





第一阶段:核心原理(“S平面”是桥梁)
在数字控制理论中,有一个最基本的公式连接着连续域(S平面)和离散域(Z平面):
第二阶段:详细推导 例 6.1
1. 初始状态分析
已知原始控制器:
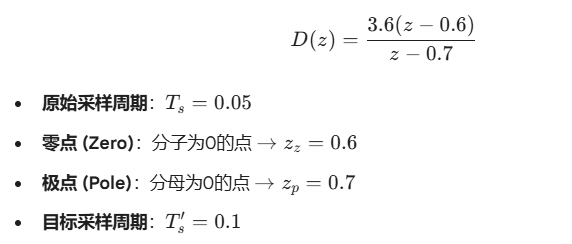
2. 第一步:映射到 S 平面 (找物理本质)
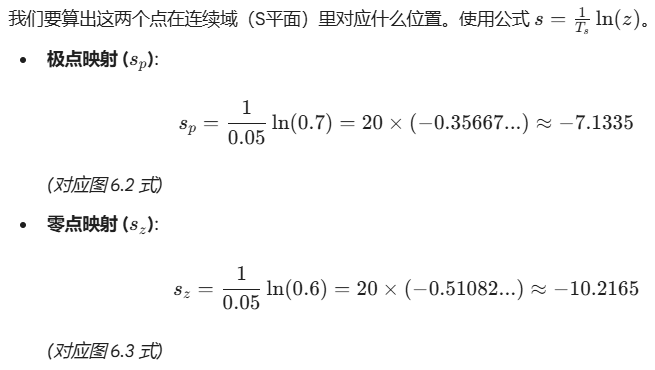
直观理解:这一步相当于找到了这个控制器在“模拟电路”世界里对应的参数。
3. 第二步:映射回 Z 平面 (使用新周期)
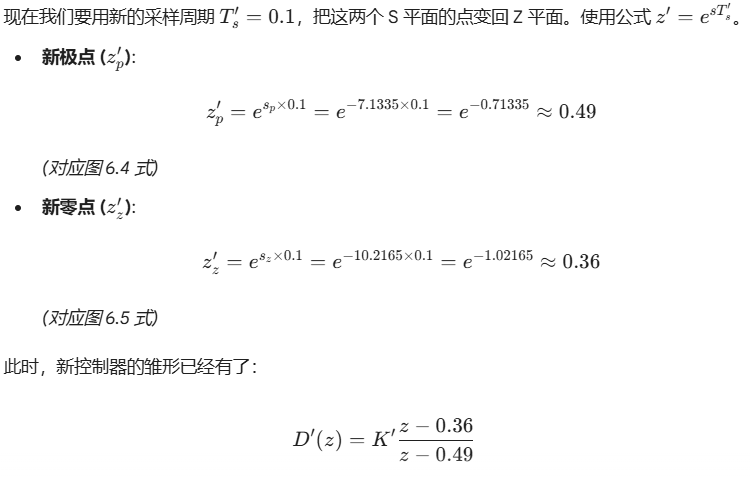
(注意:这里的增益还是未知的,不能直接用原来的 3.6)
4. 第三步:增益修正 (保证稳态一致)
这是最容易被忽略的一步。更换采样率后,不能只改极零点,还必须保证**“输入一个单位阶跃信号,最终输出的稳态值”**依然相等。
在数字控制中,求稳态值(直流增益)最简单的方法是令。
(原理:当时间趋于无穷大时,信号不再变化,相当于频率为0,此时)
-
计算原控制器的稳态值 (令
):

-
(对应图 6.7 式)
-
计算新控制器的稳态值 (令

(对应图 6.8 式)
-
求解
:
让新旧稳态值相等:
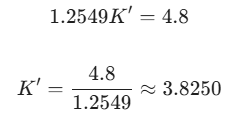
(对应图 6.9 式)
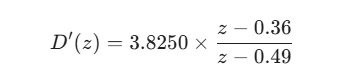
5. 最终结果
将算出的新参数组合起来:
总结
整个过程其实就是“三步走”:



















 705
705

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









