




在现代工业和汽车电子的血管里,流淌的不是血液,而是数据。而承载这些数据流动的血管,就是 CAN 总线 (Controller Area Network)。
无论你是正在调试 STM32 的嵌入式工程师,还是试图破解爱车数据的极客,CAN 总线都是一道必须跨过的门槛。本文将带你从最底层的物理信号开始,一路向上,直到你能够亲手写出通信代码并解析出“发动机转速”。
第一部分:核心原理——两根线的艺术
1.1 为什么是 CAN?
在 CAN 诞生之前,汽车电子采用“点对点”布线。设备越多,线束越乱,重量越重。CAN 的出现将所有设备挂在两根线上(CAN_H 和 CAN_L),实现了广播式通信。
1.2 物理层:差分信号的抗扰魔法
CAN 能够适应恶劣的电磁环境(如引擎室),核心在于差分信号。它不看电压绝对值,只看电压差。
-
隐性 (Recessive, 逻辑 1): CAN_H ≈ 2.5V, CAN_L ≈ 2.5V。电压差 ≈ 0V。
-
显性 (Dominant, 逻辑 0): CAN_H ≈ 3.5V, CAN_L ≈ 1.5V。电压差 ≈ 2V。
关键点: 只要有节点发“显性0”,总线就是0。只有所有人都发“隐性1”,总线才是1。“0”具有压倒性优势。
1.3 仲裁机制:谁先说话?
CAN 没有主从之分。当两个节点同时发送数据时,利用“线与”机制进行无损仲裁:
-
节点 A 发送 ID
0x123(二进制001...) -
节点 B 发送 ID
0x125(二进制001...) -
在前几位大家都一样,但在某一位,A 发送 0,B 发送 1。
-
由于 0 是显性,总线呈现为 0。
-
B 节点检测到冲突(自己发 1 却读回 0),主动退出,转为接收。
-
A 节点胜出,继续发送,数据不受任何影响。
结论:ID 越小,优先级越高。
第二部分:硬件选型——工欲善其事
要玩转 CAN,你需要了解两个核心概念:CAN 控制器 (Controller) 和 CAN 收发器 (Transceiver)。
2.1 芯片选型指南
大多数现代 MCU(如 STM32)内部集成了 CAN 控制器(处理协议逻辑),但无法直接连接物理总线,必须搭配外部收发器(处理电压转换)。
| 角色 | 推荐芯片/型号 | 适用场景 | 备注 |
| 收发器 (5V) | TJA1050 | 经典工业/老式汽车 | 仅支持 5V 逻辑,STM32 使用需注意电平匹配。 |
| 收发器 (3.3V) | SN65HVD230 | STM32 / ESP32 开发 | 3.3V 供电,完美兼容现代 MCU,体积小。 |
| 收发器 (车规) | TCAN1042 | 汽车电子产品 | TI 出品,抗干扰强,带保护功能。 |
| 控制器 (外挂) | MCP2515 | Arduino / Raspberry Pi | SPI 接口转 CAN。如果主控没 CAN 外设,必选此方案。 |
2.2 调试工具:CAN 分析仪
你需要一双“眼睛”来看到总线上的数据:
-
入门级 (50-100元): USB-CAN (基于 STM32)。通常配合上位机软件(如 CandleLight 或厂商自带软件),适合简单的收发调试。
-
进阶级 (1000元+): PCAN-USB (Peak System)。行业标准入门款,驱动极其稳定,支持 Linux/Windows,兼容大部分开源软件。
-
专业级 (1万元+): Vector CANoe/CANalyzer。汽车行业的绝对霸主,功能极其强大,但价格昂贵。
第三部分:实战代码——让芯片说话
3.1 场景 A:STM32 (HAL 库)
STM32 是工业界最常用的 MCU。以下基于 STM32F1/F4 系列。
初始化配置 (CubeMX):
-
开启 CAN1。
-
Prescaler/Time Quanta:配置波特率(如 500kbps)。
-
注意: 两个 Time Quanta 之和加 1 再乘以 Prescaler 需等于总线时钟频率。
发送代码片段:
C
CAN_TxHeaderTypeDef TxHeader;
uint8_t TxData[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
uint32_t TxMailbox;
// 配置帧头
TxHeader.StdId = 0x123; // 标准 ID
TxHeader.RTR = CAN_RTR_DATA; // 数据帧
TxHeader.IDE = CAN_ID_STD; // 标准格式
TxHeader.DLC = 8; // 数据长度 8 字节
TxHeader.TransmitGlobalTime = DISABLE;
// 发送数据
if (HAL_CAN_AddTxMessage(&hcan1, &TxHeader, TxData, &TxMailbox) != HAL_OK) {
// 发送失败处理
Error_Handler();
}
接收过滤器配置 (关键):
如果不配置过滤器,STM32 默认拒绝所有消息!
C
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; // 掩码模式
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000; // 掩码全0表示接收所有ID
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig);
HAL_CAN_Start(&hcan1); // 别忘了启动 CAN
3.2 场景 B:Arduino + MCP2515
对于 Maker 来说,这是最简单的方案。使用 mcp_can 库。
接线:
-
Arduino D10 -> MCP2515 CS
-
Arduino D11 -> MCP2515 MOSI
-
Arduino D12 -> MCP2515 MISO
-
Arduino D13 -> MCP2515 SCK
代码片段:
C++
#include <mcp_can.h>
#include <SPI.h>
MCP_CAN CAN0(10); // CS 引脚为 10
void setup() {
Serial.begin(115200);
// 初始化 CAN: 500kbps, 8MHz 晶振
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK)
Serial.println("CAN Init Successfully!");
else
Serial.println("CAN Init Failed");
CAN0.setMode(MCP_NORMAL);
}
void loop() {
byte data[8] = {0x00, 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07};
// 发送 ID 0x100, 标准帧, 8 字节
byte sndStat = CAN0.sendMsgBuf(0x100, 0, 8, data);
if(sndStat == CAN_OK) Serial.println("Message Sent");
delay(100);
}
第四部分:数据解析——破解 DBC 文件
你成功接收到了一串 Hex 数据:ID: 0x1F4 Data: 05 20 ...。这代表什么?是车速?还是空调温度?
这时候就需要 DBC (DataBase CAN) 文件。它是描述 CAN 数据的“字典”。
4.1 DBC 文件结构
DBC 是文本文件,包含以下核心信息:
-
BO_ (Message): 消息定义。
-
格式:
BO_ [ID] [Name]: [Length] [Sender] -
例:
BO_ 500 EngineData: 8 ECU(ID 500是引擎数据,长度8字节,由ECU发送)
-
-
SG_ (Signal): 信号定义(具体的物理参数)。
-
格式:
SG_ [Name] : [StartBit]|[Length]@[Endianness][Signed] ([Factor],[Offset]) [Min]|[Max] "[Unit]"
-
4.2 解析实战:计算物理值
假设我们有如下 DBC 定义(引擎转速):
SG_ EngineRPM : 24|16@1+ (0.5,0) [0|8000] "rpm"
-
StartBit (起始位): 24
-
Length (长度): 16 bits (2字节)
-
Factor (缩放因子): 0.5
-
Offset (偏移量): 0
收到数据帧 (Hex): 01 02 03 1F 40 00 00 00
步骤:
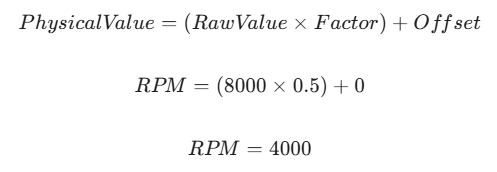
结论: 当前发动机转速为 4000 rpm。


















 728
728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









