



 介绍由苏黎世联邦理工学院开发的项目,旨在通过创建高程图,使机器人能够在复杂地形上自主导航。项目利用距离传感器和机器人姿态信息,生成具有方差的高程图,以实现更精确的地图构建。
介绍由苏黎世联邦理工学院开发的项目,旨在通过创建高程图,使机器人能够在复杂地形上自主导航。项目利用距离传感器和机器人姿态信息,生成具有方差的高程图,以实现更精确的地图构建。
简介
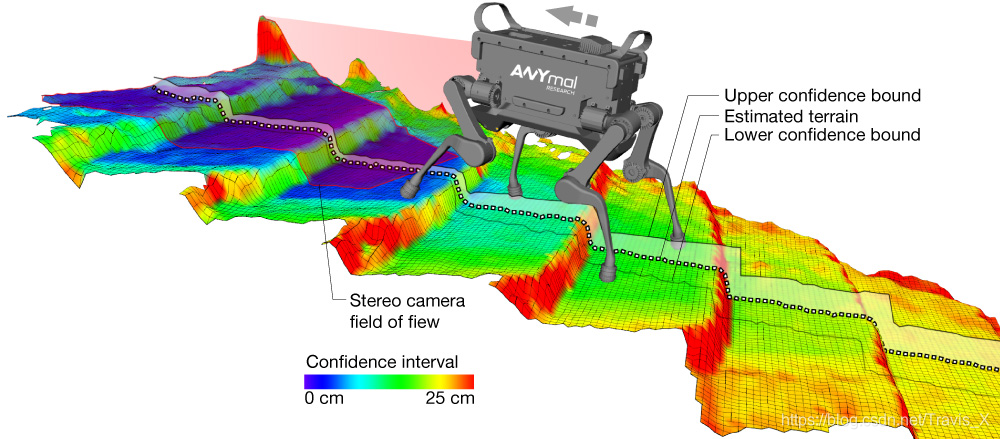
该项目是由苏黎世联邦理工学院(自治系统实验室和机器人系统实验室)开发,用于创建以机器人为中心的高程图,以实现崎岖地形的自主导航任务。
项目演示
https://www.bilibili.com/video/BV1p5411t7Um/
【开源项目分享】Outdoor Terrain Mapping with ANYmal
https://www.bilibili.com/video/BV19k4y197iT/
【开源项目分享】用于机器人崎岖地形导航的高程图创建演示
下载安装
elevation_mapping节点简介
这是该工程最主要的节点,该节点主要使用距离传感器,机器人姿态、方差信息,建立一个具有方差的高程图
订阅话题:
/points (sensor_msgs/PointCloud2) 距离传感器所测量的数据
/pose (geometry_msgs/PoseWithCovarianceStamped) 机器人姿态和姿态协方差
/tf (tf/tfMessage) 坐标信息
发布话题:
elevation_map (grid_map_msg/GridMap) 整个(融合)高程图。 它会定期发布(请参阅fused_map_publishing_rate参数)或者在调用trigger_fusion服务之后发布。
elevation_map_raw (grid_map_msg/GridMap) 融合之前的原始地图
Services
- trigger_fusion (std_srvs/Empty)
触发整个高程图的融合过程并将其发布。 例如,您可以从控制台触发地图融合步骤
rosservice call /elevation_mapping/trigger_fusion
- get_submap (grid_map_msg/GetGridMap)
获取所请求位置和大小的融合高程子图。 例如,您可以在位置(-0.5,0.0)和大小(0.5,1.2)处获取融合高程子图
rosservice call – /elevation_mapping/get_submap -0.5 0.0 0.5 1.2 []
- clear_map (std_srvs/Empty)
启动清除整个地图以进行重置
rosservice call /elevation_mapping/clear_map
- save_map (grid_map_msgs/ProcessFile)
将当前融合的网格图和原始网格图保存到rosbag文件中。 字段topic_name必须是基本名称,即没有前导斜杠字符(/)。 如果字段topic_name为空,则默认使用elevation_map。
rosservice call /elevation_mapping/save_map “file_path: ‘/home/integration/elevation_map.bag’ topic_name: ‘’”
以velodyne32线激光和summit_xl_omni仿真为例
因为summit_xl比较难git下来,可以通过https://download.youkuaiyun.com/download/Travis_X/12321738下载。
创建vlp_32.launch文件
<launch>
<!-- Elevation mapping node -->
<node pkg="elevation_mapping" type="elevation_mapping" name="elevation_mapping" output="screen">
<rosparam command="load" file="$(find elevation_mapping)/config/sensor_processors/velodyne_HDL-32E.yaml" />
</node>
<!-- Launch visualizations for the resulting elevation map -->
<include file="$(find elevation_mapping_demos)/launch/visualization.launch" />
<!-- Launch RViz with the demo configuration -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find elevation_mapping_demos)/rviz/elevation_map_visualization.rviz" />
</launch>
创建yaml文件
# Velodyne_HDL-32E
# TODO
#sensor_processor/type: laser
#sensor_processor/min_radius: 0.018
#sensor_processor/beam_angle: 0.0006
#sensor_processor/beam_constant: 0.0015
point_cloud_topic: "/velodyne_points"
map_frame_id: "map"
robot_base_frame_id: "base_link"
robot_pose_with_covariance_topic: "/ground_truth_pose"
robot_pose_cache_size: 200
track_point_frame_id: "/velodyne"
track_point_x: 0.0
track_point_y: 0.0
track_point_z: 0.0
length_in_x: 20.0
length_in_y: 20.0
position_x: 0.0
position_y: 0.0
resolution: 0.20
min_variance: 0.000009
max_variance: 0.01
mahalanobis_distance_threshold: 2.5
multi_height_noise: 0.0000009
sensor_frame_id: "/velodyne"
sensor_processor/type: laser
sensor_processor/min_radius: 0.018
sensor_processor/beam_angle: 0.0006
sensor_processor/beam_constant: 0.0015
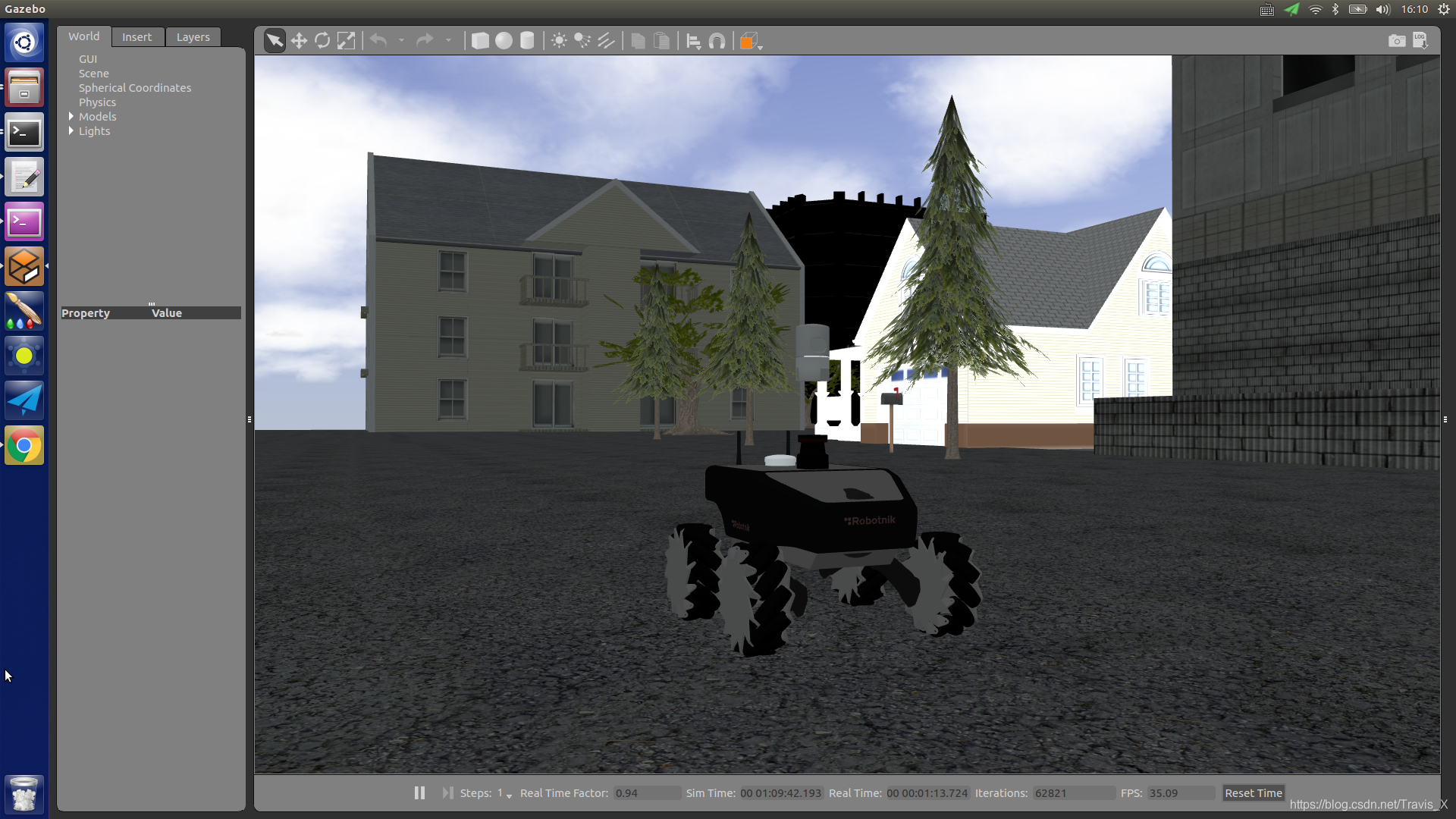
启动gazebo仿真环境和elevation_mapping
roslaunch summit_xl_gazebo summit_xl_omni.launch
rosrun elevation_mapping_demos ground_truth_pose_publisher.py
roslaunch elevation_mapping_demos vlp_32.launch
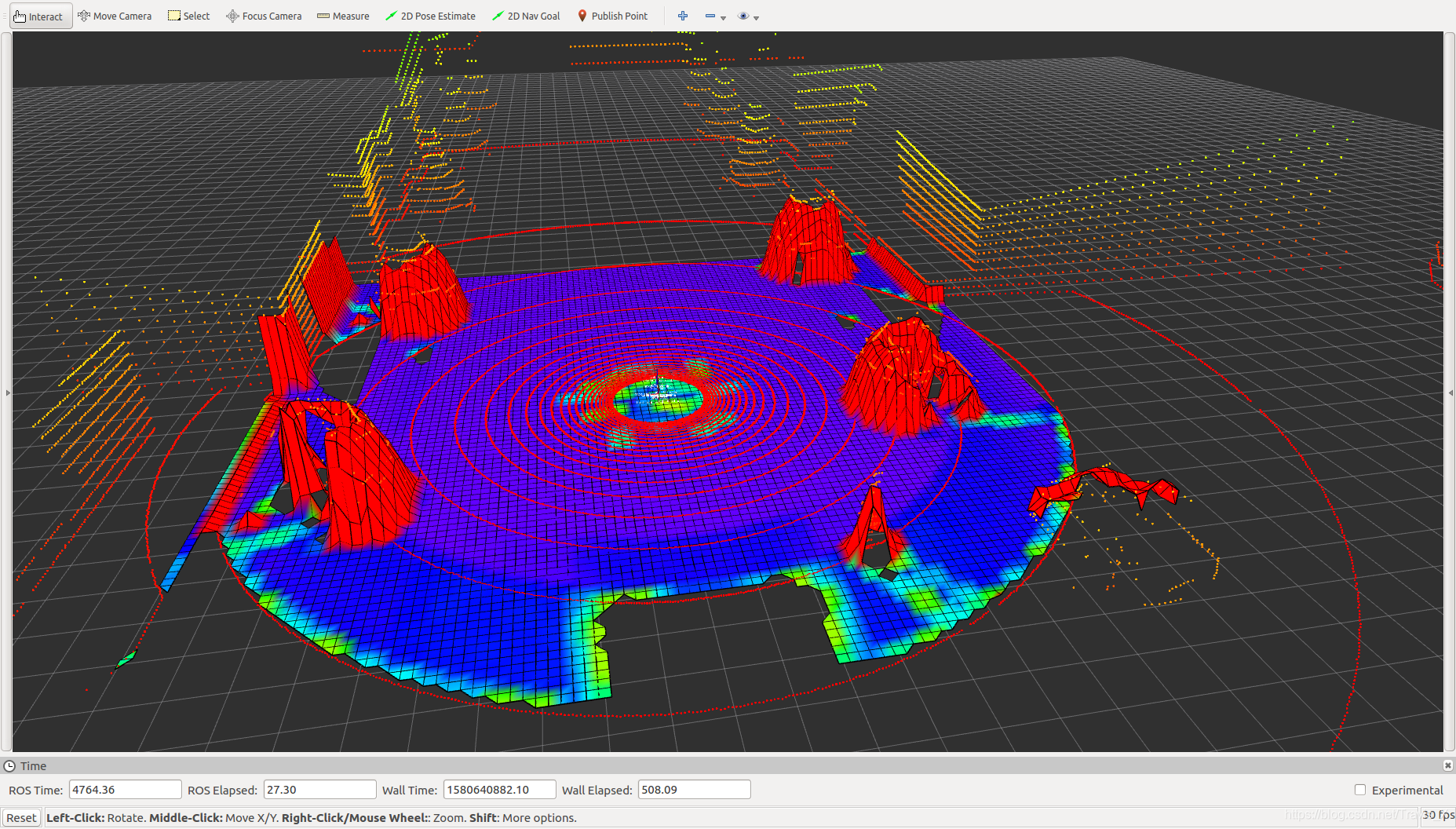
演示效果
graph



















 2096
2096

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











