








 超级会员免费看
超级会员免费看


前 言
本文主要介绍TL3506-EVM评估板硬件接口资源以及设计注意事项等内容。
RK3506J/RK3506B处理器的IO电平标准一般为1.8V、3.3V,上拉电源一般不超过3.3V或1.8V,当外接信号电平与IO电平不匹配时,中间需增加电平转换芯片或信号隔离芯片。按键或接口需考虑ESD设计,ESD器件选型时需注意结电容是否偏大,否则可能会影响到信号通信。
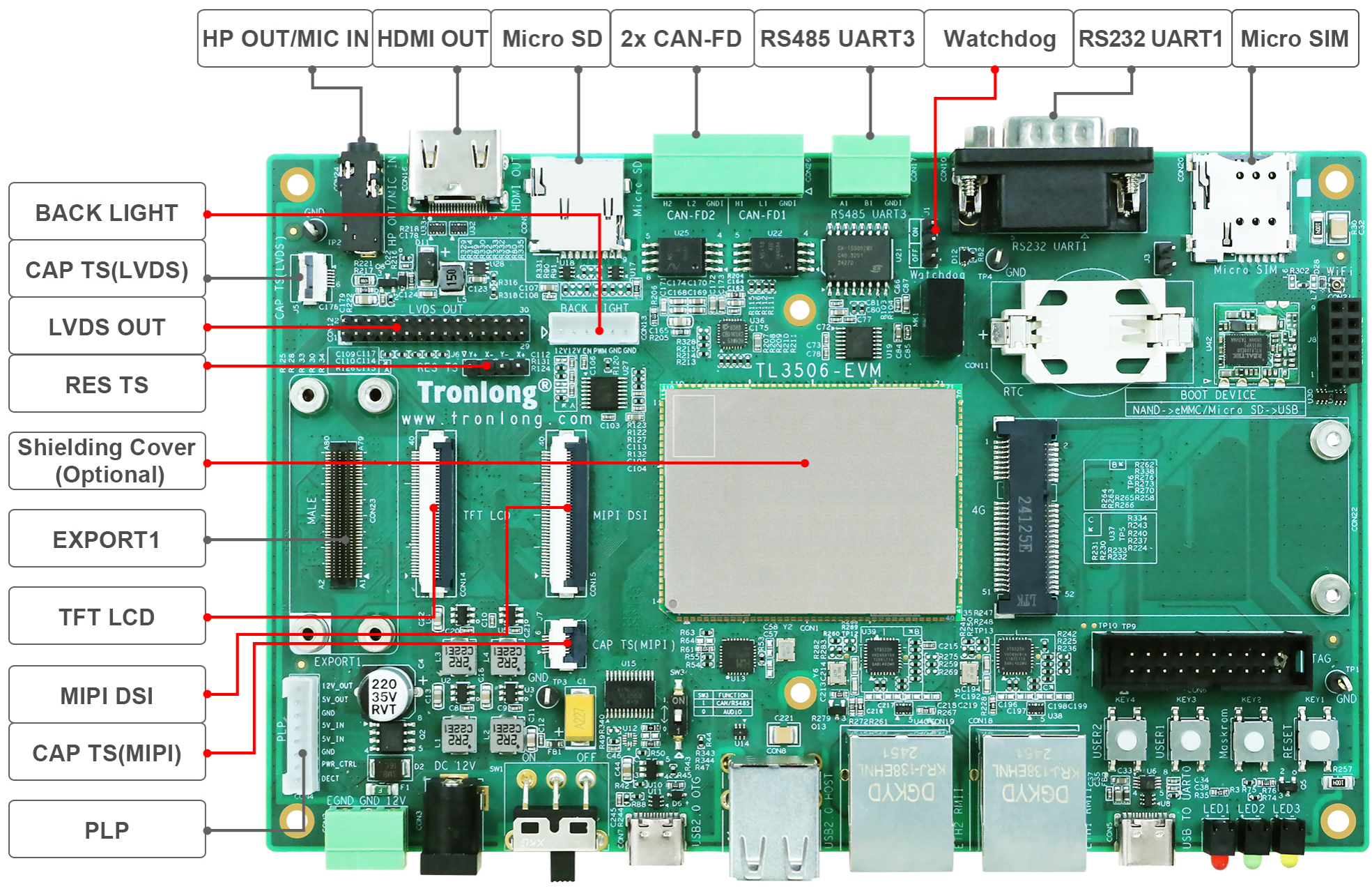
图 1 评估板硬件资源图解1
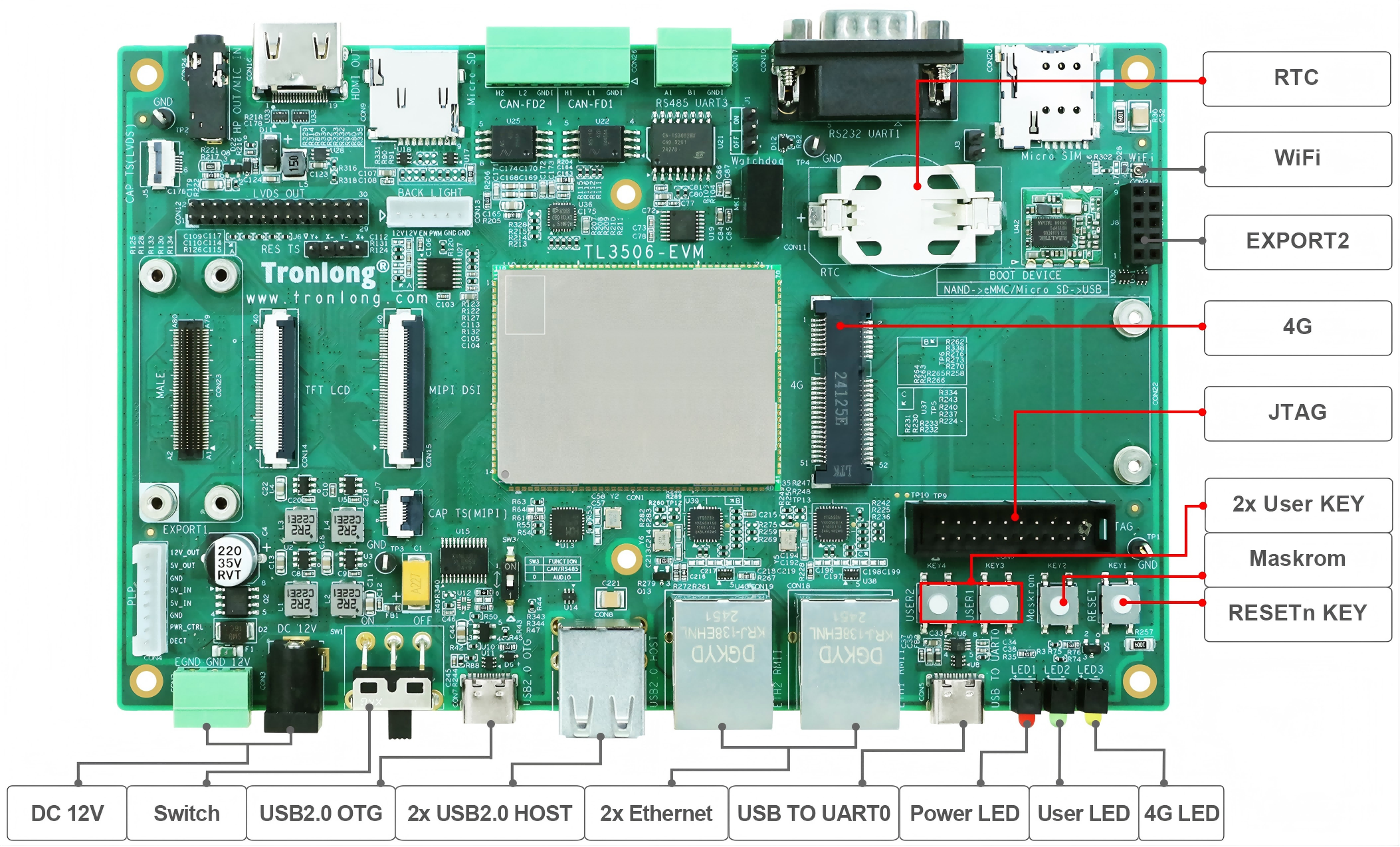
图 2 评估板硬件资源图解2
为便于阅读,如下对文档出现的部分术语进行解释;对于广泛认同释义的术语,本页不做注释。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 678
678

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











