发挥DRV871x-Q1智能化功能的关键。
SPI接口不仅提供了丰富的配置选项,还支持实时状态监测和故障诊断。通过合理的寄存器配置,可以实现精确的电机控制和可靠的系统保护。
SPI通信协议深度解析
通信时序与帧格式
DRV871x-Q1采用标准的SPI协议,具体参数:
-
时钟极性(CPOL):0(空闲时为低电平)
-
时钟相位(CPHA):0(第一个边沿采样)
-
数据位宽:16位
-
最大时钟频率:10MHz
-
字节序:MSB优先
SPI帧结构:
Bit 15: R/W位(0=写,1=读) Bit 14-8: 寄存器地址(7位) Bit 7-0: 数据字段(8位)
通信时序详解
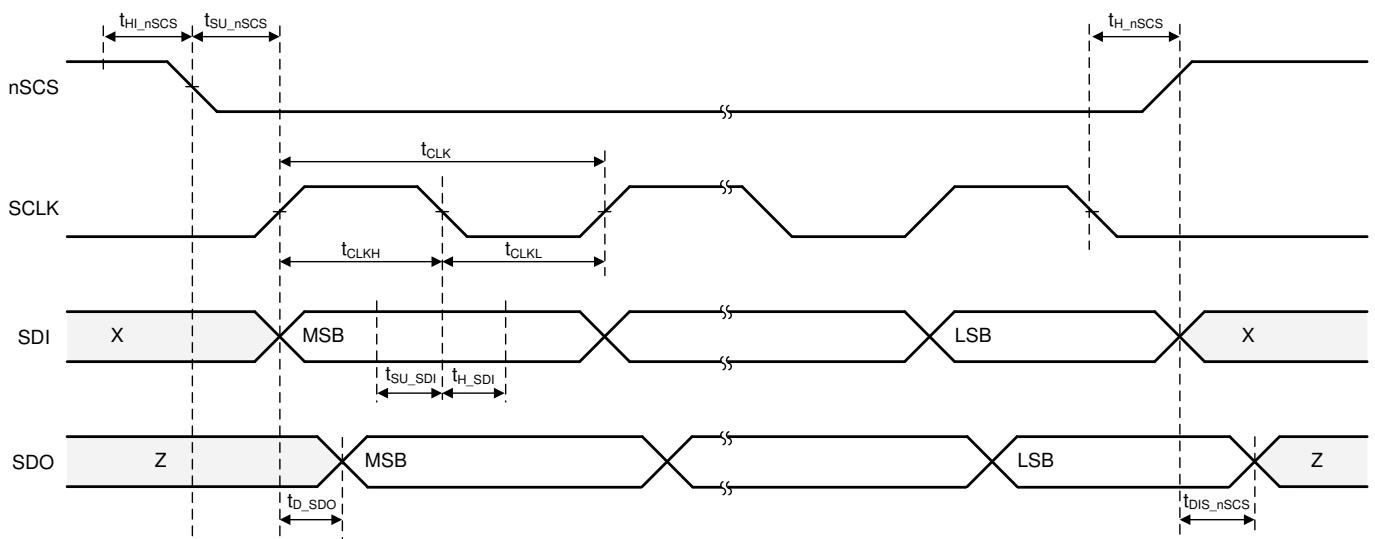
图1:SPI通信时序图
写操作时序:
1. nSCS拉低,开始通信 2. 发送16位命令帧:[0][地址7位][数据8位] 3. nSCS拉高,结束通信 4. 器件内部处理时间:<1μs
读操作时序:
1. nSCS拉低 2. 发送16位命令帧:[1][地址7位][0x00] 3. 接收16位响应帧:[状态位][地址7位][数据8位] 4. nSCS拉高
菊花链模式: DRV871x-Q1支持多器件菊花链连接:
器件数量:最多63个 帧长度:16位 × 器件数量 数据传输:同时写入所有器件
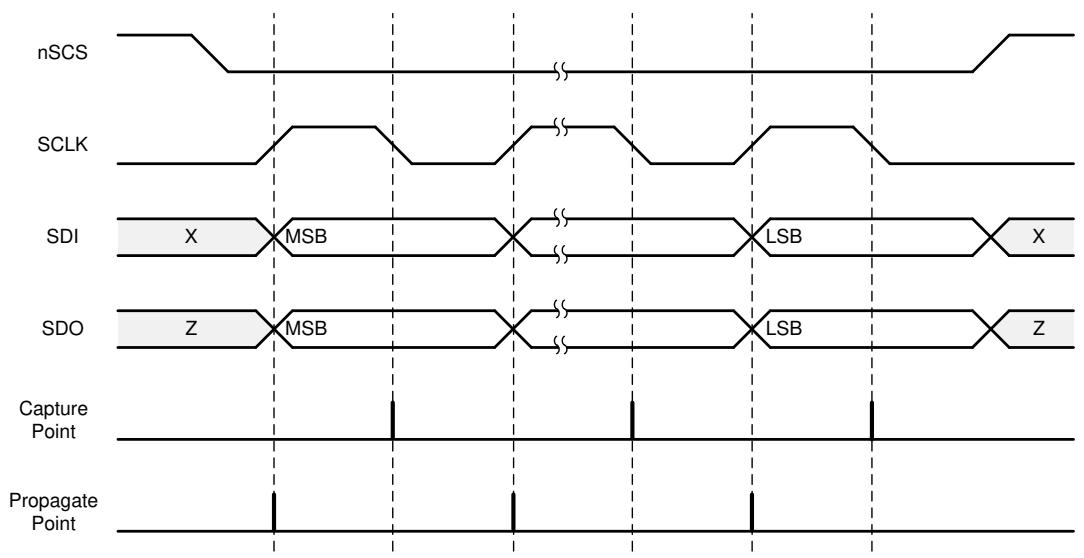
图2:SPI从机时序图
寄存器映射架构
寄存器地址分配
DRV871x-Q1的寄存器按功能分组:
| 地址范围 | 功能分组 | 主要用途 |
|---|---|---|
| 0x00-0x0F | 全局控制 | 器件使能、模式设置 |
| 0x10-0x1F | 驱动控制 | 栅极驱动参数 |
| 0x20-0x2F | 保护设置 | VDS/VGS监测配置 |
| 0x30-0x3F | 电流检测 | 放大器配置 |
| 0x40-0x4F | 状态寄存器 | 故障状态报告 |
| 0x50-0x5F | 诊断功能 | 离线诊断控制 |
寄存器访问权限
只读寄存器:
-
状态寄存器(0x40-0x4F)
-
器件ID寄存器(0x00)
读写寄存器:
-
配置寄存器(0x01-0x3F)
-
诊断控制寄存器(0x50-0x5F)
写保护机制: 某些关键寄存器需要解锁序列:
1. 写入0x5A到UNLOCK寄存器 2. 写入0xA5到UNLOCK寄存器 3. 在100ms内完成配置写入 4. 自动重新锁定
核心配置寄存器详解
器件控制寄存器(0x01 - DEVICE_CTRL)
Bit 7: EN_DRV - 驱动器总使能 0: 禁用所有
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 689
689

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











