




前言
在前五期连载中,我们从产品架构、引脚配置、规格参数、寄存器编程到应用实现,全面解析了DRV871x-Q1系列智能栅极驱动器。本期我们将深入探讨DRV871x-Q1的功能框图和时序特性,这是理解芯片内部工作机制的关键。
通过分析功能框图,我们能够清晰地了解各功能模块之间的关系和信号流向;通过时序分析,我们能够掌握芯片在不同工作状态下的动态特性。这些知识对于系统设计和故障排查都至关重要。
功能框图深度解析
整体架构
DRV871x-Q1的功能框图展示了其高度集成的系统架构:
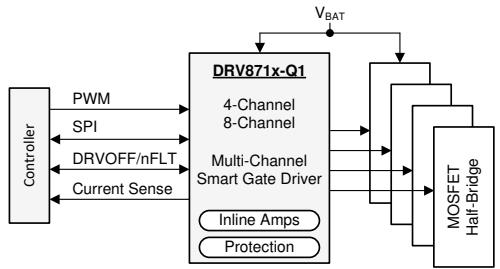
从功能框图中,我们可以清晰地看到DRV871x-Q1的主要功能模块:
-
输入接口:PWM输入和SPI接口
-
控制逻辑:模式选择和输出映射
-
栅极驱动器:多个半桥驱动通道
-
电荷泵系统:提供栅极驱动电压
-
保护电路:多种故障监测和保护功能
-
电流检测放大器:宽共模电流检测
关键功能模块详解
1. 输入接口与控制逻辑
输入接口部分包括:
-
PWM输入引脚:IN1/EN1, IN2/PH1, IN3/EN2, IN4/PH2
-
SPI接口:SCLK, SDI, SDO, nSCS (S型号)
-
模拟配置引脚:DRVIVE, MODE, GAIN, VDS (H型号)
控制逻辑根据PWM_MODE设置,将输入信号映射到相应的半桥驱动器:
| PWM模式 | 描述 | 输入映射 |
|---|---|---|
| 模式0 | 独立半桥 | 每个输入控制一个半桥 |
| 模式1 | 锁相半桥 | 输入成对控制半桥 |
| 模式2 | H桥模式1 | IN1/IN2控制H桥1,IN3/IN4控制H桥2 |
| 模式3 | H桥模式2 | 带死区时间的H桥控制 |
信号流分析:
PWM输入 → 输入滤波 → 模式解码 → 死区时间生成 → 驱动器控制
2. 电荷泵系统
电荷泵系统是DRV871x-Q1的核心技术之一,它通过三级电荷泵实现高效的电压提升:
电荷泵工作原理:
第一级:PVDD → CP1H/CP1L → 2×PVDD 第二级:2×PVDD → CP2H/CP2L → 3×PVDD 第三级:内部优化 → VCP输出
电荷泵控制逻辑:
-
开关频率:500kHz (典型值)
-
反馈控制:根据负载自动调整
-
保护机制:欠压监测和过载保护
3. 栅极驱动器架构
每个半桥驱动器包含:
-
高侧驱动器:连接到GHx引脚
-
低侧驱动器:连接到GLx引脚
-
源极检测:连接到SHx引脚
-
智能控制逻辑:死区时间管理和保护
智能驱动特性:
-
可调压摆率控制
-
自适应传播延迟
-
死区时间握手机制
-
过流和栅极故障保护
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











