



 本文详细介绍了如何在Linux环境下创建工作空间,下载并配置Livox-SDK2和ros_driver2,包括克隆仓库、编译安装、IP地址设置以及修改相关配置文件的过程。
本文详细介绍了如何在Linux环境下创建工作空间,下载并配置Livox-SDK2和ros_driver2,包括克隆仓库、编译安装、IP地址设置以及修改相关配置文件的过程。
一. 创建工作空间
$ mkdir nav_ws
$ cd nav_ws
$ mkdir src
二. livox-SDK 2和ros_drver 2下载
1. livox-SDK2
$ cd nav_ws/src
$ git clone https://github.com/Livox-SDK/Livox-SDK2.git
$ cd ./Livox-SDK2/
$ mkdir build
$ cd build
$ cmake .. && make -j
$ sudo make install
如果出现error: ‘uint8_t’,‘uint16_t’ ,‘uint32_t’ does not name a type之类的报错,在对应文件添加
#include <cstdint>
2. livox_ros_driver2
$ git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
$ cd livox_ros_driver2
$ ./buid.sh ROS1
- 克隆的livox_ros_driver2默认在livox_ws中,需将其拷贝到自己工作空间nav_ws/src中。
2025-6新增ros2-jazzy配置
参考链接livox_ros_driver2git clone https://github.com/Ericsii/livox_ros_driver2.git cd <ros_ws> colcon build --symlink-install source ./install/setup.sh
三. IP配置
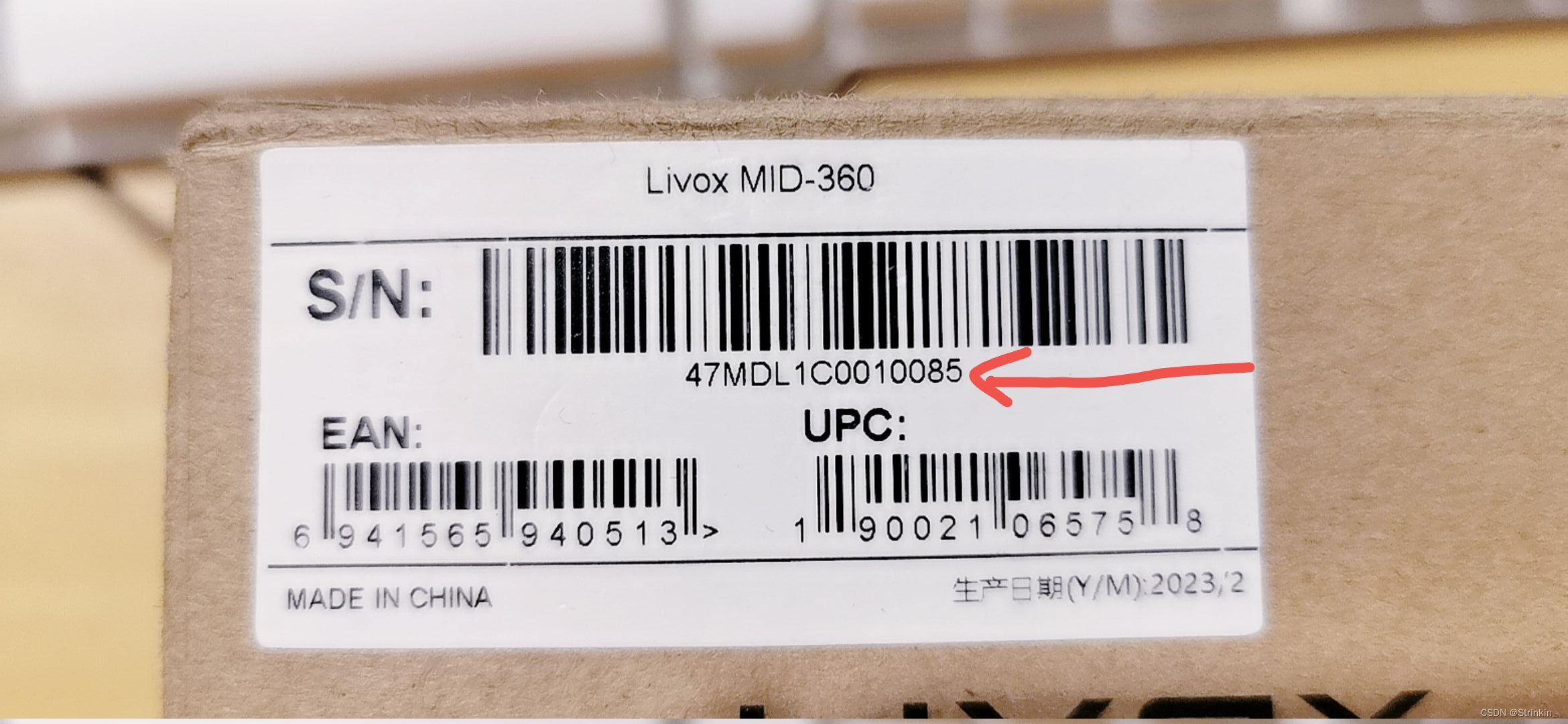
- 查看广播码47MDL1C000085,记住后两位(我的是85)。
1.更改livox_ros_driver2/config/MID360_config.json文件内ip
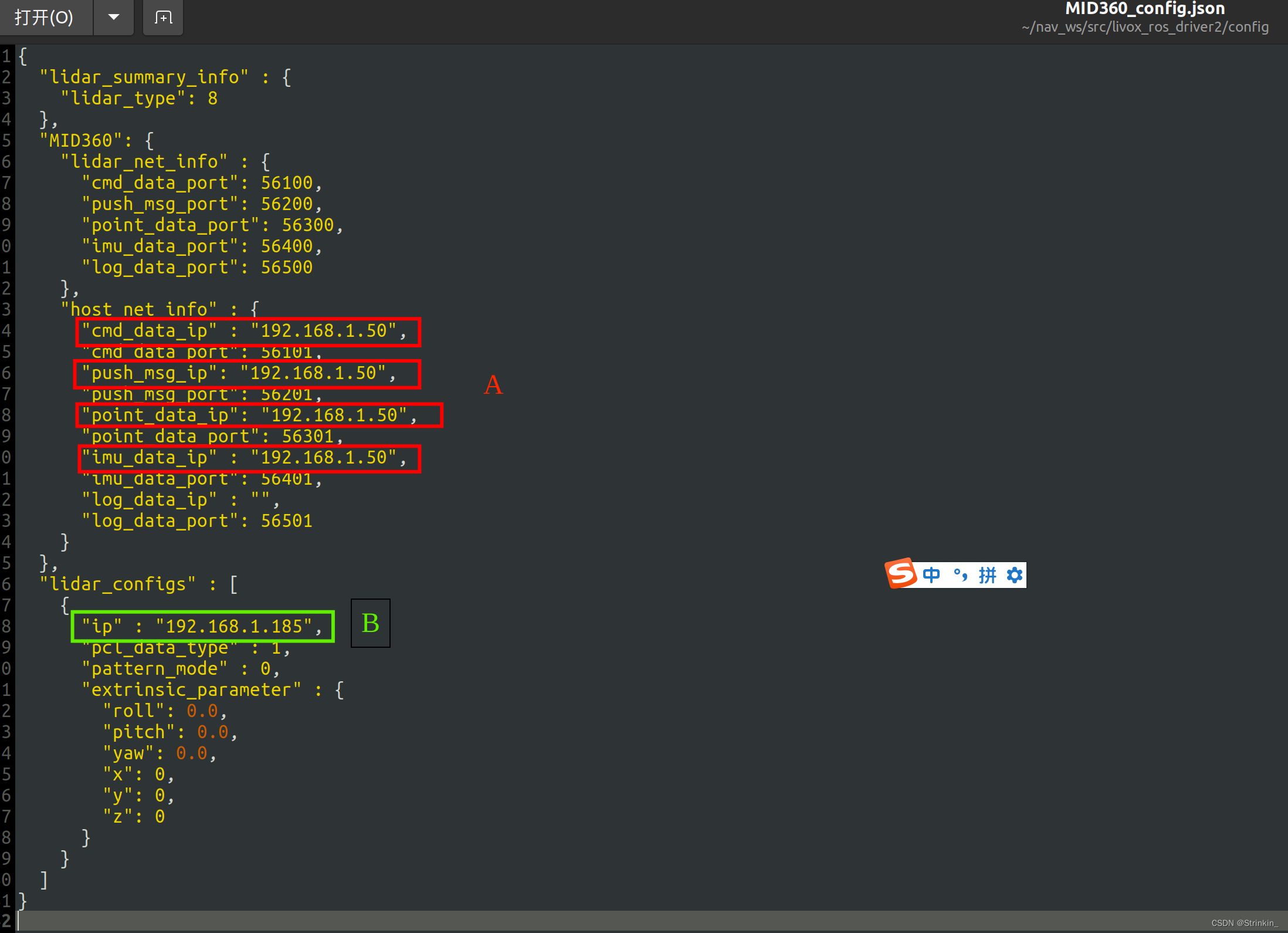
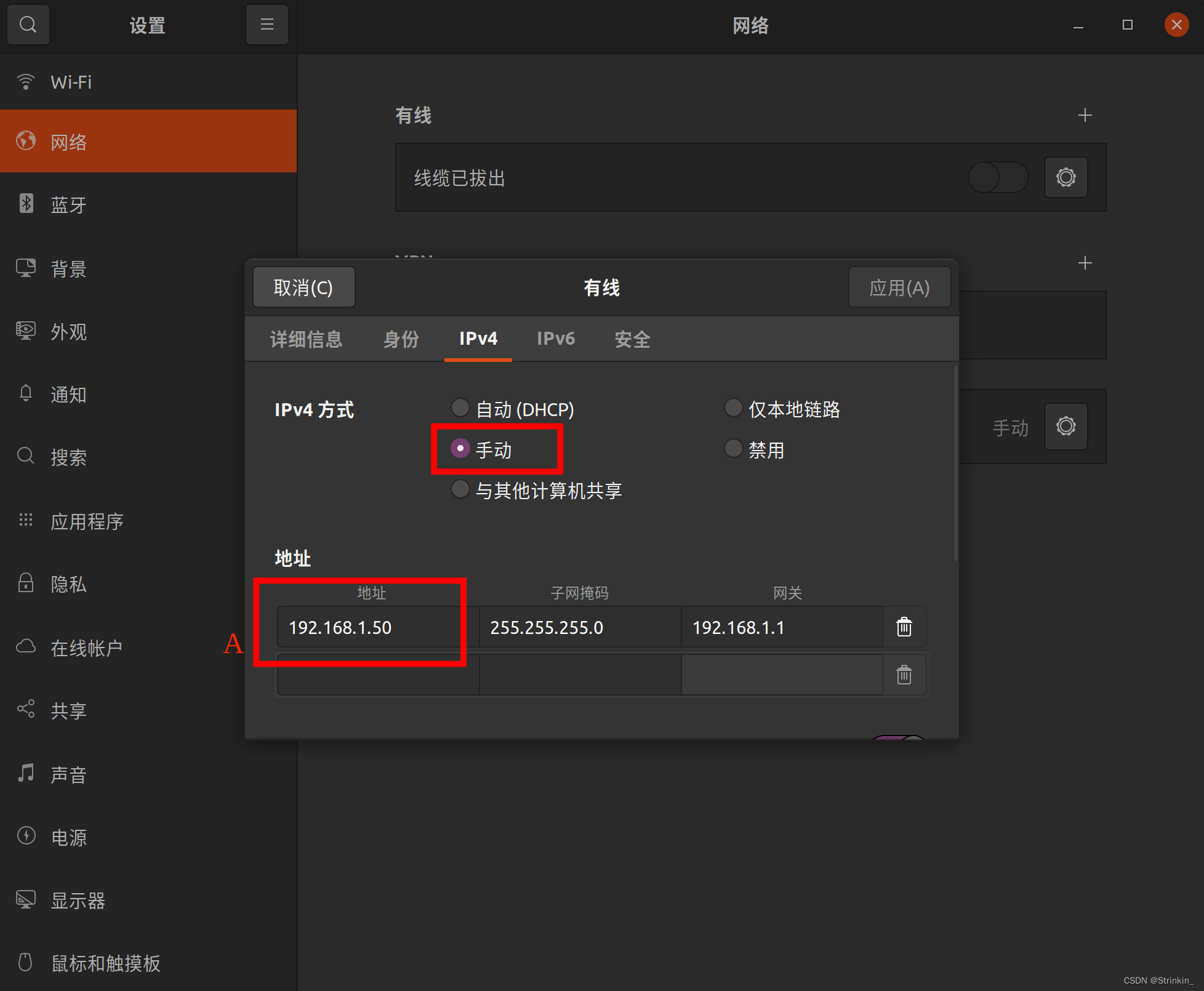
- 将A处改为192.168.1.50如上图。同时,网线连接雷达后,手动配置ip也需要改成192.168.1.50如下图
- 将B处改为192.168.1.1** (**为广播码后两位,我的是85,所以改为185)
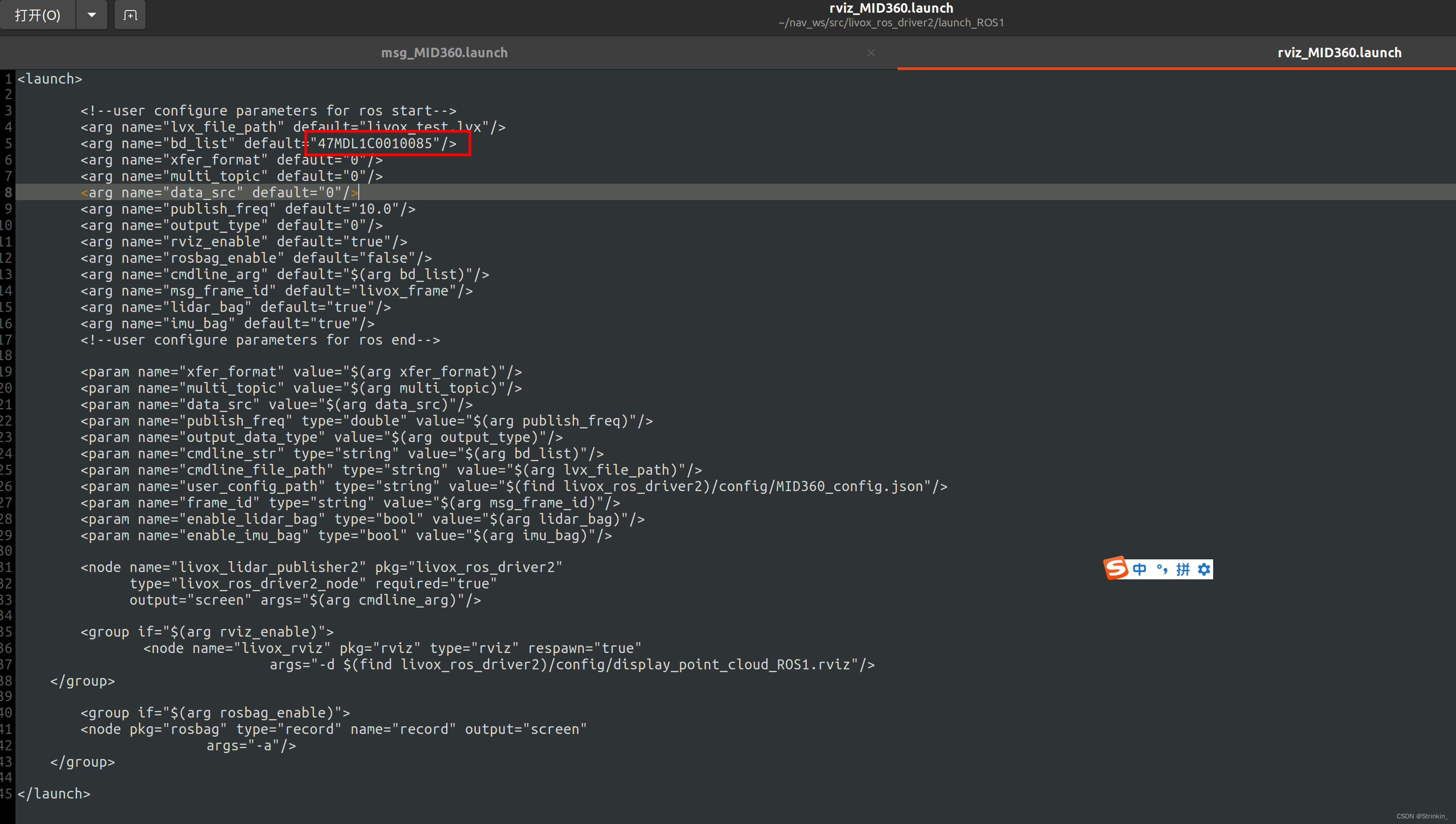
2.更改livox_ros_driver2/launch_ROS1/msg_MID360.launch文件内广播码

3.更改livox_ros_driver2/launch_ROS1/rviz_MID360.launch文件内参数
2025-6新增
运行测试
roslaunch livox_ros_driver2 rviz_MID360.launch
ros2 launch livox_ros_driver2 rviz_MID360_launch.py


















 1万+
1万+



 到【灌水乐园】发言
到【灌水乐园】发言








